1.本发明涉及当透镜组件与图像传感器耦合时,对所述透镜组件的多个透镜元件进行对准,以便在光学系统中获得优化的图像质量。
背景技术:
2.在用于照相机模块的光学系统的组件中,例如在智能手机和便携式个人设备中的光学系统的组件中,照相机模块的光学性能或成像质量很大程度上取决于其光学元件是否能精确对准。对准包括透镜组件与图像传感器芯片之间的对准,以及透镜组件中包括的透镜元件之间的精确对准。
3.在上述光学元件的对准过程中,照相机模块主动对准(aa)工艺用于最佳地对准透镜组件与图像传感器芯片。在此过程中,给图像传感器供电以通过所述镜片组件捕获测试图表中的图像,如美国专利号为9,009,952的发明“用于组装透镜模块和图像传感器以形成照相机模块的设备及其组装方法”中所述。为了制作至少在所述图像传感器的中心和外围区域获得的图像质量优化的照相机模块,可利用六轴运动系统来保持所述透镜组件或所述图像传感器芯片,以保证图像传感器芯片与透镜组件的成像平面精确对准。
4.此外,为了避免由透镜组件本身引起的图像质量下降,需要准确地设计和制造每个透镜元件,并且需要精确地控制每个透镜元件的组装公差。在常规的透镜组件中,包括在透镜组件中的各个透镜元件逐个地安装在透镜架上。为了在安装过程中牢固地固定每个透镜元件,需要不同的互锁设计来保持各个透镜元件相对于彼此的方向。然而,当透镜元件的数量增加时,组装公差的要求更为严格,并且在这种设计中的组装误差变得更难控制。同时,在常规的透镜元件的安装和组装过程中,由于由诸如安装精度等因素引起的累积组装误差和由各个透镜元件引起的制造缺陷,无法总体上管理透镜组件的光学性能。因此,当每个透镜组件中包括的透镜元件的数量增加时,透镜组件生产中的最终成品率损失也将趋于增长。
5.图1为常规的包括组装在互锁透镜架100中的多个透镜元件的透镜组件的横截面图。在aa的过程中,安装在互锁透镜架100中的所述透镜元件关于位于传感器板102上的功能图像传感器104对准。对准后,理想情况下,互锁透镜架100沿对准方向固定在传感器板102上,其中,功能图像传感器104的光轴与所述透镜组件的光轴重合,以保证功能图像传感器104与由所述多个透镜元件提供的成像平面精确对准。然而,所述多个透镜元件106、108、110、112、114可能分别包括不同方向的光轴,导致所述透镜组件的总光轴116可能过度偏离功能图像传感器104的光轴,从而使透镜组件的总光轴116很难或无法与功能图像传感器104的光轴精确对准。为此,如果总光轴116与功能图像传感器104的预期光轴预先对准,则所述透镜组件的光轴与功能图像传感器104的光轴之间能够更加精确地对准,以避免试图将互锁透镜架100固定在传感器板102时产生的过度偏离。
6.因此,发明一种用于对准透镜组件中包括的多个透镜元件的系统和方法以实现预期的所述透镜组件的总光轴116是有益的。这样能够确保功能图像传感器104相对于透镜组
件对准,以便在成品中获得最佳的图像质量。
技术实现要素:
7.鉴于此,本发明的目的在于试图提供一种用于对准透镜组件中包括的多个透镜元件的方法。
8.因此,本发明提供了一种用于对准透镜组件中包括的多个透镜元件的方法,所述方法包括以下步骤:将所述透镜组件分成包括至少一个透镜元件的第一透镜模块和包括至少一个另外的透镜元件的第二透镜模块;通过对准所述第一透镜模块中包括的至少一个透镜元件的光轴与所述第二透镜模块中包括的至少一个透镜元件的光轴来进行第一透镜模块和第二透镜模块之间的粗对准;当所述第一透镜模块和第二透镜模块位于测试图和图像传感器之间时,通过图像传感器查看测试图;在所述第一和第二透镜模块之间的不同的相对对准处,从所述测试图的图像传感器获得图像质量指数以进行第一透镜模块和第二透镜模块之间的精对准;然后,在所述第一透镜模块和第二透镜模块之间优化所述图像质量指数的相对对准处,将第一透镜模块固定在第二透镜模块上。
9.以下参考示出本发明具体的优选实施例的附图对本发明进行更详细地描述。附图和相关描述的特殊性不应理解为替代如权利要求书限定的本发明的广义认定的普遍性。
附图说明
10.现在将参考附图描述本发明提供的用于对准透镜元件的示例性过程。
11.图1为常规的包括组装在互锁透镜架中的多个透镜元件的透镜组件的横截面图。
12.图2为根据本发明优选实施例的透镜组件的横截面图,其中,透镜组件中的一个透镜元件从互锁透镜架中移除以实施对准过程。
13.图3a为用于测量互锁透镜架中包括的至少一个透镜元件的球面的光学检测器的等距视图;图3b为用于测量分离透镜元件的球面的光学检测器的等距视图。
14.图4a示出了测得的互锁透镜架中包括的透镜元件的球形轮廓;图4b示出了测得的分离透镜元件的球形轮廓。
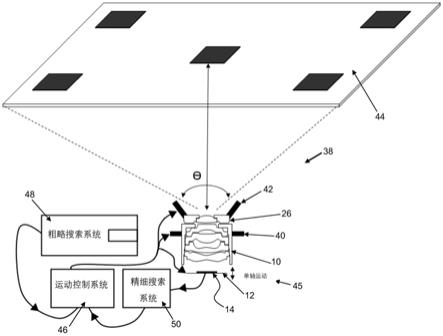
15.图5示出了根据本发明优选实施例的可用于执行对准过程的透镜对准设备的布局。
16.图6为示例性的对准过程的流程图。
17.图7示出了将粘合剂分散到互锁透镜架上的粘合剂分散器。
18.图8示出了在对准位置将分离透镜元件固定在互锁透镜架上。
具体实施方式
19.图2为根据本发明优选实施例的透镜组件的横截面图,其中,透镜组件中的一个透镜元件从互锁透镜架10中移除以实施对准过程。在所示的实施例中,整个透镜组件包括五个透镜元件16、18、20、22、24。所述五个透镜元件中的四个透镜元件16、18、20、22组装在互锁透镜架10中,其中,在功能图像传感器104与所述透镜组件中组合的透镜元件16、18、20、22对准后,互锁透镜架10用于固定在传感器板上,所述传感器板上具有功能图像传感器104。
20.如图2所示,在本实施例中,所述透镜组件中包括的其中一个透镜元件24从互锁透镜架10中分离,并且组装在单独的分离透镜架26上以形成单独的透镜模块。这使得分离透镜元件24可以相对于另一个透镜模块中的多个其他透镜元件16、18、20、22预对准,从而使所述透镜组件的总光轴28与功能图像传感器104的预期光轴尽可能的预对准。一般来说,由于整个透镜组件最终将会安装在传感器板上,所述传感器板上安装有成品形式的功能图像传感器,因此总光轴28应基本垂直于这种功能图像传感器104的图像平面。这将有助于保证所述透镜组件与功能图像传感器之间更精确的对准,该功能图像传感器将在组装好的照相机模块成品中与透镜元件一起使用。
21.为了以高生产率实现所述透镜组件的透镜元件16、18、20、22、24之间的这种对准,首先应进行所述透镜元件之间的粗对准。粗对准用于快速对准所述透镜组件中的分离透镜元件24的光轴与其余透镜元件的光轴,可以通过对透镜元件的多个表面进行光学检测实现粗对准。这种粗对准还应将光轴定向为基本垂直于照相机模块成品中的所述功能图像传感器的预期图像平面。然而,当这种粗对准用于实现各自光轴的近似对准时,由于其本身不够精确,随后应实施精对准以进行更高精度的对准。
22.关于所述粗对准的过程,图3a为用于测量互锁透镜架10中包括的至少一个透镜元件的球面的光学检测器30的等距视图。在本实施例中,由于互锁透镜架10包括四个单独的透镜元件16、18、20、22,为了提高生产率,仅测量位于互锁透镜架10顶端的透镜元件22。这种测量涉及透镜元件22两侧表面的球形轮廓的测量。因此,光学检测器30例如可以是三维扫描仪或激光调平传感器,这不仅能检查和测量与其正对的透镜元件22一侧的球形轮廓,还能“透视”透镜元件22以检查透镜元件22的相对一侧。
23.因此,在本实施例中,仅测量顶部透镜元件22的光轴,而忽略安装在互锁透镜架10中的所述透镜组件中的其余透镜元件16、18、20。当顶部透镜元件22与在互锁透镜架10中的其余透镜元件之间存在残余对准误差,随后在该过程中采用的精对准仍可在最终的主动对准过程中优化成像质量。然而,如果期望且周期时间不限定,则光学检测器30可能从顶部透镜元件22向远处看,进而测量互锁透镜架10中包括的每个所述的其他透镜元件16、18、20的球形轮廓。
24.除了测量互锁透镜架10中包括的顶部透镜元件22的表面之外,图3b为用于测量分离透镜元件24的球面的光学检测器30的等距视图。光学检测器30位于分离透镜元件24的一侧以检查和测量分离透镜元件24的面向光学检测器30的第一表面的球形轮廓,光学检测器30还用于穿过所述第一表面检查和测量分离透镜元件24的与第一表面相对的第二表面的球形轮廓。因此,对分离透镜元件24的球面两侧的测量相似。
25.图4a示出了测得的互锁透镜架10中包括的顶部透镜元件22的球形轮廓。获得了顶部透镜元件22的第一侧面的第一球形轮廓s1和第二侧面的第二球形轮廓s2。基于第一球形轮廓s1获得根据第一球形轮廓s1计算的第一球心c1。同样地,基于第二球形轮廓s2进一步获得根据第二球形轮廓s2计算的第二球心c2。因此,顶部透镜元件22的近似光轴32确定为穿过c1和c2的直线。
26.图4b示出了测得的组装在分离透镜架26上的分离透镜元件24的球形轮廓。获得分离透镜元件24的第一侧面的第一球形轮廓s1和第二侧面的第二球形轮廓s2。基于第一球形轮廓s1,获得根据第一球形轮廓s1计算的第一球心c1。同样地,基于第二球形轮廓s2,还能
获得根据第二球形轮廓s2计算的第二球心c2。因此,分离透镜元件24的近似光轴34确定为穿过c1和c2的直线。为了进行粗对准,顶部透镜元件22的光轴32应与分离透镜元件24的光轴34同轴布置,从而使光轴32和34同轴对准。
27.此外,在所述粗对准的过程中,每个透镜模块的光轴32和34还最应对准系统提供的基准点。基于此,调整所述两个透镜模块之间的相对光学移位与总光轴28以便对准用于执行aa的图像传感器的期望成像平面。
28.因此,粗略搜索系统利用光学方式来测量每个透镜表面的曲率,从而确定每个透镜表面的球心。基于各透镜元件22、24的两个透镜表面的球心c1、c2,可以确定各透镜元件22、24的光轴32、34。
29.图5示出了根据本发明优选实施例的用于执行对准过程的透镜对准设备38的布局。透镜对准设备38提供了一种快速对准两个透镜模块以实现透镜组件的最佳总体透镜成像质量的方案。
30.在所示的透镜对准设备38中,十二轴处理系统保持并操控第一透镜模块和第二透镜模块,并且可以在六个自由度(dof)内调整每个透镜模块(即,每个透镜模块在x,y,z和旋转方向上可调整)。总的来说,粗略搜索系统首先以微米级精度测量所述第一透镜模块和第二透镜模块的光轴32、34中的偏心移位,并测量在若干个弧分内的倾斜或旋转移位。根据测量反馈,所述处理系统能够在六个自由度内粗略地对准每个透镜模块。
31.其次,利用包括黄金镜像传感器(golden image sensor)和测试图的精确搜索系统来获得关于所述两个透镜模块的成像质量指数。由于所述精确搜索系统中的成像质量对所述两个透镜模块的亚微米级偏心移位和弧秒级倾斜移位的顺序敏感,因此所述处理系统能够根据成像质量的反馈以非常高的精度对准所述两个透镜模块。在两个透镜模块相对于彼此在最佳位置对准后,将粘合剂分散在所述透镜模块的连接表面上,使透镜模块彼此固定。
32.更详细地,透镜对准设备38具有用于抓取互锁透镜架10的第一抓取器40和用于抓取分离透镜架26的第二抓取器42。第一抓取器40和第二抓取器42分别能够在六个自由度内定向互锁透镜架10和分离透镜架26以对准组装在互锁透镜架10中的所述多个透镜元件和组装在分离透镜架26上的分离透镜元件24。因此,第一抓取器40和第二抓取器42使得透镜对准设备38在十二个自由度内操控和对准透镜元件16、18、20、22、24。
33.第一抓取器40和第二抓取器42可操作地与主控制系统46连接以控制其各自的运动。在粗略搜索期间,粗略搜索系统48在顶部透镜元件22的光轴32和分离透镜元件24的光轴34上提供数据以使主控制系统46指示第一抓取器40和第二抓取器42操控光轴32、34使其彼此同轴。为此,光学检测器30可分别位于所述第一透镜模块(包括互锁透镜架10中的多个所述透镜元件)和所述第二透镜模块(包括分离透镜架26)的上方,以测量如上所述的关于图3a、图3b、图4a和图4b的顶部透镜元件22和分离透镜元件24的球形表面轮廓s1、s2。
34.为了进行精对准,还提供了精细搜索成像系统50,其可操作地与主控制系统46连接。该精细搜索成像系统50与图像传感器14电连接,图像传感器14用于通过所述第一透镜模块和第二透镜模块中包括的透镜元件16、18、20、22、24查看或观察测试图44。测试图44被设置使从分离透镜元件24到测试图44的视场具有角度θ。
35.在所述精对准的过程中,精细搜索成像系统50生成与图像传感器14捕获的图像相
关的各种质量参数。这些质量参数可以包括但不限于光学传递函数(otf)、调制传递函数(mtf)、空间频率响应(sfr)、对比度传递函数(ctf)、电视线(tv line)或本领域已知的能够表示成像系统分辨率的任何其他评价方法。此外,为了获得更准确的质量参数,使用的图像传感器14应优选为黄金镜像传感器,其为已知的且优选为优质的标准传感器,并充当参考点以测量所有需要对准的透镜元件。
36.特别地,精细搜索成像系统50具有用于沿单轴朝向或远离测试图44移动的定位台45。图像传感器14位于定位台45上。在图5中,该移动用传感器板12的垂直单轴运动来表示。根据精细搜索成像系统50对图像传感器14的全焦扫描(through
‑
focus scanning),能够得到关于测试图44图像的多个成像质量曲线(例如mtf、sfr或相关的照明曲线等)。基于这些成像质量曲线,可以获得一定的透镜成像质量指数(例如峰值mtf、成像平面倾斜度、透镜场曲率倾斜度、矢状和切向的mtf峰值分离等)。
37.一般来说,每个透镜元件的设计都具有成像质量变化的特定的光学模型,其基于与所述第一透镜模块和第二透镜模块相关的偏心、倾斜和间隙移位。因此,根据上述的光学模型,即使是所述第一透镜模块和第二透镜模块之间的微小移位也可计算,并且可以使所述透镜模块相对于彼此进一步对准。
38.图6为示例性的对准过程的流程图。在步骤60中,包括第一抓取器40和第二抓取器42的处理系统保持第一透镜模块和第二透镜模块,其中,所述第一透镜模块包括组装在互锁透镜架10中的透镜元件16、18、20、22,在本实施例中,分离透镜元件24组装在分离透镜架26上。在步骤62中,光学检测器30在如上所述的粗对准过程中测量顶部透镜元件22的光轴32和分离透镜元件24的光轴34。
39.在步骤64中,如果光轴32、34没有轴向对准到预定的规格内,则在步骤66中,所述处理系统进一步调整透镜元件22、24使透镜元件的光轴在再次对对准进行检查之前更好地对准。一旦确定了所述粗对准在预定的规格内,在步骤68中,所述处理系统在进行精细搜索的过程中测量透镜成像质量指数。所述透镜成像质量指数可以包括一个或多个如上所述的由图像传感器14捕获的质量参数。
40.在步骤70中,第一抓取器40和第二抓取器42基于已获得的透镜成像质量指数对透镜元件22、24进行相对于彼此的移动和调整。在步骤72中,确定透镜元件22、24之间的相互移位(inter
‑
shifts)是否使所述图像质量满足预定的质量要求。如果不满足,则在步骤74中,所述处理系统将在再次检查透镜元件22、24之间的相互移位是否使所述图像质量满足预定的质量要求之前进一步对透镜元件22、24进行相对于彼此的精对准。
41.在步骤76中,一旦获得了期望的图像质量,在所述第一透镜模块和第二透镜模块之间分散粘合剂,例如胶水。在步骤78中,通过固化使所述透镜模块彼此固定后,组装完成(步骤80)。
42.图7示出了将粘合剂92分散到互锁透镜架10上的粘合剂分散器90。粘合剂92可以是紫外线活性粘合剂(ultra
‑
violet light
‑
activated adhesive)。在图8中,通过将分离透镜架26放置在粘合剂92上使组装在分离透镜架26上的分离透镜元件24与其他透镜元件16、18、20、22固定。如果粘合剂92为紫外线活性粘合剂,通过使用紫外线照明系统94固化粘合剂92,使分离透镜架26和互锁透镜架10之间的粘合凝固(分离透镜元件24处于对准位置)。
43.综上所述,根据本发明的对准方法提供了一种用于快速对准组合构成透镜组件的第一透镜模块和第二透镜模块的系统方法。所述方法提出了具有双路径对准方式的硬件系统,以及包括两个六轴运动系统的处理系统,所述两个六轴运动系统分别对所述第一透镜模块和所述第二透镜模块进行相对于彼此的保持和操控。双路径对准方式结合粗略搜索过程和精细搜索过程快速对准所述两个透镜模块在x、y、z方向和旋转方向上的相对位置。所述粗略搜索系统以亚毫米级到微米级的精度快速测量和对准所述两个透镜模块的光轴。所述精确搜索系统包括测试图和黄金镜像传感器14,其中,黄金镜像传感器14安装在用于测量透镜成像质量的定位台上,并根据获得的成像质量指数进行闭环反馈。因此,对准精度能够进一步提高至亚微米级的精度。最后,采用粘合剂应用系统将粘合剂(例如,紫外胶或紫外热胶)分散在所述各自透镜模块的连接表面之间。为了固化所述胶水,使用紫外线照明系统94固化两个透镜模块的所述连接表面上的胶水,以完成所述透镜组件的构造。
44.应当理解的是,如上所述的根据本发明实施例的方法具有提高良率、精度和速度的益处。
45.在传统的透镜组装工艺中,透镜系统具有大量透镜元件的设计导致良率的降低,与其相比,本发明的方法可实现良率的提高。本发明的方法能够通过实施包括精确测量透镜成像质量的aa工艺显著地提高良率。
46.由于从黄金镜像传感器14获得的成像质量能够显示所述第一透镜模块和第二透镜模块之间轻微的未对准,因此提高了精度。此外,包括沿至少一个运动轴进行全焦扫描方式的透镜对准设备38的所述十二轴处理系统提供了高精度的运动和足够的自由度(dof)以调整所述第一和第二透镜模块之间的任何未对准。
47.此外,所述双路径对准方式可对所述第一透镜模块和第二透镜模块进行快速的粗对准,并在此期间测量和对准各自透镜元件的光轴。这种对每个透镜元件的光轴32、34的粗略搜索仅需要捕获一个图像,并且能够在一个较短的图像捕获时间范围内有效完成。由于所述粗略搜索系统不需要所述透镜额外移动(例如旋转或扫描)以测量所述光轴,这部分对准能够比传统的用于对准多个透镜元件的方式更快地完成,而随后进行的精细搜索使所述对准更加精确。
48.除以上具体描述的内容外,还可以对本文所描述的本发明进行变化、修改和/或添加。并且应当理解的是,本发明包括所有这样的变化、修改和/或添加,而这些变化、修改和/或添加均落入上述本发明的精神和范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。