1.本技术涉及无线通信技术领域,尤其涉及一种终端位置定位方法及设备。
背景技术:
2.3gpp在rel-16中提供了基于新空口(nr)信号进行终端定位的方法。基于无线蜂窝通信网络发送的参考信号的rat-independent定位方法包括以下实现步骤:
3.(1)定位参数测量:基于接收信号,估计与位置相关的参数。这些参数包括接收信号强度、传播时延、空间到达方向(direction of arrival,doa)、相位等信息。
4.(2)位置估计:基于上述测量值,采用位置解算算法计算终端位置。
5.doa是获取终端位置信息的重要几何参量,但是准确的二维doa估计(即同时估计水平到达角(a-aoa)和垂直到达角(z-aoa))需要阵列天线的支持。5g nr系统由于大规模天线的引入使得高精度的角度估计得以实现。采用大规模天线阵列,基站可以准确估计出来波的二维doa。
6.虽然大规模天线使得5g nr系统估计准确的二维doa成为可能,但是由于高性能doa参数估计方法的计算量庞大,限制了其在实际中的应用。
技术实现要素:
7.本技术实施例提供了一种终端位置定位方法及设备,用以降低终端定位处理开销。
8.第一方面,提供一种终端位置定位方法,包括:
9.获取目标终端的初始估计位置信息以及位置误差范围;
10.根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;
11.根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的到达角aoa扫描范围;
12.基于所述目标终端的aoa扫描范围进行到达角(doa)估计,得到所述目标终端的doa。
13.在一些实施例中,所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围;
14.所述根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围,包括:根据所述目标终端的x-y平面坐标以及x-y平面位置误差范围确定所述目标终端的x-y平面位置范围,根据所述目标终端的z轴坐标以及z轴位置误差范围确定所述目标终端的z轴方向位置范围;
15.所述根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围,包括:根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定所述目标终端的水平到达角a-aoa扫描范围,根据所述目标
终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的垂直到达角z-aoa扫描范围;
16.所述基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa,包括:基于所述目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到所述目标终端的二维doa。
17.在一些实施例中,所述目标终端的x-y平面位置范围是以所述目标终端的x-y平面坐标为圆心的圆形区域;
18.所述根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标,确定所述目标终端的a-aoa扫描范围,包括:
19.根据所述目标终端的x-y平面坐标以及所述基站的x-y平面坐标,确定所述目标终端与所述基站之间的连线与x轴之间的夹角
20.根据所述目标终端与所述基站之间的连线的长度以及所述圆形区域的半径,确定所述目标终端与所述基站之间的连线与以所述基站的x-y平面坐标为顶点的所述圆形区域的外切线之间的夹角
21.根据所述夹角以及所述夹角分别确定以所述基站的x-y平面坐标为顶点的所述圆形区域的两条外切线与x轴之间的夹角以及夹角
22.确定所述目标终端的a-aoa扫描范围在所述夹角与所述夹角之间。
23.在一些实施例中,所述目标终端的x-y平面位置范围是以所述目标终端的x-y平面坐标为圆心的圆形区域;
24.所述根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标,确定所述目标终端的a-aoa扫描范围,包括:
25.获取所述圆形区域的外切四边形;
26.选取所述外切四边形的四个顶点中的两个顶点,所述两个顶点与基站之间的连线所形成的夹角最大;
27.分别根据所述两个顶点的坐标以及基站的x-y平面坐标,确定所述两个顶点与所述基站之间的连线与x轴之间的夹角以及夹角
28.确定所述目标终端的a-aoa扫描范围在所述夹角与所述夹角之间。
29.在一些实施例中,所述目标终端的z轴方向位置范围是第一z轴坐标和第二z轴坐标之间的范围;其中,所述第一z轴坐标是以所述目标终端的z轴坐标为起点沿z轴方向向上延伸指定距离后的坐标,所述第二z轴坐标是以所述目标终端的z轴坐标为起点沿z轴方向向下延伸所述指定距离后的坐标,或者,所述第二z轴坐标是所述目标终端的z轴坐标在x-y平面的投影位置的坐标;
30.所述根据所述目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的z-aoa扫描范围,包括:
31.根据基站的z轴坐标以及所述第一z轴坐标,确定所述基站与所述第一z轴坐标对应的坐标点之间的连线与z轴之间的夹角θ1;
32.根据所述基站的z轴坐标以及所述第二z轴坐标,确定所述基站与所述第二z轴坐标对应的坐标点之间的连线与z轴之间的夹角θ2;
33.确定所述目标终端的z-aoa扫描范围在所述夹角θ1与所述夹角θ2之间。
34.在一些实施例中,所述目标终端的doa是基站天线阵列的本地坐标系内的doa;
35.所述还包括:根据所述本地坐标系与全局坐标系之间的映射关系,将所述本地坐标系内的doa转换为全局坐标系内的doa;或者,将所述本地坐标系内的doa发送给定位服务器,使得所述定位服务器根据所述本地坐标系与全局坐标系之间的映射关系,将所述本地坐标系内的doa转换为全局坐标系内的doa。
36.在一些实施例中,所述获取目标终端的初始估计位置信息以及位置误差范围,包括:基站接收定位服务器发送的所述目标终端的初始估计位置信息以及位置误差范围;或者,目标终端接收定位服务器发送的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息;或者,定位服务器获取目标终端的初始估计位置信息以及位置误差范围。
37.在一些实施例中,所述目标终端接收定位服务器发送的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息,包括:所述目标终端接收定位服务器发送的lte定位协议lpp信令,其中携带所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息;或者,所述目标终端接收基站发送的信令,其中携带所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息,所述信令是所述基站接收到定位服务器发送来的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息后发送给所述目标终端的,所述信令包括无线资源控制(rrc)信令或媒体接入控制控制单元(mac ce)或下行链路控制信息(dci)。
38.第二方面,提供一种基站,包括:
39.接收模块,用于接收定位服务器发送的目标终端的初始估计位置信息以及位置误差范围;
40.处理模块,用于根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;以及,基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
41.第三方面,提供一种定位服务器,包括:
42.获取模块,用于获取目标终端的初始估计位置信息以及位置误差范围;
43.位置范围确定模块,用于根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;
44.aoa扫描范围确定模块,用于根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;
45.doa确定模块,用于基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
46.第四方面,提供一种终端,包括:
47.接收模块,用于接收定位服务器发送的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息;
48.处理模块,用于根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的
位置信息,确定所述目标终端的aoa扫描范围;以及,基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
49.第五方面,提供一种基站,包括:处理器、存储器、收发机;所述收发机,在处理器的控制下进行数据的接收和发送;所述存储器,存储计算机指令;所述处理器,用于读取所述计算机指令,执行以下操作:
50.接收定位服务器发送的目标终端的初始估计位置信息以及位置误差范围;
51.根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;
52.根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;
53.基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
54.第六方面,提供一种定位服务器,包括:处理器、存储器;所述存储器,存储计算机指令;所述处理器,用于读取所述计算机指令,执行以下操作:
55.获取目标终端的初始估计位置信息以及位置误差范围;
56.根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;
57.根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;
58.基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
59.第七方面,提供一种终端,包括:处理器、存储器、收发机;所述收发机,在处理器的控制下进行数据的接收和发送;所述存储器,存储计算机指令;所述处理器,用于读取所述计算机指令,执行以下操作:
60.接收定位服务器发送的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息;
61.根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;
62.根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;
63.基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
64.第八方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如上述第一方面中任一项所述的方法。
65.本技术的上述实施例中,在对目标终端进行定位时,根据目标终端的初始估计位置信息以及位置误差范围,确定该目标终端的位置范围;根据该目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定目标终端的到达角aoa扫描范围,从而缩小aoa扫描范围,进而使得基于该aoa扫描范围进行doa估计时,可以减少开销,提高效率,降低复杂度。
附图说明
66.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,显而易见地,下面所介绍的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
67.图1为本技术实施例中5g nr系统的定位系统架构;
68.图2为本技术实施例中主要由基站实现的上行定位流程示意图;
69.图3为本技术实施例中终端的x-y平面位置范围示意图;
70.图4、图5分别为本技术实施例中终端的z轴方向位置范围示意图;
71.图6、图7分别为本技术实施例中终端的a-aoa扫描范围示意图;
72.图8、图9分别为本技术实施例中终端的z-aoa扫描范围示意图;
73.图10为本技术实施例中终端的doa估计流程示意图;
74.图11为本技术实施例中主要由定位服务器实现的上行定位流程示意图;
75.图12为本技术实施例中主要由终端实现的下行定位流程示意图;
76.图13为本技术实施例中主要由定位服务器实现的下行定位流程示意图;
77.图14为本技术实施例中的基站的结构示意图;
78.图15为本技术实施例中的终端的结构示意图;
79.图16为本技术实施例中的定位服务器的结构示意图;
80.图17为本技术另外的实施例提供的基站的结构示意图;
81.图18为本技术另外的实施例提供的终端的结构示意图;
82.图19为本技术另外的实施例提供的定位服务器的结构示意图。
具体实施方式
83.为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
84.以下对本技术实施例中的部分用语进行解释说明,以便于本领域技术人员理解。
85.(1)本技术实施例中,名词“网络”和“系统”经常交替使用,但本领域的技术人员可以理解其含义。
86.(2)本技术实施例中术语“多个”是指两个或两个以上,其它量词与之类似。
87.(3)“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
88.(4)网络设备,是一种为所述终端提供无线通信功能的设备,包括但不限于:5g中的gnb、无线网络控制器(radio network controller,rnc)、节点b(node b,nb)、基站控制器(base station controller,bsc)、基站收发台(base transceiver station,bts)、家庭基站(例如,home evolved nodeb,或home node b,hnb)、基带单元(baseband unit,bbu)、传输点(transmitting and receiving point,trp)、发射点(transmitting point,tp)、移
动交换中心等。本技术中的基站还可以是未来可能出现的其他通信系统中为终端提供无线通信功能的设备。本技术实施例以基站为例描述。
89.(5)终端,是一种可以向用户提供语音和/或数据连通性的设备。例如,终端设备包括具有无线连接功能的手持式设备、车载设备等。目前,终端设备可以是:手机(mobile phone)、平板电脑、笔记本电脑、掌上电脑、移动互联网设备(mobile internet device,mid)、可穿戴设备,虚拟现实(virtual reality,vr)设备、增强现实(augmented reality,ar)设备、工业控制(industrial control)中的无线终端、无人驾驶(self-driving)中的无线终端、智能电网(smart grid)中的无线终端、运输安全(transportation safety)中的无线终端、智慧城市(smart city)中的无线终端,或智慧家庭(smart home)中的无线终端等。
90.二维music(multiple signal classification,多信号分类)算法是二维doa估计的典型算法,该方法的基本步骤包括:
91.(1)根据接收信号向量得到协方差矩阵的估计值,即协方差矩阵r;
92.(2)对协方差矩阵r进行特征值分解;
93.(3)按特征值的大小顺序,把与信号个数相等的最大特征值对应的特征向量看成信号子空间,把剩下的特征值对应的特征向量看成噪声子空间;
94.(3)构造谱函数,其中包括了水平到达角(a-aoa)和垂直到达角(z-aoa)。遍历两个角度参数,通过寻找谱函数的峰值来得到doa的估计值。
95.二维music算法可以产生渐进无偏估计,但要在二维参数空间搜索谱峰,计算量大。应用于5g nr系统定位时,每一对基站和终端的doa估计都需要遍历一个庞大的角度搜索空间。以基站估计上行doa为例。在三维坐标系中,如果已知基站天线比终端天线的位置更高,z轴的搜索范围限定为91~180度,x-y平面搜索空间为0~360度。5g nr rel-16中,角度测量值的分辨率为0.1度,则二维music算法的角度搜索空间达到90*360/0.1=324,000个角度。每个搜索角度都需要计算一次谱函数的数值。
96.其他定位算法也存在类似问题。
97.本技术实施例提供了一种减小搜索空间的终端定位方法。可基于传播时延估计值,确定终端的位置范围。基于此位置范围,将空间的角度估计的庞大搜索空间降到一个较小的范围,可以有效降低位置定位估计的计算量与时间。
98.本技术实施例可应用于5g nr系统,并可应用于二维music算法等定位算法。
99.下面结合附图对本技术实施例进行详细描述。
100.图1示例性示出了5g nr系统中定位相关的实体。如图所示,面向5g nr定位,涉及的实体包括终端101、基站(102a,102b,102c)和定位服务器103。其中,定位服务也称为位置管理功能实体(location management function,lmf)。
101.本技术实施例中,定位服务器(lmf)可获得终端的初始估计位置、位置误差范围等信息,定位服务器、基站或终端可根据终端的初始估计位置、位置误差范围等信息,确定终端的位置范围,根据终端的初始估计位置信息以及位置范围,确定终端的到达角(aoa)扫描范围,基于终端的aoa扫描范围进行doa估计,从而得到该终端的到达角(doa)。
102.本技术实施例可应用于采用二维doa定位算法(如二维music算法)的终端定位过程中,当然也可应用于采用其他定位算法的终端定位过程中,本技术实施例对此不做限制。
103.其中,定位服务器可以基于低运算量定位方法获取终端的初始估计位置、位置误
差范围等信息。其中,所述低运算量定位方法可采用dl-tdoa(downlink-time difference of arrival,下行到达时间差)方法,也可采用ul-tdoa(uplink-time difference of arrival,上行到达时间差)方法。
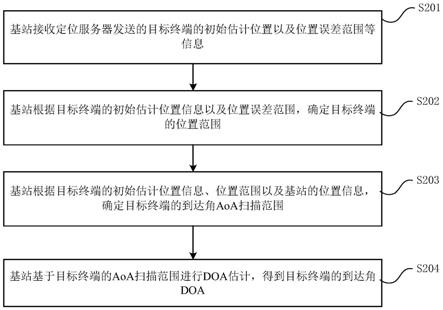
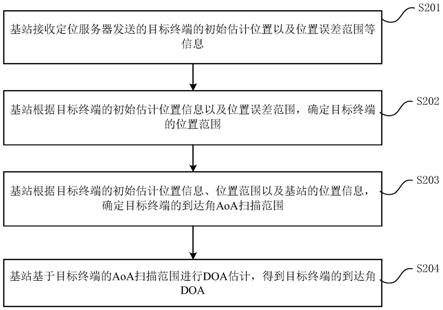
104.参见图2,为本技术实施例提供的一种上行定位流程示意图。该流程描述了主要由基站对目标终端的位置进行定位的流程,如图所示,该流程可包括如下步骤:
105.s201:基站接收定位服务器发送的目标终端的初始估计位置以及位置误差范围等信息。
106.以采用二维music算法为例,目标终端的初始估计位置信息可包括该目标终端的x-y平面坐标以及z轴坐标,目标终端的位置误差范围信息可包括该目标终端的x-y平面位置误差范围以及z轴位置误差范围。
107.在一些实施例中,在对目标终端进行doa估计之前,定位服务器(lmf)已经具备该终端的初始估计位置、位置误差范围等信息。在一些实施例中,如果定位服务器(lmf)不具备目标终端的初始估计位置以及位置误差范围等信息,则可以基于低运算量定位方法获取目标终端的初始估计位置、位置误差范围等信息。
108.举例来说,用于确定终端的初始估计位置以及位置误差范围的定位算法,可包括以下任意一种:
109.nr增强小区id的定位法(e-cid);
110.nr下行链路到达时差的定位法(dl-tdoa);
111.nr上行链路到达时差的定位法(ul-tdoa);
112.nr多小区往返行程时间的定位法(multi-rtt)。
113.上述这些定位算法复杂度都比较低,易于实现。
114.s202:基站根据目标终端的初始估计位置信息以及位置误差范围,确定目标终端的位置范围。
115.以采用二维music算法为例,基站可根据目标终端的x-y平面坐标以及x-y平面位置误差范围确定目标终端的x-y平面位置范围,根据目标终端的z轴坐标以及z轴位置误差范围确定目标终端的z轴方向位置范围。
116.在一些实施例中,目标终端的位置误差范围信息可以是以目标终端的x-y平面坐标为圆心的x-y平面中的圆形区域的半径r,该半径为r的圆形区域为目标终端的位置误差范围。终端位置的真值有很大的概率位于此区域内。
117.如图3所示,定位服务器(lmf)提供的终端(ue)x-y平面坐标存在一定的误差。以ue初始估计位置的x-y平面坐标值(x,y)为中心,以位置误差范围r为半径,绘制一个圆,圆内区域作为ue的x-y平面位置范围。ue的x-y平面坐标的真值有很大的概率位于此区域内。在估计该ue的水平到达角(a-aoa)时,可以认为该ue位于上述位置范围内,因此仅需要在这个较小的x-y平面位置范围内搜索该ue的a-aoa。
118.在一些实施例中,目标终端的z轴位置误差范围可以是以目标终端的z轴坐标为起点并沿z轴方向延伸一定距离h。终端位置的真值有很大的概率位于此区域内。
119.如图4所示,定位服务器(lmf)提供的ue z轴坐标存在一定的误差。以ue初始估计位置的z轴坐标值z为中心,沿z轴方向向上、向下分别扩展长度h,得到高度为2h的范围,此范围作为ue的z轴方向位置范围。ue z轴坐标的真值有很大的概率位于此范围内。在估计该
中的垂直到达角(z-aoa)时,可以认为ue位于上述位置范围内,因此仅需要在这个较小的z轴位置范围内搜索该ue的z-aoa。
120.如图5所示,目标终端的z轴方向位置范围也可通过以下方式确定:以ue初始估计位置的z轴坐标值z为中心,沿z轴方向向上扩展长度h,向下扩展至z轴坐标值z在x-y平面上的投影(扩展长度为h"),此范围作为ue的z轴方向位置范围。ue z轴坐标的真值有很大的概率位于此范围内。在估计该中的垂直到达角(z-aoa)时,可以认为ue位于上述位置范围内,因此仅需要在这个较小的z轴位置范围内搜索该ue的z-aoa。
121.s203:基站根据目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定目标终端的到达角aoa扫描范围。
122.以采用二维music算法为例,基站可根据目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标,确定目标终端的水平到达角a-aoa扫描范围,根据目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标,确定目标终端的垂直到达角z-aoa扫描范围。
123.s204:基站基于目标终端的aoa扫描范围进行doa估计,得到目标终端的到达角doa。
124.以采用二维music算法为例,该步骤中,可基于目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到目标终端的二维doa。
125.doa估计算法可以基于常规的二维music算法,本技术实施例对所采用的位置定位算法不做限制。
126.在一些实施例中,在s203中,以目标终端的x-y平面位置范围为以目标终端的x-y平面坐标为圆心的圆形区域为例,可通过以下步骤确定目标终端的a-aoa扫描范围:
127.步骤1:根据目标终端的x-y平面坐标以及基站的x-y平面坐标,确定目标终端与基站之间的连线与x轴之间的夹角
128.步骤2:根据目标终端与基站之间的连线的长度以及上述圆形区域的半径,确定目标终端与基站之间的连线与以基站的x-y平面坐标为顶点的该圆形区域的外切线之间的夹角
129.步骤3:根据夹角以及夹角分别确定以该基站的x-y平面坐标为顶点的该圆形区域的两条外切线与x轴之间的夹角以及夹角
130.步骤4:根据夹角以及夹角确定目标终端的a-aoa扫描范围在夹角与夹角之间。
131.以图3所示的ue的x-y平面位置范围为例,图6示出了ue的a-aoa扫描范围的计算过程。如图6所示,a点位为基站位置中心点,b点是位置解算算法估计的ue x-y平面坐标位置,半径为r的圆形区域是ue的x-y平面位置范围。连线ac和连线ad为该圆的切线,基站中心点a到ue中心点b的距离为d。为连线ac与x轴的夹角,为直线ad与x轴的夹角。该ue的终端的a-aoa扫描范围为即,该ue的水平角度估计仅需在区间内搜索。
132.其中,夹角和夹角的计算过程包括:
133.步骤1:根据a点和b点坐标,计算连线ab与x轴的夹角
134.步骤2:根据直角三角形acb的两个边长d和r,计算得到∠cab(可将该夹角称为夹角)。
135.步骤3:计算夹角和夹角
[0136][0137][0138]
在另一些实施例中,在s203中,以目标终端的x-y平面位置范围为以目标终端的x-y平面坐标为圆心的圆形区域为例,可通过以下步骤确定目标终端的a-aoa扫描范围:
[0139]
步骤1:获取上述圆形区域的外切四边形;
[0140]
步骤2:选取该外切四边形的四个顶点中的两个顶点,该两个顶点与基站之间的连线所形成的夹角最大;
[0141]
步骤3:分别根据该两个顶点的坐标以及基站的x-y平面坐标,确定该两个顶点与基站之间的连线与x轴之间的夹角以及夹角
[0142]
步骤4:根据夹角以及夹角确定目标终端的a-aoa扫描范围在夹角与夹角之间。
[0143]
以图3所示的ue的x-y平面位置范围为例,图7示出了ue的a-aoa扫描范围的计算过程。如图7所示,a点位为基站位置中心点,b点是位置解算算法估计的ue x-y平面坐标位置,半径为r的圆形区域是ue的x-y平面位置范围。该ue的a-aoa扫描范围为即,该ue的水平角度估计仅需在区间内搜索。
[0144]
其中,夹角和夹角的计算过程包括:
[0145]
步骤1:在上述圆形区域外部绘制一个正方形区域,正方形的4条边分别与圆相切,且分别与x轴或y轴平行。
[0146]
步骤2:根据b点坐标,以及圆的半径r,计算得到正方形区域顶点c点和d点坐标。其中,正方形的顶点c和顶点d与a点之间的连线ac和ad,连线ac和连线ad之间的夹角大于其他任何两个顶点与a点连线之间的夹角。
[0147]
步骤3:根据a点、c点、d点坐标,计算得到夹角和夹角
[0148]
在一些实施例中,在s203中,以目标终端的z轴方向位置范围为第一z轴坐标和第二z轴坐标之间的范围为例,可通过以下步骤确定目标终端的z-aoa扫描范围:
[0149]
步骤1:根据基站的z轴坐标以及第一z轴坐标,确定基站与第一z轴坐标对应的坐标点之间的连线与z轴之间的夹角θ1;
[0150]
步骤2:根据基站的z轴坐标以及第二z轴坐标,确定基站与第二z轴坐标对应的坐标点之间的连线与z轴之间的夹角θ2;
[0151]
步骤3:根据夹角θ1以及夹角θ2,确定目标终端的z-aoa扫描范围在夹角θ1与所述夹角θ2之间。
[0152]
其中,第一z轴坐标和第二z轴坐标可以分别为以目标终端的z轴坐标为起点沿z轴方向向上和向下延伸指定距离后的坐标。针对此种情况,图8示出了终端的z-aoa扫描范围的计算过程。
[0153]
如图8所示,a点为基站位置中心点,b点是位置解算算法估计的ue z轴坐标位置,
图中e点和f点的连线间区域为ue的z轴方向位置范围。θ1为连线ae与z轴的夹角,θ2为连线af与z轴的夹角。该ue的z-aoa扫描范围为[θ1,θ2],即,该ue的垂直角度估计仅需在[θ1,θ2]区间内搜索。
[0154]
其中,夹角θ1和夹角θ2的计算过程包括:
[0155]
步骤1:根据b点坐标和h=3σ2,计算得到e点和f点坐标。
[0156]
步骤2:根据a点和e点坐标计算该2点连线ae与x轴的夹角θ1。
[0157]
步骤3:根据a点和f点坐标计算该2点连线af与x轴的夹角θ2。
[0158]
在另一些实施例中,第一z轴坐标为以目标终端的z轴坐标为起点沿z轴方向向上延伸指定距离后的坐标,第二z轴坐标为目标终端的z轴坐标在x-y平面的投影位置的坐标。针对此种情况,图9示出了终端的z-aoa扫描范围的计算过程。
[0159]
如图9所示,a点为基站位置中心点,b点是位置解算算法估计的ue z轴坐标位置,图中g点是b点在x-y平面的投影。θ1为ae与z轴的夹角,θ2为af与z轴的夹角。该ue的z-aoa扫描范围为[θ1,θ2],即,该ue的垂直角度估计仅需在[θ1,θ2]区间内搜索。
[0160]
其中,夹角θ1和夹角θ2的计算过程包括:
[0161]
步骤1:根据b点坐标和h=3σ2,计算得到e点和f点坐标。
[0162]
步骤2:根据a点和e点坐标计算该2点连线ae与x轴的夹角θ1。
[0163]
步骤3:根据a点和g点坐标计算该2点连线af与x轴的夹角θ2。
[0164]
在一些实施例中,以采用二维music算法为例,在图2所示的流程s204中,基于目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计的过程,如图10所示,可包括以下步骤:
[0165]
s1001:基站根据终端的a-aoa扫描范围和z-aoa扫描范围,计算基站天线阵列的导向向量和流型矩阵。
[0166]
如果接收端的天线为n行m列均匀天线面阵,其天线元素是均匀各向同性的,共有d(d≦m*n)路信号分别到达天线阵列。则t时刻天线阵列端的接收信号为x(t),则天线阵列的导向向量和流型矩阵构成如下:
[0167][0168][0169][0170]
其中,θ
i
是第i路信号的垂直到达角,是第i路信号的水平到达角,d
r
是天线阵列元素行间距,d
c
是天线阵列元素列间距。
[0171]
s1002:基站求解x(t)的自相关:
[0172]
r
x
=e[x(t)x(t)
h
]
………………
(4)
[0173]
s1003:基站构建谱函数。
[0174]
基站侧对自相关矩阵r
x
进行特征值分解,并将特征值从大到小排序,特征矩阵根
据对应关系做出相应调整,最终得到特征值向量v
λ
和特征矩阵t
λ
。
[0175]
前面d个特征值λ1,λ2,
…
,λ
d
对应信号,其余m-d特征值λ
d 1
,λ
d 2
,
…
,λ
mn
对应噪声。根据排序后特征值依次构建d个谱函数,第i个谱函数构建过程如下:
[0176][0177]
e
n
=[ν
d 1
ν
d 2
ꢀ…ꢀ
ν
mn
]
………………
(6)
[0178]
则构建的谱函数为:
[0179][0180]
s1004:基站估计到基站天线面阵的doa角度。
[0181]
在xy平面和z轴方向,搜索构建谱函数p
i
的谱峰。需要对中的水平到达角垂直到达角θ
i
做二重循环的搜索,计算不同水平到达角、垂直到达角组合下谱函数的数值。
[0182][0183]
上述过程中,θ1和θ2分别是垂直到达角的搜索上限和下限,θ
i
仅需在这两个角度之间搜索即可。θ
step
表示垂直到达角搜索的步进值,对应垂直到达角的估计分辨率。
[0184]
和分别是水平到达角搜索方位的上限和下限,仅需在这两个角度之间搜索即可。表示水平到达角搜索的步进值,对应水平到达角的估计分辨率。
[0185][0186]
谱峰最大值对应的角度即是第i组到达角的估计值,其包括垂直到达角θ_est
i
和水平到达角由于将二重循环的范围仅限定在一个较小的数值,而不是在全部空间搜索,本技术实施例可以有效降低总循环次数,降低运算次数和运算时间。
[0187]
s1005:基站根据本地坐标系与全局坐标系之间的映射关系,将s1004中得到的本地坐标系内的doa转换为全局坐标系内的doa。
[0188]
该步骤中,基站根据s1004中计算得到的doa角度(以基站天线面阵为参考的doa角度),对基站与终端之间的doa角度进行估计。
[0189]
本技术实施例中,当估计终端的aoa时,需要知道接收机天线阵列的本地坐标系(lcs)与定位用的全局坐标系(gcs)转换关系信息,即tr38.901[1]所定义的bearing angle(轴向角度)、downtilt angle(下倾角度)、slant angle(倾斜角度)。基站的天线面阵安装完毕后,可以得到天线面阵的这3个角度信息。
[0190]
在上行doa估计时,基站接收机天线阵列的lcs与定位用的gcs的转换关系信息(即tr38.901[1]所定义的bearing angle(轴向角度)、downtilt angle(下倾角度)、slant angle(倾斜角度))一般是固定的,可以在doa估计前事先通过测量或其他方法得知。
[0191]
s1004中估计得到的doa角度是以基站天线面阵为参考的。参考tr38.901[1]提供的lcs与gcs转换方法,基站可将以基站天线面阵为参考的doa角度转换为基站与终端之间的角度信息。
[0192]
在另外的一些实施例中,s1005的一种替代方式为:基站将s1004中计算得到的doa角度(以基站天线面阵为参考的doa角度)发送给定位服务器(lmf),由定位服务器将以基站天线面阵为参考的doa角度转换为基站与终端之间的角度信息。
[0193]
参见图11,为本技术实施例提供的一种上行定位流程示意图。该流程描述了主要由定位服务器(lmf)对目标终端的位置进行定位的流程,如图所示,该流程可包括如下步骤:
[0194]
s1101:定位服务器(lmf)获取目标终端的初始估计位置以及位置误差范围等信息。
[0195]
在一些实施例中,定位服务器(lmf)可以基于低运算量定位方法获取目标终端的初始估计位置、位置误差范围等信息。
[0196]
s1102:定位服务器(lmf)根据目标终端的初始估计位置信息以及位置误差范围,确定目标终端的位置范围。
[0197]
s1103:定位服务器(lmf)根据目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定目标终端的到达角aoa扫描范围。
[0198]
s1104:定位服务器(lmf)将目标终端的到达角aoa扫描范围信息发送给基站,使得基站基于目标终端的aoa扫描范围进行doa估计,得到目标终端的到达角doa。
[0199]
图11所示的流程中,s1101至s1104中定位服务器(lmf)所执行的操作,与图2中基站所执行的操作基本相同;s1104中,定位服务器基于目标终端的aoa扫描范围进行doa估计,得到目标终端的到达角doa的过程,也与图2中基站侧的操作基本相同。其中,定位服务器在得到目标终端的本地坐标系内的doa后,可将其转换为全局坐标系内的doa,也可将目标终端的本地坐标系内的doa发送给基站,由基站将其转换为全局坐标系内的doa。
[0200]
参见图12,为本技术实施例提供的一种下行定位流程示意图。该流程描述了主要由终端对其自身位置进行定位的流程,如图所示,该流程可包括如下步骤:
[0201]
s1201:目标终端接收定位服务器发送的目标终端的初始估计位置以及位置误差范围等信息。
[0202]
其中,定位服务器还可将用于定位的基站的位置信息发送给该目标终端。
[0203]
在一些实施例中,定位服务器(lmf)可以基于低运算量定位方法获取目标终端的初始估计位置、位置误差范围等信息。
[0204]
在一些实施例中,定位服务器可通过lpp(lte positioning protocol,lte定位协议)信令,将目标终端的初始估计位置以及位置误差范围等信息发送给终端。
[0205]
在另一些实施例中,定位服务器(lmf)可将目标终端的初始估计位置以及位置误差范围等信息发送给基站,再由基站通过rrc(radio resource control,无线资源控制)信令或mac(media access control,媒体接入控制)ce(control element,控制单元)或dci
(downlink control information,下行链路控制信息)等信令发送给终端。
[0206]
s1202:目标终端根据该目标终端的初始估计位置信息以及位置误差范围,确定目标终端的位置范围。
[0207]
s1203:目标终端根据该目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定该目标终端的到达角aoa扫描范围。
[0208]
s1204:目标终端基于目标终端的aoa扫描范围进行doa估计,得到目标终端的到达角doa。
[0209]
图12所示的流程中,s1201至s1204中目标终端所执行的操作,与图2中基站所执行的操作基本相同;s1204中,目标终端基于其aoa扫描范围进行doa估计,得到目标终端的到达角doa的过程,也与图2中基站侧的操作基本相同,在此不再重复。其中,目标终端在得到目标终端的本地坐标系内的doa后,可将其转换为全局坐标系内的doa,也可将目标终端的本地坐标系内的doa发送给定位服务器(lmf),由定位服务器(lmf)将其转换为全局坐标系内的doa。
[0210]
在下行doa估计时,由于终端的移动性,lcs与gcs的转换关系信息一般是不固定的。这时,可用其他方法得到该转换关系信息,例如用惯性测量单元提供该信息。
[0211]
参见图13,为本技术实施例提供的一种下行定位流程示意图。该流程描述了主要由定位服务器(lmf)对目标终端位置进行定位的流程,如图所示,该流程可包括如下步骤:
[0212]
s1301:定位服务器(lmf)获取目标终端的初始估计位置以及位置误差范围等信息。
[0213]
在一些实施例中,定位服务器(lmf)可以基于低运算量定位方法获取目标终端的初始估计位置、位置误差范围等信息。
[0214]
s1302:定位服务器(lmf)根据该目标终端的初始估计位置信息以及位置误差范围,确定目标终端的位置范围。
[0215]
s1303:定位服务器(lmf)根据该目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定该目标终端的到达角aoa扫描范围。
[0216]
s1304:定位服务器(lmf)将该目标终端的到达角aoa扫描范围发送给该目标终端,使得该目标终端基于其aoa扫描范围进行doa估计,得到该目标终端的到达角doa。
[0217]
图13所示的流程中,s1301至s1304中定位服务器(lmf)所执行的操作,与图2中基站所执行的操作基本相同;s1304中,定位服务器(lmf)基于目标终端的aoa扫描范围进行doa估计,得到目标终端的到达角doa的过程,也与图2中基站侧的操作基本相同,在此不再重复。其中,定位服务器在得到目标终端的本地坐标系内的doa后,可将其转换为全局坐标系内的doa,也可将目标终端的本地坐标系内的doa发送给终端,由终端将其转换为全局坐标系内的doa。
[0218]
在下行doa估计时,由于终端的移动性,lcs与gcs的转换关系信息一般是不固定的。这时,可用其他方法得到该转换关系信息,例如用惯性测量单元提供该信息。
[0219]
根据以上描述可以看出,本技术实施例中,在对目标终端进行定位时,根据目标终端的初始估计位置信息以及位置误差范围,确定该目标终端的位置范围;根据该目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定目标终端的aoa扫描范围,从而缩小aoa扫描范围,进而使得基于该aoa扫描范围进行doa估计时,可以减少开销,提高效率,
降低复杂度。
[0220]
在采用二维music算法进行终端定位时,将角度搜索空间限定在一个较小的范围,而不是全部空间,因此可以有效降低二维music算法的搜索空间,进而有效降低运算次数和运算时间,进而使得本技术实施例适用性更广泛。此外,对于5g nr定位系统而言,本技术实施例中定位服务器传输的消息简单,所需控制信令开销较小。
[0221]
基于相同的技术构思,本技术实施例还提供了一种基站。该基站可以实现前述实施例中基站侧的功能。
[0222]
参见图14,为本技术实施例提供的基站的结构示意图。该基站可包括:处理模块1401、发送模块1402、接收模块1403。
[0223]
接收模块1403,用于接收定位服务器发送的目标终端的初始估计位置信息以及位置误差范围;
[0224]
处理模块1401,用于根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;以及,基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
[0225]
在一些实施例中,所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围。相应的,处理模块1401具体用于:
[0226]
根据所述目标终端的x-y平面坐标以及x-y平面位置误差范围确定所述目标终端的x-y平面位置范围,根据所述目标终端的z轴坐标以及z轴位置误差范围确定所述目标终端的z轴方向位置范围;
[0227]
根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定所述目标终端的水平到达角a-aoa扫描范围,根据所述目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的垂直到达角z-aoa扫描范围;
[0228]
基于所述目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到所述目标终端的二维doa。
[0229]
在此需要说明的是,本技术实施例提供的上述基站,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0230]
基于相同的技术构思,本技术实施例还提供了一种终端。该终端可以实现前述实施例中终端侧的功能。
[0231]
参见图15,为本技术实施例提供的终端的结构示意图。该终端可包括:处理模块1501、发送模块1502、接收模块1503。
[0232]
接收模块1503,用于接收定位服务器发送的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息;
[0233]
处理模块1501,用于根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;以及,基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
[0234]
在一些实施例中,所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围。相应的,处理模块1501具体用于:
[0235]
根据该终端的x-y平面坐标以及x-y平面位置误差范围确定该终端的x-y平面位置范围,根据该终端的z轴坐标以及z轴位置误差范围确定该终端的z轴方向位置范围;
[0236]
根据该终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定该终端的a-aoa扫描范围,根据该终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的z-aoa扫描范围;
[0237]
基于该终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到该终端的二维doa。
[0238]
在此需要说明的是,本技术实施例提供的上述终端,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0239]
基于相同的技术构思,本技术实施例还提供了一种定位服务器。该定位服务器可以实现前述实施例中定位侧的功能。
[0240]
参见图16,为本技术实施例提供的定位服务器的结构示意图。该终端可包括:获取模块1601、位置范围确定模块1602、aoa扫描范围确定模块1603、doa确定模块1604。
[0241]
获取模块1601,用于获取目标终端的初始估计位置信息以及位置误差范围;
[0242]
位置范围确定模块1602,用于根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;
[0243]
aoa扫描范围确定模块1603,用于根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息1604,确定所述目标终端的aoa扫描范围;
[0244]
doa确定模块1604,用于基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
[0245]
在一些实施例中,获取模块1601获取到的信息包括:所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围。相应的,位置范围确定模块1602具体用于:根据所述目标终端的x-y平面坐标以及x-y平面位置误差范围确定所述目标终端的x-y平面位置范围,根据所述目标终端的z轴坐标以及z轴位置误差范围确定所述目标终端的z轴方向位置范围。aoa扫描范围确定模块1603具体用于:根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定所述目标终端的水平到达角a-aoa扫描范围,根据所述目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的垂直到达角z-aoa扫描范围。doa确定模块1604具体用于:基于所述目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到所述目标终端的二维doa。
[0246]
在此需要说明的是,本技术实施例提供的上述定位服务器,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0247]
基于相同的技术构思,本技术实施例还提供了一种基站。该基站可以实现前述实施例中基站侧的功能。
[0248]
参见图17,为本技术实施例提供的基站的结构示意图。如图所示,该基站可包括:处理器1701、存储器1702、收发机1703以及总线接口1704。
[0249]
处理器1701负责管理总线架构和通常的处理,存储器1702可以存储处理器1701在执行操作时所使用的数据。收发机1703用于在处理器1701的控制下接收和发送数据。
[0250]
总线架构可以包括任意数量的互联的总线和桥,具体由处理器1701代表的一个或多个处理器和存储器1702代表的存储器的各种电路链接在一起。总线架构还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口提供接口。处理器1701负责管理总线架构和通常的处理,存储器1702可以存储处理器1701在执行操作时所使用的数据。
[0251]
本技术实施例揭示的流程,可以应用于处理器1701中,或者由处理器1701实现。在实现过程中,信号处理流程的各步骤可以通过处理器1701中的硬件的集成逻辑电路或者软件形式的指令完成。处理器1701可以是通用处理器、数字信号处理器、专用集成电路、现场可编程门阵列或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件,可以实现或者执行本技术实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本技术实施例所公开的方法的步骤可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器1702,处理器1701读取存储器1702中的信息,结合其硬件完成信号处理流程的步骤。
[0252]
具体地,处理器1701,用于读取存储器1702中的计算机指令并执行图2所示的流程中基站实现的功能。
[0253]
具体地,处理器1701可以读取存储器1702中的计算机指令,执行以下操作:接收定位服务器发送的目标终端的初始估计位置信息以及位置误差范围;根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
[0254]
在一些实施例中,所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围。相应的,处理器1701具体用于:
[0255]
根据所述目标终端的x-y平面坐标以及x-y平面位置误差范围确定所述目标终端的x-y平面位置范围,根据所述目标终端的z轴坐标以及z轴位置误差范围确定所述目标终端的z轴方向位置范围;
[0256]
根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定所述目标终端的水平到达角a-aoa扫描范围,根据所述目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的垂直到达角z-aoa扫描范围;
[0257]
基于所述目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到所述目标终端的二维doa。
[0258]
在此需要说明的是,本发明实施例提供的上述基站,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例
相同的部分及有益效果进行具体赘述。
[0259]
基于相同的技术构思,本技术实施例还提供了一种终端。该终端可以实现前述实施例中终端侧的功能。
[0260]
参见图18,为本技术实施例提供的终端的结构示意图。如图所示,该终端可包括:处理器1801、存储器1802、收发机1803以及总线接口1804。
[0261]
处理器1801负责管理总线架构和通常的处理,存储器1802可以存储处理器1801在执行操作时所使用的数据。收发机1803用于在处理器1801的控制下接收和发送数据。
[0262]
总线架构可以包括任意数量的互联的总线和桥,具体由处理器1801代表的一个或多个处理器和存储器1802代表的存储器的各种电路链接在一起。总线架构还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口提供接口。处理器1801负责管理总线架构和通常的处理,存储器1802可以存储处理器1801在执行操作时所使用的数据。
[0263]
本技术实施例揭示的流程,可以应用于处理器1801中,或者由处理器1801实现。在实现过程中,信号处理流程的各步骤可以通过处理器1801中的硬件的集成逻辑电路或者软件形式的指令完成。处理器1801可以是通用处理器、数字信号处理器、专用集成电路、现场可编程门阵列或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件,可以实现或者执行本技术实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本技术实施例所公开的方法的步骤可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器1802,处理器1801读取存储器1802中的信息,结合其硬件完成信号处理流程的步骤。
[0264]
具体地,处理器1801,用于读取存储器1802中的计算机指令并执行图12所示的流程中终端实现的功能。
[0265]
具体地,处理器1801可以读取存储器1802中的计算机指令,执行以下操作:接收定位服务器发送的所述目标终端的初始估计位置信息、位置误差范围以及基站的位置信息;根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
[0266]
在一些实施例中,所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围。相应的,处理器1801具体用于:
[0267]
根据所述目标终端的x-y平面坐标以及x-y平面位置误差范围确定所述目标终端的x-y平面位置范围,根据所述目标终端的z轴坐标以及z轴位置误差范围确定所述目标终端的z轴方向位置范围;
[0268]
根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定所述目标终端的水平到达角a-aoa扫描范围,根据所述目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的垂直到达角z-aoa扫描范围;
[0269]
基于所述目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到所述目标终端的二维doa。
[0270]
在此需要说明的是,本发明实施例提供的上述终端,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0271]
基于相同的技术构思,本技术实施例还提供了一种定位服务器。该定位服务器可以实现前述实施例中定位服务器侧的功能。
[0272]
参见图19,为本技术实施例提供的定位服务器的结构示意图。如图所示,该定位服务器可包括:处理器1901、存储器1902、通信接口1903以及总线接口1904。
[0273]
处理器1901负责管理总线架构和通常的处理,存储器1902可以存储处理器1901在执行操作时所使用的数据。通信接口1903用于在处理器1901的控制下接收和发送数据。
[0274]
总线架构可以包括任意数量的互联的总线和桥,具体由处理器1901代表的一个或多个处理器和存储器1902代表的存储器的各种电路链接在一起。总线架构还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口提供接口。处理器1901负责管理总线架构和通常的处理,存储器1902可以存储处理器1901在执行操作时所使用的数据。
[0275]
本技术实施例揭示的流程,可以应用于处理器1901中,或者由处理器1901实现。在实现过程中,信号处理流程的各步骤可以通过处理器1901中的硬件的集成逻辑电路或者软件形式的指令完成。处理器1901可以是通用处理器、数字信号处理器、专用集成电路、现场可编程门阵列或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件,可以实现或者执行本技术实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本技术实施例所公开的方法的步骤可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器1902,处理器1901读取存储器1902中的信息,结合其硬件完成信号处理流程的步骤。
[0276]
具体地,处理器1901,用于读取存储器1902中的计算机指令并执行图13所示的流程中基站实现的功能。
[0277]
具体地,处理器1901可以读取存储器1902中的计算机指令,执行以下操作:获取目标终端的初始估计位置信息以及位置误差范围;根据所述目标终端的初始估计位置信息以及位置误差范围,确定所述目标终端的位置范围;根据所述目标终端的初始估计位置信息、位置范围以及基站的位置信息,确定所述目标终端的aoa扫描范围;基于所述目标终端的aoa扫描范围进行doa估计,得到所述目标终端的doa。
[0278]
在一些实施例中,所述初始估计位置信息包括x-y平面坐标以及z轴坐标,所述位置误差范围包括x-y平面位置误差范围以及z轴位置误差范围。相应的,处理器1901具体用于:
[0279]
根据所述目标终端的x-y平面坐标以及x-y平面位置误差范围确定所述目标终端的x-y平面位置范围,根据所述目标终端的z轴坐标以及z轴位置误差范围确定所述目标终端的z轴方向位置范围;
[0280]
根据所述目标终端的x-y平面坐标、x-y平面位置范围以及基站的x-y平面坐标确定所述目标终端的水平到达角a-aoa扫描范围,根据所述目标终端的z轴坐标、z轴方向位置范围以及基站的z轴坐标确定所述目标终端的垂直到达角z-aoa扫描范围;
[0281]
基于所述目标终端的a-aoa扫描范围和z-aoa扫描范围进行doa估计,得到所述目标终端的二维doa。
[0282]
在此需要说明的是,本发明实施例提供的上述定位服务器,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0283]
本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令用于使计算机执行上述实施例中基站所执行的方法。
[0284]
本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令用于使计算机执行上述实施例中终端所执行的方法。
[0285]
本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令用于使计算机执行上述实施例中定位服务器所执行的方法。
[0286]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0287]
本技术是参照根据本技术的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0288]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0289]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0290]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。