1.本发明实施例涉及半导体制造领域,尤其涉及一种移动机构及其形成方法、驱动方法、电子设备和成像装置。
背景技术:
2.在一些电子终端中,通常会需要让其中的某些部件发生平移、竖直移动或者倾斜,进而实现某些特殊功能,例如:实现光学防抖(optical image stabilization,ois)、超分辨(super-resolution,sr)。
3.光学防抖是依靠特殊的镜头或者感光元件最大程度的降低操作者在使用过程中由于抖动或者物体发生移动造成影像不稳定。目前一种光学防抖技术通常是在镜头内的陀螺仪侦测到微小的移动,并且会将信号传至微处理器立即计算需要补偿的位移量,然后通过补偿镜片组,根据抖动方向及位移量加以补偿,从而有效的克服因相机的振动产生的影像模糊。
4.还有一些光学防抖技术是在一些具有镜头模组的摄像机、照相机和手机等各种电子终端中,通常会通过vcm马达(voice coil actuator/voice coil motor,音圈马达)等驱动机构来使得可移动透镜,在光轴方向上位移以聚焦或变焦,或者,在垂直于光轴方向的方向上位移以防止光学抖动。
5.图像超分辨率重建技术是利用一组低质量、低分辨率图像(或运动序列)来产生单幅高质量、高分辨率的图像。图像超分辨率重建应用领域及其宽广,在军事、医学、公共安全、计算机视觉等方面都存在着重要的应用前景。在计算机视觉领域,图像超分辨率重建技术有可能使图像实现从检出水平向识别水平的转化,或更进一步实现向细辨水平的转化。
技术实现要素:
6.本发明实施例解决的问题是提供一种移动机构及其形成方法、驱动方法、电子设备和成像装置,提高移动机构的移动精度。
7.为解决上述问题,本发明实施例提供一种移动机构,包括:固定平台,与所述固定平台的表面相平行的方向为横向,与所述固定平台的表面相垂直的方向为纵向;横向驱动电极,位于所述固定平台上;横向可动电极,相对于所述横向驱动电极横向排布且具有第一预设间距,所述横向驱动电极和所述横向可动电极能够静电吸合;第一纵向驱动电极,位于所述固定平台上;纵向可动电极,相对于所述第一纵向驱动电极纵向排布,所述第一纵向驱动电极和所述纵向可动电极能够静电吸合,其中,所述横向可动电极与所述纵向可动电极相连接;导线,所述导线的一端固定,另一端与所述横向可动电极或所述纵向可动电极固定电性连接,且支撑所述横向可动电极和所述纵向可动电极能够处于悬空状态;可移动平台,用于支撑被移动部件,所述可移动平台具有第一接合部;第二接合部,在所述纵向上与所述第一接合部相对设置,所述第二接合部与所述横向可动电极或所述纵向可动电极固定连接;其中,所述第一接合部与所述第二接合部能够分离或接合。
8.相应的,本发明实施例还提供一种移动机构的形成方法,包括:提供固定平台,包括工作区;在所述工作区的所述固定平台上形成第一纵向驱动电极;在所述工作区的所述固定平台上形成与所述第一纵向驱动电极相隔离的支撑柱;在所述支撑柱的侧面形成横向驱动电极;形成保形覆盖所述支撑柱、横向驱动电极和第一纵向驱动电极的第一牺牲层,位于所述横向驱动电极侧面的所述第一牺牲层的厚度为第一预设间距;形成位于所述第一牺牲层上的第一导电层,所述第一导电层包括一端固定的导线、与所述第一纵向驱动电极相对且连接所述导线的纵向可动电极、与所述横向驱动电极相对且连接所述纵向可动电极的横向可动电极、以及位于所述支撑柱上方且连接所述横向可动电极的第二接合部;形成覆盖所述第一导电层和第一牺牲层的第二牺牲层;在所述第二牺牲层上形成可移动平台,所述可移动平台具有第一接合部,所述第一接合部与第二接合部能够分离或接合;形成所述可移动平台后,去除所述第二牺牲层和第一牺牲层。
9.相应的,本发明实施例还提供一种前述的移动机构的驱动方法,包括:执行初始驱动处理,使所述横向可动电极、纵向可动电极、第一纵向驱动电极和横向驱动电极处于浮接状态,并使所述第一接合部与第二接合部接合;在执行所述初始驱动处理之后,执行一次或多次的位移处理,所述位移处理的步骤包括:执行第一子位移处理,向所述横向可动电极加载第一驱动信号,向与所述横向可动电极相对的所述横向驱动电极加载第二驱动信号,使所述横向驱动电极与所述横向可动电极之间具有第一静电吸引力,所述第一静电吸引力用于使所述横向驱动电极和所述横向可动电极静电吸合;在执行所述第一子位移处理后,执行第二子位移处理,固定所述可移动平台,向所述纵向可动电极加载第三驱动信号,向所述第一纵向驱动电极加载第四驱动信号,并向被加载所述第二驱动信号的所述横向驱动电极加载第五驱动信号,使所述横向驱动电极与所述横向可动电极脱离,并使所述纵向可动电极和所述第一纵向驱动电极之间具有第二静电吸引力,所述第二静电吸引力用于使所述第一纵向驱动电极和所述纵向可动电极静电吸合,且使所述第一接合部与第二接合部分离;在执行所述第二子位移处理后,执行第三子位移处理,向所述纵向可动电极加载第六驱动信号,向所述第一纵向驱动电极加载第七驱动信号,并使所述横向驱动电极处于浮接状态,用于使所述纵向可动电极和第一纵向驱动电极脱离,所述横向可动电极和纵向可动电极回弹,并使所述第一接合部与第二接合部接合。
10.相应的,本发明实施例还提供一种电子设备,包括:被移动部件;本发明实施例提供的移动机构。
11.相应的,本发明实施例还提供一种成像装置,包括:本发明实施例提供的移动机构;被移动部件,固定于所述可移动平台上,所述被移动部件为图像传感器。
12.与现有技术相比,本发明实施例的技术方案具有以下优点:
13.本发明实施例提供的移动机构包括:位于固定平台上的横向驱动电极和第一纵向驱动电极;相对于横向驱动电极横向排布且具有第一预设间距的横向可动电极,所述横向驱动电极和所述横向可动电极能够静电吸合;相对于所述第一纵向驱动电极纵向排布的纵向可动电极,所述第一纵向驱动电极和所述纵向可动电极能够静电吸合,所述横向可动电极与所述纵向可动电极相连接;导线,所述导线的一端固定,另一端与所述横向可动电极或所述纵向可动电极固定电性连接,且支撑所述横向可动电极和所述纵向可动电极能够处于悬空状态;可移动平台,用于支撑被移动部件,所述可移动平台具有第一接合部;第二接合
部,在纵向上与所述第一接合部相对设置,所述第二接合部与所述横向可动电极或所述纵向可动电极固定连接,其中,所述第一接合部与第二接合部能够分离或接合;在移动机构用于移动被移动部件的过程中,在第一接合部与第二接合部接合的情况下,当所述横向驱动电极和横向可动电极静电吸合时,相应使得横向可动电极向相对应的横向驱动电极移动,从而使所述横向可动电极横向移动第一预设间距,所述横向可动电极相应带动可移动平台横向移动第一预设间距,随后,固定所述可移动平台,并使所述第一纵向驱动电极和纵向可动电极静电吸合,第一纵向驱动电极下拉所述纵向可动电极和横向可动电极,使得所述第一接合部与第二接合部分离,因此,当第一纵向驱动电极呈浮接状态时,横向可动电极和纵向可动电极在导线的作用下回弹至初始位置,并重新使所述第一接合部与第二接合部接合;综上,单次移动的操作使可移动平台移动第一预设间距,从而提高了所述移动机构的移动精度,而且,通过往复进行移动、下拉和归位的操作,使可移动平台发生周期性的小步长移动累积以实现较大的位移,因此,还使得本发明提供的移动机构具有行程大的优点。
14.本发明实施例还提供一种成像装置,所述成像装置包括本发明实施例提供的移动机构以及固定于可移动平台上的被移动部件,所述被移动部件为图像传感器;与移动镜头组的方式相比,图像传感器的尺寸更小、重量更低,通过移动图像传感器实现光学防抖,有利于节约成本、提高光学防抖的便利性和稳定性,而且,所述移动机构工作时,单次移动的操作使可移动平台移动第一预设间距,所述移动机构具有行程大、移动精度高、速度快的优点,从而有利于实现对图像传感器的精密平移,以实现超分辨,同时提高所述成像装置用于光学防抖的有效性和精确性,相应提高成像质量。
附图说明
15.图1是本发明移动机构第一实施例的俯视图;
16.图2是本发明移动机构第一实施例的剖视图;
17.图3是图2中第二啮合部的一实施例的俯视图;
18.图4是本发明移动机构第二实施例中第二啮合部的俯视图;
19.图5是本发明移动机构第三实施例的俯视图;
20.图6是本发明移动机构第四实施例的剖视图;
21.图7是本发明移动机构第五实施例的剖视图;
22.图8是本发明移动机构第六实施例的剖视图;
23.图9是本发明移动机构第七实施例的剖视图;
24.图10是本发明移动机构第八实施例的剖视图;
25.图11至图25是本发明移动机构的形成方法第一实施例中各步骤对应的结构示意图;
26.图26至图27是本发明移动机构的形成方法第二实施例中各步骤对应的结构示意图;
27.图28至图29是本发明移动机构的形成方法第三实施例中各步骤对应的结构示意图;
28.图30是本发明移动机构的形成方法第四实施例中各步骤对应的结构示意图;
29.图31是本发明电子设备一实施例的示意图。
具体实施方式
30.由背景技术可知,目前的一种光学防抖方法是通过移动镜头的方式,使得镜头能够对物体成像点发生的位移进行补偿,进而实现光学防抖。但是,镜头的体积和重量通常均较大,通过使镜头发生位移的方式实现光学防抖也越来越困难。而且,目前的移动机构或驱动机构难以实现具有较大行程和较高精度的平移。
31.为了解决所述技术问题,本发明实施提供一种移动机构,包括:固定平台,与所述固定平台的表面相平行的方向为横向,与所述固定平台的表面相垂直的方向为纵向;横向驱动电极,位于所述固定平台上;横向可动电极,相对于所述横向驱动电极横向排布且具有第一预设间距,所述横向驱动电极和所述横向可动电极能够静电吸合;第一纵向驱动电极,位于所述固定平台上;纵向可动电极,相对于所述第一纵向驱动电极纵向排布,所述第一纵向驱动电极和所述纵向可动电极能够静电吸合,其中,所述横向可动电极与所述纵向可动电极相连接;导线,所述导线的一端固定,另一端与所述横向可动电极或所述纵向可动电极固定电性连接,且支撑所述横向可动电极和所述纵向可动电极能够处于悬空状态;可移动平台,用于支撑被移动部件,所述可移动平台具有第一接合部;第二接合部,在纵向上与所述第一接合部相对设置,所述第二接合部与所述横向可动电极或所述纵向可动电极固定连接;其中,所述第一接合部与第二接合部能够分离或接合。
32.本发明实施例在移动机构用于移动被移动部件的过程中,在第一接合部与第二接合部接合的情况下,当所述横向驱动电极和横向可动电极静电吸合时,相应使得横向可动电极向相对应的横向驱动电极移动,从而使所述横向可动电极横向移动第一预设间距,所述横向可动电极相应带动可移动平台横向移动第一预设间距,随后,固定所述可移动平台,并使所述第一纵向驱动电极和纵向可动电极静电吸合,第一纵向驱动电极下拉所述纵向可动电极和横向可动电极,使得所述第一接合部与第二接合部分离,因此,当第一纵向驱动电极呈浮接状态时,横向可动电极和纵向可动电极在导线的作用下回弹至初始位置,并重新使所述第一接合部与第二接合部接合;综上,单次移动的操作使可移动平台移动第一预设间距,从而提高了所述移动机构的移动精度,而且,通过往复进行移动、下拉和归位的操作,使可移动平台发生周期性的小步长移动累积以实现较大的位移,因此,还使得本发明提供的移动机构具有行程大的优点。
33.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
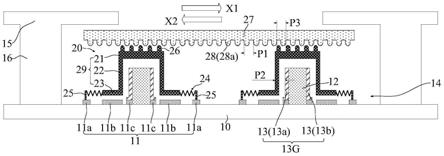
34.结合参考图1至图3,图1是本发明移动机构第一实施例的俯视图,图2是本发明移动机构第一实施例的剖视图,图3是图2中第二啮合部的一实施例的俯视图。
35.其中,为了便于图示,图1仅示意出了固定平台、位移模块和可移动平台,图2仅示意出了两个位移模块。
36.本发明实施例提供的移动机构用于沿横向(即平行于固定平台10表面的方向)移动被移动部件。
37.所述移动机构包括:固定平台10,与所述固定平台10的表面相平行的方向为横向,与所述固定平台10的表面相垂直的方向为纵向;横向驱动电极13,位于所述固定平台10上;横向可动电极22,相对于所述横向驱动电极13横向排布且具有第一预设间距p2,所述横向驱动电极13和横向可动电极22能够静电吸合;第一纵向驱动电极11b,位于所述固定平台10
上;纵向可动电极23,相对于所述第一纵向驱动电极11b纵向排布,所述第一纵向驱动电极11b和所述纵向可动电极23能够静电吸合,其中,所述横向可动电极22与所述纵向可动电极23相连接;导线24,所述导线24的一端固定,另一端与所述横向可动电极22或所述纵向可动电极23固定电性连接,且支撑所述横向可动电极22和所述纵向可动电极23能够处于悬空状态;可移动平台27,用于支撑被移动部件,所述可移动平台27具有第一接合部28;第二接合部21,在纵向上与所述第一接合部28相对设置,所述第二接合部21与所述横向可动电极22或所述纵向可动电极23固定连接;其中,所述第一接合部28与第二接合部21能够分离或接合。
38.在本实施提供的移动机构的工作过程中,在第一接合部28与第二接合部21接合的情况下,当所述横向驱动电极13和横向可动电极22静电吸合时,相应使得横向可动电极22向相对应的横向驱动电极13移动,从而使所述横向可动电极22横向移动第一预设间距p2,所述横向可动电极22相应带动可移动平台27横向移动第一预设间距p2,随后,固定所述可移动平台27,并使所述第一纵向驱动电极11b和纵向可动电极23静电吸合,第一纵向驱动电极11b下拉所述纵向可动电极23和横向可动电极22,使得所述第一接合部28与第二接合部21分离,因此,当第一纵向驱动电极11b呈浮接状态时,横向可动电极22和纵向可动电极23在导线24的作用下回弹至初始位置,并重新使所述第一接合部28与第二接合部21接合;综上,单次移动的操作使可移动平台27移动第一预设间距p2,从而提高了所述移动机构的移动精度,而且,通过往复进行移动、下拉和归位的操作,使可移动平台27发生周期性的小步长移动累积以实现较大的位移,因此,还使得本发明提供的移动机构具有行程大的优点。
39.固定平台10用于为移动机构移动被移动部件提供平台。
40.本实施例中,所述固定平台10为衬底。在其他实施例中,所述固定平台还可以为其他功能结构。具体地,所述衬底可以为半导体衬底,所述衬底可以通过半导体制造工艺形成。作为一种示例,所述衬底为硅衬底。在其他实施例中,所述衬底的材料还可以为锗、锗化硅、碳化硅、砷化镓或镓化铟等其他材料。
41.所述横向驱动电极13位于固定平台10上,所述横向可动电极22相对于横向驱动电极13横向排布,所述横向驱动电极13和横向可动电极22能够静电吸合,从而驱动相对应的横向可动电极22沿横向移动第一预设间距p2,相应带动可移动平台27沿横向移动移动第一预设间距p2,进而使可移动平台27发生微小的位移。
42.本实施例中,横向驱动电极13的材料为导电材料,以便于对横向驱动电极13施加驱动信号。具体地,横向驱动电极13的材料为掺杂有离子的半导体材料(例如,掺杂有离子的多晶硅),从而与半导体制造工艺相兼容,有利于批量化生产以及降低工艺成本。在其他实施例中,横向驱动电极的材料还可以为金属材料,所述金属材料包括铝、铜或钨。
43.本实施例中,所述横向可动电极22的材料为导电材料,例如为金属材料或掺杂有离子的半导体材料。对横向可动电极22的材料的描述,可参考前述对横向驱动电极13的相应描述,在此不再赘述。
44.所述第一预设间距p2用于控制移动机构单次移动的步长。其中,根据移动机构的移动行程和移动精度的需求,合理设定第一预设间距p2,且第一预设间距p2越小,移动精度越高。
45.需要说明的是,所述移动机构还包括:第二电极引脚11c,位于固定平台10上,横向
驱动电极13与第二电极引脚11c一一对应并相连。横向驱动电极13与第二电极引脚11c实现电连接,从而通过第二电极引脚11c对相对应的横向驱动电极13加载驱动信号。
46.本实施例中,第二电极引脚11c的材料为导电材料。具体地,所述第二电极引脚11c的材料为金属材料,所述金属材料包括铝、铜或钨。在其他实施例中,第二电极引脚的材料还可以为为掺杂有离子的半导体材料。
47.本实施例中,所述移动机构还包括:支撑柱12,位于固定平台10上。相应的,所述横向驱动电极13固定于支撑柱12的侧面。所述支撑柱12用于为横向驱动电极13起到支撑作用,从而提高横向驱动电极13的机械强度和稳定性。
48.作为一种示例,所述支撑柱12为条型结构,支撑柱12具有延伸方向,且与支撑柱12的延伸方向相垂直的方向上,支撑柱12具有相对的两个侧面,同一支撑柱12的相对的两个侧面上分别设有横向驱动电极13。
49.具体地,位于同一支撑柱12上的横向驱动电极13构成横向驱动电极组13g。作为一种示例,所述支撑柱12与横向驱动电极组13g一一对应。
50.相应的,所述支撑柱12还用于为位于其侧面的横向驱动电极13起到电隔离的作用,便于分别对位于其侧面的横向驱动电极13施加驱动信号。
51.在其他实施例中,支撑柱还可以为多边形结构,支撑柱包括与多边形的每条边对应的多个侧面。相应地,支撑柱的任意一个侧面上设有横向驱动电极,或者,支撑柱的多个侧面分别设有横向驱动电极,从而使可移动平台在多个横向上均可发生位移。
52.本实施例中,支撑柱12的材料为介质材料。作为一种示例,支撑柱12的材料为氮化硅。氮化硅的绝缘性能较佳,且氮化硅的硬度较大,有利于提高支撑柱12的机械强度。在另一些实施例中,支撑柱的材料还可以为氧化硅或氮氧化硅等其他合适的介质材料。支撑柱可以通过半导体工艺形成。
53.在其他实施例中,支撑柱也可以包括:导电柱;介质层,覆盖支撑柱的侧面。相应的,导电柱和横向驱动电极之间通过介质层实现电隔离,从而也能使支撑柱用于对横向驱动电极起到电隔离的作用。其中,导电柱的材料可以为金属材料或掺杂有离子的半导体材料;介质层的材料可以为氮化硅、氧化硅或氮氧化硅等其他合适的介质材料。
54.所述第一纵向驱动电极11b位于固定平台10上,所述纵向可动电极23位于第一纵向驱动电极11b上方且相对于第一纵向驱动电极11b纵向排布,且所述横向可动电极22与纵向可动电极23相连接,因此,纵向可动电极23沿纵向发生移动时,相应带动横向可动电极22沿纵向发生移动。
55.具体地,在移动机构的工作过程中,横向可动电极22带动可移动平台27横向移动第一预设间距p2后,固定所述可移动平台27,并使所述第一纵向驱动电极11b和纵向可动电极23静电吸合,从而使得所述第一接合部28与第二接合部21分离。因此,当第一纵向驱动电极11b呈浮接状态时,横向可动电极22和纵向可动电极23在导线24的作用下回弹至初始位置,并重新使所述第一接合部28与第二接合部21接合,从而完成一次移动操作,使可移动平台27沿横向移动第一预设间距,并为下一次带动可移动平台27沿横向移动做准备。
56.本实施例中,第一纵向驱动电极11b的材料为导电材料,例如为金属材料或掺杂有离子的半导体材料。对第一纵向驱动电极11b的材料的描述,可参考前述对横向驱动电极13的相应描述,在此不再赘述。
57.所述导线24用于支撑横向可动电极22和纵向可动电极23能够处于悬空状态,从而使横向可动电极22和纵向可动电极23能够发生移动。
58.而且,所述导线24的一端固定,另一端与横向可动电极22或纵向可动电极23固定电性连接,从而使所述横向可动电极22和纵向可动电极23均能够实现移动和归位,且还能够通过导线24对横向可动电极22或纵向可动电极23加载驱动信号。
59.此外,所述导线24具有弹性,所述导线24既能够发生拉伸形变,又能够发生压缩形变,从而使横向可动电极22或纵向可动电极23实现可移动的性能;后续使横向可动电极22和纵向可动电极23归位时,导线24能够回弹到原状,从而带动横向可动电极22和纵向可动电极23回弹至初始位置。
60.所述导线24具有一定的宽度,从而使导线24具有一定的机械强度,从而能够支撑横向可动电极22和纵向可动电极23。
61.所述导线24的材料为导电材料。本实施例中,所述导线24的材料为金属材料或掺杂有离子的半导体材料,所述金属材料包括铝、铜或钨。其中,导线24利用半导体工艺所形成,且上述材料的导线24较硬,从而使导线24具有一定的机械强度。
62.本实施例中,所述导线24为弹簧导线,从而具备可伸缩性能。具体地,所述导线24为z字型弹簧导线。在其他实施例中,导线也可以为m型弹簧导线或u型弹簧导线。
63.所述可移动平台27用于支撑被移动部件,从而在可移动平台27发生移动时,能够带动被移动部件移动,使被移动部件发生位移。本实施例中,可移动平台27指的是能够移动的平台。
64.本实施例中,所述可移动平台27具有第一接合部28,所述移动机构还包括第二接合部21,在纵向上与第一接合部28相对设置,所述第二接合部21与横向可动电极22和纵向可动电极23固定连接;其中,所述第一接合部28与第二接合部21能够分离或接合。
65.所述第二接合部21与横向可动电极22或纵向可动电极23固定连接,且所述第一接合部28与第二接合部21能够接合,从而通过横向可动电极22的移动,带动可移动平台27发生移动。而且,通过使所述第一接合部28与第二接合部21接合,还能够改善或避免在非工作状态下,可移动平台27发生无定态游荡的问题,从而进一步精确控制被移动部件的位移。
66.所述第一接合部28与第二接合部21能够分离,从而使所述横向可动电极22和纵向可动电极23回弹至初始位置。
67.所述第一接合部28包括第一啮合部28a,所述第一啮合部28a包括凸起或凹陷,所述第二接合部21包括能够与所述第一啮合部28a相啮合的第二啮合部26,所述第二啮合部26包括凸起或凹陷。
68.通过所述第一啮合部28a和第二啮合部26,能够使第二接合部21和可移动平台27相啮合,从而实现物理锁位。
69.相应的,移动机构在非工作状态下,即无需进行移动时,使得所有的第二接合部21与可移动平台27相啮合,保证牢固的锁位,从而改善或避免在非工作状态下,可移动平台27发生无定态游荡的问题。
70.图3是第二啮合部26的一实施例的俯视图。本实施例中,第二啮合部26呈阵列式排布。相应的,所述第一啮合部28a也呈阵列式排布。
71.通过使第一啮合部28a和第二啮合部26均呈阵列式排布,从而便于横向可动电极
22能够在多个横向上实现移动,进而使可移动平台27在多个横向上均可发生位移。
72.本实施例中,第二啮合部26的材料为介质材料。即使第二啮合部26的材料为介质材料,也能够使第二接合部21和可移动平台27相啮合。具体地,第二啮合部26的材料可以为氮化硅、氧化硅或氮氧化硅等合适的介质材料。第二啮合部26通过半导体工艺形成。
73.在其他实施例中,第二啮合部的材料也可以为导电材料,便于使第二接合部和第一接合部通过静电吸合的方式实现静电锁位。其中,导电材料可以为金属材料或掺杂有离子的半导体材料。
74.本实施例中,第一啮合部28a的材料为介质材料。即使第一啮合部28a的材料为介质材料,也能够使第二接合部21和可移动平台27相啮合。具体地,第一啮合部28a的材料可以为氮化硅、氧化硅或氮氧化硅等合适的介质材料。第一啮合部28a通过半导体工艺形成。
75.在其他实施例中,第一啮合部的材料也可以为导电材料,便于使第二接合部和第一接合部通过静电吸合的方式实现静电锁位。其中,导电材料可以为金属材料或掺杂有离子的半导体材料。
76.如图2所示,相邻所述第一啮合部28a的间距p1、以及相邻所述第二啮合部26a的间距p3均为第二预设间距(未标示),从而使第一啮合部28a能够与第二啮合部26相啮合。
77.本实施例中,所述第一预设间距p2为所述第二预设间距的整数倍,从而能够在横向可动电极22和纵向可动电极23归位后,使第一啮合部28a仍能够与下一个步长所对应的第二啮合部26相啮合,从而使得第一接合部28与第二接合部21重新实现物理锁位。
78.本实施例中,所述横向可动电极22的一端连接所述纵向可动电极23,另一端连接所述第二接合部21,从而实现纵向可动电极23、横向可动电极22和第二接合部21的联动,并实现三者之间的电连接。
79.具体地,所述第二接合部21两端沿横向分别连接有所述横向可动电极22,所述横向可动电极22分别连接有所述纵向可动电极23,所述纵向可动电极23分别连接有所述导线24,从而使所述纵向可动电极23、横向可动电极22和第二接合部21构成几字型的可动电极29。
80.本实施例中,所述可动电极29与横向驱动电极组13g一一对应,从而使横向驱动电极组13g位于可动电极29围成的空间中。
81.本实施例中,所述移动机构还包括:固定电极25,位于所述固定平台10上;所述导线24与固定电极25相连。
82.固定电极25用于使导线24的一端固定,还用于与横向可动电极22和纵向可动电极23实现电连接,从而通过固定电极25对横向可动电极22和纵向可动电极23加载驱动信号。
83.本实施例中,固定电极25与导线24一一对应。固定电极25的材料为导电材料。具体地,固定电极25的材料为金属材料或掺杂有离子的半导体材料,金属材料包括铝、铜或钨。
84.本实施例中,所述移动机构还包括:位于固定平台10上的第一电极引脚11a,固定电极25与第一电极引脚11a一一对应并相连。固定电极25与第一电极引脚11a实现电连接,从而通过第一电极引脚11a对固定电极25加载驱动信号。
85.本实施例中,第一电极引脚11a的材料为导电材料。具体地,第一电极引脚11a的材料为金属材料,所述金属材料包括铝、铜或钨。在其他实施例中,第一电极引脚的材料还可以为掺杂有离子的半导体材料。
86.本实施例中,所述横向可动电极22、纵向可动电极23、导线24和固定电极25为一体型结构,从而提高连接强度和机械强度,而且,在移动机构的形成过程中,可以在同一制程中同时形成横向可动电极22、纵向可动电极23、导线24和固定电极25,相应降低了形成移动机构的工艺复杂度。在另一些实施例中,横向可动电极、纵向可动电极、导线和固定电极还可以不为一体型结构。
87.需要说明的是,所述移动机构还包括:第一绝缘层(图未示),位于所述第一纵向驱动电极11b的顶面。第一绝缘层能够对第一纵向驱动电极11b和纵向可动电极23之间起到绝缘的作用,从而在移动机构工作时,当第一纵向驱动电极11b和纵向可动电极23之间具有电位差时,第一纵向驱动电极11b和纵向可动电极23之间产生静电吸引力,且第一纵向驱动电极11b和纵向可动电极23之间不会短路。
88.本实施例中,第一绝缘层的材料为氮化硅。在其他实施例中,绝缘层的材料还可以为氧化硅或氮氧化硅等合适的绝缘材料。
89.还需要说明的是,所述移动机构还包括:第二绝缘层(图未示),位于横向驱动电极13的侧壁;或者,第三绝缘层(图未示),位于横向可动电极22朝向横向驱动电极13的侧面。
90.以第二绝缘层为例,第二绝缘层用于实现横向可动电极22和横向驱动电极13之间的绝缘,从而在移动机构工作时,当横向可动电极22和横向驱动电极13之间具有电位差时,横向可动电极22和横向驱动电极13之间产生静电吸引力,且横向可动电极22和横向驱动电极13之间不会短路。同理,第三绝缘层也用于实现横向可动电极22和横向驱动电极13之间的绝缘。
91.第二绝缘层和第三绝缘层的材料为介质材料。本实施例中,第二绝缘层和第三绝缘层的材料为氮化硅。在其他实施例中,第二绝缘层和第三绝缘层的材料还可以为氧化硅、氮氧化硅等其他合适的介质材料。
92.本实施例中,所述移动机构包括多个相隔离的位移模块20,所述位移模块20包括所述横向驱动电极13、横向可动电极22、第一纵向驱动电极11b、纵向可动电极23以及导线24,所述移动机构中的多个所述位移模块20在固定平台10上呈阵列式排布。
93.所述位移模块20用于驱动可移动平台27沿横向发生平移。
94.其中,所述移动机构中的多个所述位移模块20在固定平台10上呈阵列式排布,以便于使移动机构能够在不同方向上对被移动部件实现平移,从而提高所述移动机构的使用灵活性。
95.例如,部分位移模块20用于驱动可移动平台27沿第一横向发生位移,剩余的位移模块20用于驱动可移动平台27沿第二横向发生位移,所述第一横向与第二横向相垂直。在其他实施例中,根据移动机构的使用需求,多个位移模块在固定平台上还可以为其他类型的排布方式。
96.作为一种示例,多个所述位移模块20中的所述横向驱动电极13与横向可动电极22的相对方向均相同,从而使可移动平台27实现一维平面的移动。
97.在其他实施例中,多个所述位移模块中的所述横向驱动电极与横向可动电极的相对方向相互垂直。具体地,部分位移模块用于驱动可移动平台沿第一横向发生位移,剩余的位移模块用于驱动可移动平台沿第二横向发生位移,所述第一横向与第二横向相垂直,相应的,部分的位移模块中的横向驱动电极与横向可动电极的相对方向与第一横向相同,剩
余位移模块中的横向驱动电极与横向可动电极的相对方向与第二横向相同。
98.作为一种示例,在所述横向驱动电极组13g中,一个横向驱动电极13为第一横向驱动电极13a,另一侧的横向驱动电极13为第二横向驱动电极13b,第一横向驱动电极13a用于驱动相对应的横向可动电极22沿第一平移方向(如图2中x1方向)发生位移,第二横向驱动电极13b用于驱动相对应的横向可动电极22沿第二平移方向(如图2中x2方向所示)发生位移,从而使横向可动电极22能够沿第一平移方向和第二平移方向实现移动。其中,第一平移方向和第二平移方向相反,从而带动可移动平台27左右移动。
99.本实施例中,移动机构还包括:围壁结构16,位于固定平台10上,围壁结构16围成空腔14,横向可动电极22和可移动平台27位于空腔14中。
100.所述围壁结构16用于限定可移动平台27沿横向的可移动范围,围壁结构16还用于对横向可动电极22和可移动平台27起到保护的作用,防止横向可动电极22和可移动平台27受到外界环境的影响。
101.本实施例中,移动机构还包括:顶部限位结构15,位于围壁结构16远离所述固定平台10的一端,且悬空延伸至可移动平台27的部分区域上。
102.顶部限位结构15用于限定可移动平台27沿纵向的可移动范围。
103.图4是本发明移动机构第二实施例中第二啮合部的俯视图。
104.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:第二啮合部26a为齿条。
105.相应的,第一啮合部也为齿条,且第一啮合部和第二啮合部26a的齿条的延伸方向相同。
106.需要说明的是,在其他实施例中,移动机构的移动方向包括第一横向和第二横向,第一横向与第二横向相垂直。
107.在这种方案中,当第一啮合部和第二啮合部26a均为齿条时,与第一横向相对应的齿条沿第二横向延伸,与第二横向相对应的齿条沿第一横向延伸。
108.参考图5,示出了本发明移动机构第三实施例的俯视图。其中,为了便于图示,图5仅示意出了固定平台、位移模块和可移动平台。
109.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:多个位移模块60中的横向驱动电极(图未示)与横向可动电极(图未示)的相对方向相互垂直。
110.本实施例中,移动机构包括多个相隔离的位移模块60,多个位移模块60在固定平台64上呈阵列式排布。其中,部分位移模块60用于驱动可移动平台63沿第一横向(如图中x方向所示)发生位移,剩余的位移模块60用于驱动可移动平台63沿第二横向(如图中y方向所示)发生位移,所述第一横向与第二横向相垂直,相应的,部分的位移模块60中的横向驱动电极与横向可动电极的相对方向与第一横向相同,剩余位移模块60中的横向驱动电极与横向可动电极的相对方向与第二横向相同。
111.通过上述位移模块60的排布方式,从而使移动机构中的可移动平台63既可以沿着第一横向移动,又可以沿着第二横向移动,且通过控制可移动平台63沿第一横向的移动次数,以及沿第二横向的移动次数,从而使可移动平台实现二维平面内的位移。
112.例如,位移模块60包括第一位移模块61和第二位移模块62,在第一位移模块61中,
横向驱动电极与横向可动电极的相对方向为第一横向,在第二位移模块62中,横向驱动电极与横向可动电极的相对方向为第二横向。
113.需要说明的是,当第一接合部包括第一啮合部,第一啮合部包括凸起或凹陷,所述第二接合部包括能够与第一啮合部相啮合的第二啮合部,所述第二啮合部包括凸起或凹陷,且第一啮合部和第二啮合部均为齿条时,第一位移模块61对应的移动区域中,齿条沿第二横向延伸,第二位移模块62对应的移动区域中,齿条沿第一横向延伸,从而使可移动平台63实现二维平面内的位移。
114.对本实施例所述移动机构的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
115.参考图6,示出了本发明移动机构第四实施例的剖视图。
116.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:所述移动机构还包括:啮合延伸板32,位于所述第二接合部31的顶面,所述啮合延伸板32沿向可动电极(未标示)和横向驱动电极(未标示)的排布方向向所述横向可动电极的两侧悬空延伸至固定平台35的部分区域上。
117.所述第一接合部37与第二接合部31能够分离或接合。
118.具体地,第二接合部31通过啮合延伸板32实现与第一接合部37的分离或接合,也就是说,啮合延伸板32能够实现与第一接合部37的分离或接合。
119.其中,与第二接合部31相比,啮合延伸板32与第一接合部37的接合区域更多,啮合延伸板32与第一接合部37的接合能力更强,这相应提高了第二接合部31与可移动平台36的接合能力。
120.本实施例中,啮合延伸板32的材料可以包括为介质材料、金属材料或掺杂有离子的半导体材料。作为一种示例,所述第一接合部37包括第一啮合部37a,第一啮合部37a包括凸起或凹陷,所述啮合延伸板32的顶面具有能够与所述第一啮合部37a相啮合的第二啮合部33,所述第二啮合部33包括凸起或凹陷。
121.对本实施例所述移动机构的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
122.参考图7,示出了本发明移动机构第五实施例的剖视图。
123.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:所述移动机构还包括:第二纵向驱动电极44,位于支撑柱46的顶面,第二纵向驱动电极44与横向驱动电极(未标示)相隔离,所述第二纵向驱动电极44和所述第二接合部41能够静电吸合。
124.其中,第二纵向电极44与横向驱动电极相隔离,从而能够分别对第二纵向电极44与横向驱动电极加载驱动信号。
125.所述横向可动电极带动可移动平台45横向移动第一预设间距后,固定所述可移动平台45,并使所述第一纵向驱动电极43和纵向可动电极42静电吸合,第一纵向驱动电极43下拉纵向可动电极42和横向可动电极,使得所述第二接合部41与第一接合部47分离。同理,所述横向可动电极带动可移动平台45横向移动第一预设间距后,使所述第二纵向驱动电极44和第二接合部41静电吸合,从而使所述第二接合部41与第一接合部47分离。因此,通过在支撑柱46的顶面设置第二纵向驱动电极44,以提高对第一接合部47的下拉能力和效率,从
而能够更快地使所述第二接合部41与第一接合部47分离。
126.本实施例中,第二纵向驱动电极44的材料为导电材料,例如为金属材料或掺杂有离子的半导体材料。对第二纵向驱动电极44的材料的描述,可参考前述实施例中对横向驱动电极的相应描述,在此不再赘述。
127.需要说明的是,本实施例中,第二绝缘层(图未示)还位于及第二纵向电极44的顶部。
128.对本实施例所述移动机构的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
129.参考图8,示出了本发明移动机构第六实施例的剖视图。
130.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:所述移动机构还包括:啮合延伸板52,位于所述第二接合部51的顶面,所述啮合延伸板52沿所述横向可动电极(未标示)和横向驱动电极(未标示)的排布方向向所述横向可动电极的两侧悬空延伸至所述固定平台(未标示)的部分区域上;第二纵向驱动电极54,位于支撑柱55的顶面,第二纵向驱动电极54与横向驱动电极相隔离,所述第二纵向驱动电极54和所述第二接合部51能够静电吸合。
131.与第二接合部51相比,啮合延伸板52与第一接合部(未标示)的接合面积更大,因此,啮合延伸板52与第一接合部的接合能力更强,这相应提高了第二接合部51与可移动平台56的锁位能力。
132.作为一种示例,所述第一接合部包括第一啮合部57,所述第一啮合部57包括凸起或凹陷,所述啮合延伸板52的顶面具有能够与所述第一啮合部57相啮合的第二啮合部53,所述第二啮合部53包括凸起或凹陷。
133.通过在支撑柱55的顶面设置第二纵向驱动电极54,以提高对第二接合部51的下拉能力和效率,从而能够更快地使第一接合部与第二接合部51分离。
134.综上,通过啮合延伸板52和第二纵向驱动电极54,有利于进一步提高所述移动机构的性能。
135.对本实施例所述移动机构的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
136.参考图9,示出了本发明移动机构第七实施例的剖视图。
137.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:所述可移动平台60上方设有第三纵向驱动电极64,所述第三纵向驱动电极64朝向所述可移动平台60;所述可移动平台60包括可动极板62以及位于所述可动极板62上的可动上电极61,所述可动上电极61与所述第三纵向驱动电极64能够分离和吸合。
138.横向可动电极(未标示)带动可移动平台60横向移动第一预设间距(未标示)后,通过使所述可动上电极61与第三纵向驱动电极64吸合,从而通过第三纵向驱动电极64固定可移动平台60,在这种情况下,同步下拉横向可动电极和纵向可动电极(未标示),从而使所有第一接合部与第二接合部分离,使得所有横向可动电极和纵向可动电极回弹至初始位置,进而提高消除锁位以及重新锁位的效率。
139.具体地,在移动机构工作时,当可动上电极61和第三纵向驱动电极64之间具有电位差时,可动上电极61和第三纵向驱动电极64能够静电吸合。
140.本实施例中,所述第三纵向驱动电极64位于所述顶部限位结构65朝向所述可移动平台60的面上。
141.可动上电极61的材料为导电材料。本实施例中,可动上电极61的材料为金属材料,金属材料包括铝、铜或钨。在其他实施例中,可动上电极的材料还可以为掺杂有离子的半导体材料。
142.本实施例中,第三纵向驱动电极64也为导电材料。具体地,第三纵向驱动电极64的材料为金属材料或掺杂有离子的半导体材料。
143.需要说明的是,所述移动机构还包括:第四绝缘层(图未示),位于可动上电极61的顶面;或者,第五绝缘层,位于第三纵向驱动电极64朝向可动上电极61的表面。
144.以第四绝缘层为例,第四绝缘层用于实现可动上电极61和第三纵向驱动电极64之间的绝缘,从而在移动机构工作时,当可动上电极61和第三纵向驱动电极64之间具有电位差时,可动上电极61和第三纵向驱动电极64之间产生静电吸引力,且可动上电极61和第三纵向驱动电极64之间不会短路。同理,第五绝缘层也用于实现可动上电极61和第三纵向驱动电极64之间的绝缘。
145.所述第四绝缘层和第五绝缘层的材料为介质材料。本实施例中,所述第四绝缘层和第五绝缘层的材料可以为氮化硅。在其他实施例中,所述第四绝缘层和第五绝缘层的材料还可以为氧化硅、氮氧化硅等其他合适的介质材料。
146.对本实施例所述移动机构的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
147.参考图10,示出了本发明移动机构第八实施例的剖视图。
148.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:所述第一接合部73包括第一吸合电极73a,所述可移动平台72还包括位于所述第一接合部73上的可动极板74;所述第二接合部71包括第二吸合电极71a。
149.第一吸合电极73a和第二吸合电极71a能够静电吸合,从而使得第一接合部73和第二接合部71之间能够通过静电吸合的方式实现接合。
150.第一吸合电极73a的材料为导电材料。本实施例中,第一吸合电极73a的材料为金属材料,所述金属材料材料包括铝、铜或钨。在其他实施例中,第一吸合电极的材料还可以为掺杂有离子的半导体材料。
151.第二吸合电极71a的材料为导电材料。本实施例中,第二吸合电极71a的材料为金属材料,所述金属材料材料包括铝、铜或钨。在其他实施例中,第二吸合电极的材料还可以为掺杂有离子的半导体材料。
152.还需要说明的是,所述移动机构还包括:第六绝缘层(图未示),位于第二吸合电极71a的表面;或者,第七绝缘层(图未示),位于第一吸合电极73a朝向第二吸合电极71a的表面。
153.以第六绝缘层为例,第六绝缘层用于实现第二吸合电极71a和第一吸合电极73a之间的绝缘,从而在移动机构工作时,当第二吸合电极71a和第一吸合电极73a之间具有电位差时,第二吸合电极71a和第一吸合电极73a之间产生静电吸引力,且第二吸合电极71a和第一吸合电极73a之间不会短路。同理,第七绝缘层也用于实现第二吸合电极71a和第一吸合电极73a之间的绝缘。
154.所述第六绝缘层和第七绝缘层的材料为介质材料。本实施例中,所述第六绝缘层和第七绝缘层的材料可以为氮化硅。在其他实施例中,所述第六绝缘层和第七绝缘层的材料还可以为氧化硅、氮氧化硅等其他合适的介质材料。
155.在另一些实施例中,第一接合部还包括位于第一吸合电极表面的第一啮合部,所述第一啮合部包括凸起或凹陷,第二接合部还包括位于第二吸合电极表面的第二啮合部,所述第二啮合部能够与所述第一啮合部相啮合,所述第二啮合部包括凸起或凹陷,从而使得第一接合部与第二接合部之间能够同时实现物理锁位以及静电锁位。
156.在其他实施例中,所述移动机构还包括:锁位延伸板,啮合延伸板,位于所述第二接合部的顶面,所述啮合延伸板沿所述横向可动电极和横向驱动电极的排布方向向所述横向可动电极的两侧悬空延伸至所述固定平台的部分区域上。
157.对本实施例所述移动机构的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
158.相应的,本发明实施例还提供一种移动机构的形成方法。其中,所述移动机构具有预设移动步长。
159.图11至图25是本发明移动机构的形成方法第一实施例的结构示意图。
160.参考图11,提供固定平台100,包括工作区100a。
161.所述形成方法用于形成移动机构,工作区100a为移动机构的可移动区域。
162.固定平台100用于为移动机构的形成提供工艺平台。
163.本实施例中,所述固定平台100为衬底。在其他实施例中,所述固定平台还可以为其他功能结构。具体地,衬底可以为半导体衬底,衬底可以通过半导体制造工艺形成。作为一种示例,衬底为硅衬底。在其他实施例中,衬底的材料还可以为锗、锗化硅、碳化硅、砷化镓或镓化铟等其他材料。
164.本实施例中,固定平台100还包括环绕工作区100a的限位区100b。
165.后续在固定平台100的限位区100b中形成围壁结构,在移动机构的工作过程中,围壁结构用于限定可移动平台在沿平行于固定平台100表面方向上的可移动范围。
166.需要说明的是,为了便于图示,本实施例仅示出了部分的位移模块区100c和部分的限位区100b。
167.结合参考图11和图12,在工作区100a的固定平台100上形成第一纵向驱动电极111、以及覆盖第一纵向驱动电极111的绝缘层120(如图12所示)。
168.后续还会在所述第一纵向驱动电极111上方形成纵向可动电极,所述第一纵向驱动电极和所述纵向可动电极能够静电吸合,从而下拉纵向可动电极。
169.在移动机构的工作过程中,绝缘层120能够对第一纵向驱动电极111和纵向可动电极之间起到绝缘的作用,从而在移动机构工作时,当第一纵向驱动电极111和纵向可动电极之间具有电位差时,第一纵向驱动电极111和纵向可动电极之间产生静电吸引力,且第一纵向驱动电极111和纵向可动电极之间不会短路。而且,在后续的刻蚀工艺过程中,绝缘层120能够对第一纵向驱动电极111起到保护作用。
170.本实施例中,绝缘层120的材料为氮化硅。在其他实施例中,绝缘层的材料还可以为氧化硅或氮氧化硅等合适的绝缘材料。
171.本实施例中,在固定平台100上形成第一纵向驱动电极111、以及覆盖第一纵向驱
动电极111的绝缘层120的步骤包括:如图11所示,在固定平台100上形成第一子绝缘层121;在第一子绝缘层121中形成露出固定平台100的第二开口124;如图12所示,在第二开口124中形成第一纵向驱动电极111;形成覆盖第一子绝缘层121和第一纵向驱动电极111的第二子绝缘层122,第二子绝缘层122和第一子绝缘层121用于构成绝缘层120。
172.具体地,利用依次进行的沉积工艺和平坦化工艺(例如,化学机械研磨工艺),在第二开口124中形成第一纵向驱动电极111。
173.在其他实施例中,也可以在固定平台上形成第一纵向驱动电极之后,形成覆盖第一纵向驱动电极的绝缘层。相应的,形成第一纵向驱动电极的步骤包括:形成覆盖固定平台的纵向电极材料层;对纵向电极材料层进行图形化处理(例如,刻蚀处理),形成第一纵向驱动电极。
174.本实施例中,第一纵向驱动电极111的材料为导电材料。具体地,第一纵向驱动电极111的材料为金属材料,包括铝、铜或钨。在其他实施例中,第一纵向驱动电极的材料还可以为掺杂有离子的半导体材料。
175.本实施例中,在形成第一纵向驱动电极111的步骤中,还在工作区100a的固定平台100上形成第一电极引脚113和第二电极引脚112。具体地,第一电极引脚113和第二电极引脚112形成于第二开口124中。
176.第一电极引脚113用于与后续形成的固定电极一一对应并相连。固定电极与第一电极引脚113实现电连接,从而通过第一电极引脚113对固定电极加载驱动信号。
177.第二电极引脚112用于与后续形成的横向驱动电极一一对应并相连。横向驱动电极与第二电极引脚112实现电连接,从而通过第二电极引脚112对相对应的横向驱动电极加载驱动信号。
178.需要说明的是,第一纵向驱动电极111、第一电极引脚113和第二电极引脚112之间相互隔离,从而避免第一纵向驱动电极111、第一电极引脚113和第二电极引脚112之间互相短路,进而保证位移模块能够正常工作。
179.继续参考图12,还需要说明的是,形成绝缘层120后,所述形成方法还包括:在绝缘层120中形成第三开口123,第三开口123底部露出第二电极引脚112。
180.后续会在工作区100a的固定平台100上形成与第一纵向驱动电极111相隔离的支撑柱,还会在支撑柱的侧面形成横向驱动电极,通过先形成第三开口123,以便于后续形成横向驱动电极时,横向驱动电极能够形成于第三开口123中并与第二电极引脚112相连。而且,通过在形成支撑柱之前形成第三开口123,有利于降低形成第三开口123时的光刻工艺的工艺难度。
181.本实施例中,利用干法刻蚀工艺(例如,各向异性的干法刻蚀工艺),刻蚀所述绝缘层120。干法刻蚀工艺具有各向异性刻蚀的特性,有利于提高第三开口123的侧壁形貌质量以及平行于固定平台100表面方向的尺寸精度。
182.参考图13,在所述工作区100a的固定平台100上形成与所述第一纵向驱动电极111相隔离的支撑柱130。
183.后续在所述支撑柱130的侧面形成横向驱动电极,所述支撑柱130用于为横向驱动电极起到支撑作用,从而提高横向驱动电极的机械强度和稳定性。
184.作为一种示例,所述支撑柱130为条型结构,支撑柱130具有延伸方向,且与支撑柱
130的延伸方向相垂直的方向上,支撑柱130具有相对的两个侧面。
185.相应的,所述支撑柱130还用于为位于其侧面的横向驱动电极起到电隔离的作用,便于分别对位于其侧面的横向驱动电极施加驱动信号。
186.本实施例中,支撑柱130的材料为介质材料。作为一种示例,支撑柱130的材料为氮化硅。在另一些实施例中,支撑柱的材料还可以为氧化硅或氮氧化硅等其他合适的介质材料。具体地,利用依次进行的沉积工艺和刻蚀工艺,形成支撑柱130。
187.在其他实施例中,形成支撑柱的步骤包括:利用依次进行的沉积工艺和刻蚀工艺,在第一纵向驱动电极侧部的绝缘层上形成导电柱;形成保形覆盖导电柱和绝缘层120的介质膜;采用各向异性的刻蚀工艺刻蚀介质膜,保留导电柱侧面的剩余介质膜作为介质层。相应的,导电柱和横向驱动电极之间通过介质层实现电隔离,也能使支撑柱用于对横向驱动电极起到电隔离的作用。
188.需要说明的是,支撑柱130还形成于限位区100b的绝缘层120上。限位区100b中的支撑柱130用于作为围壁结构的一部分。
189.还需要说明的是,在其他实施例中,也可以在形成支撑柱之后,形成第三开口。
190.参考图14,在支撑柱130的侧面形成横向驱动电极140。
191.横向驱动电极140与后续形成的横向可动电极相对设置,在移动机构的工作过程中,横向驱动电极140用于驱动横向可动电极沿平行于固定平台100表面的方向发生位移。
192.本实施例中,位于支撑柱130一侧的横向驱动电极140作为第一横向驱动电极140a,位于支撑柱130另一侧的横向驱动电极140作为第二横向驱动电极140b,第一横向驱动电极140a用于驱动横向可动电极沿第一平移方向发生位移,第二横向驱动电极140b用于驱动横向可动电极沿第二平移方向发生位移。其中,第一平移方向和第二平移方向相反,从而带动可移动平台左右移动。
193.具体地,形成横向驱动电极140的步骤包括:形成驱动电极材料层(图未示),驱动电极材料层保形覆盖支撑柱130、绝缘层120和第二电极引脚112;对驱动电极材料层进行刻蚀处理,保留位于支撑柱130的侧面以及第三开口123中驱动电极材料层作为横向驱动电极140。
194.其中,在刻蚀处理的过程中,可以利用光罩定义驱动电极材料层中需要被刻蚀的区域,从而使得位于支撑柱130的侧面以及第三开口123中驱动电极材料层被保留。
195.横向驱动电极140还形成在第三开口123中并与第二电极引脚112相连,从而使横向驱动电极140与第二电极引脚112实现电连接。
196.本实施例中,横向驱动电极140的材料为导电材料。具体地,横向驱动电极140的材料为掺杂有离子的半导体材料,从而能够与半导体制造工艺相兼容。在其他实施例中,所述横向驱动电极的材料还可以为金属材料,所述金属材料包括铝、铜或钨。
197.参考图15,形成保形覆盖支撑柱130、横向驱动电极140和第一纵向驱动电极111的第一牺牲层150,位于横向驱动电极140侧面的第一牺牲层150的厚度t为第一预设间距。
198.后续在第一牺牲层150上形成一端固定的导线、与所述第一纵向驱动电极111相对且连接导线的纵向可动电极、与所述横向驱动电极140相对且连接所述纵向可动电极的横向可动电极、以及位于所述支撑柱130上方且连接所述横向可动电极的第二接合部,因此,后续通过去除第一牺牲层150的方式,即可使导线、纵向可动电极、横向可动电极以及第二
接合部悬空设置于支撑柱130、横向驱动电极140和固定平台100上方。
199.因此,第一牺牲层150的材料为易于被去除的材料,且第一牺牲层150和绝缘层120之间具有较高的刻蚀选择比,从而降低去除第一牺牲层150的工艺难度,并减小去除第一牺牲层150的工艺对绝缘层120的损伤。本实施例中,第一牺牲层150和绝缘层120的刻蚀选择比大于3:1。
200.本实施例中,第一牺牲层150的材料为氧化硅。在其他实施例中,所述第一牺牲层的材料还可以为非晶碳或锗。
201.本实施例中,位于横向驱动电极140侧面的第一牺牲层150的厚度为第一预设间距。第一预设间距用于决定后续横向可动电极与相对应的横向驱动电极的间距,从而决定移动机构单次移动的步长。因此,根据移动机构的移动行程和移动精度的需求,合理设定第一牺牲层150的厚度t。第一牺牲层150的厚度t越小,移动精度越高。
202.还需要说明的是,第一牺牲层150还保形覆盖限位区100b的支撑柱130和横向驱动电极140,从而能够在同一制程中形成围壁结构,提高了工艺兼容性,降低了形成移动机构的工艺复杂度。
203.此外,以前述形成的绝缘层120作为第一绝缘层,在形成第一牺牲层150之前,所述形成方法还包括:在横向驱动电极140的侧壁形成第二绝缘层(图未示);或者,在形成第一牺牲层150后,形成保形覆盖第一牺牲层150的第三绝缘层(图未示)。
204.以第二绝缘层为例,第二绝缘层用于实现横向可动电极和横向驱动电极140之间的绝缘,从而在移动机构工作时,当横向可动电极和横向驱动电极140之间具有电位差时,横向可动电极和横向驱动电极140之间产生静电吸引力,且横向可动电极和横向驱动电极140之间不会短路。同理,第三绝缘层也用于实现横向可动电极和横向驱动电极140之间的绝缘。
205.第二绝缘层和第三绝缘层的材料为介质材料。本实施例中,第二绝缘层和第三绝缘层的材料为氮化硅。在其他实施例中,第二绝缘层和第三绝缘层的材料还可以为氧化硅、氮氧化硅等其他合适的介质材料。
206.结合参考图16和图17,刻蚀支撑柱130露出的第一牺牲层150和绝缘层200,在第一牺牲层150和绝缘层120中形成第一开口124(如图17所示)。
207.第一开口124用于为后续形成固定电极提供空间位置,从而使得固定电极固定于固定平台100上。具体地,第一开口124底部露出第一电极引脚113,从而使固定电极能够与第一电极引脚113实现电连接。
208.本实施例中,刻蚀支撑柱130露出的第一牺牲层150和绝缘层200的步骤包括:如图16所示,对第一牺牲层150进行第一刻蚀处理;如图17所示,在第一刻蚀处理后,对绝缘层120进行第二刻蚀处理。
209.在第一刻蚀处理后,剩余的第一牺牲层150露出第一电极引脚113上方的绝缘层120,从而为后续进行第二刻蚀做准备。其中,在第一刻蚀处理的过程中,还刻蚀去除限位区100b中位于绝缘层120顶部的第一牺牲层150,以露出限位区100b的绝缘层120。
210.在后续制程中,形成位于第一牺牲层150上并填充于第一开口124中的第一导电层,第一导电层还会形成在限位区100b中,通过露出限位区100b的绝缘层120,使得形成于限位区100b中的第一导电层与绝缘层120相接触,从而使得限位区100b中的第一导电层通
过绝缘层120固定于固定平台100上。
211.具体地,利用光罩(mask)对第一牺牲层150进行第一刻蚀处理,从而仅去除绝缘层120上部分位置处的第一牺牲层150。
212.本实施例中,在第一刻蚀处理后,利用另一张光罩对绝缘层200进行第二刻蚀处理,刻蚀去除第一电极引脚113顶部的绝缘层120,从而在第一牺牲层150和绝缘层200中形成第一开口124。
213.本实施例中,第一刻蚀处理和第二刻蚀处理的工艺均为干法刻蚀工艺(例如,各向异性的干法刻蚀工艺),从而使得刻蚀后图形轮廓的质量较佳。
214.结合参考图18至图21,形成位于第一牺牲层150上并填充于第一开口124(如图17所示)中的第一导电层160,所述第一导电层160包括一端固定的导线164、与第一纵向驱动电极111相对且连接导线164的纵向可动电极163、与所述横向驱动电极140相对且连接所述纵向可动电极163的横向可动电极162、以及位于所述支撑柱130上方且连接横向可动电极162的第二接合部161;形成覆盖所述第一导电层160和第一牺牲层150的第二牺牲层170(如图21所示)。
215.后续在第二接合部161的上方形成可移动平台,所述可移动平台具有第一接合部,第二接合部161用于实现与第一接合部的分离或接合,并驱动可移动平台发生平移,从而使可移动平台带动被移动部件发生移动。
216.而且,当移动机构未进行移动被移动部件的操作时,通过使第二接合部161和第一接合部接合,还能够改善或避免在非工作状态下,可移动平台发生无定态游荡的问题,从而进一步精确控制被移动部件的位移。
217.具体地,在第二接合部161和第一接合部接合的情况下,当横向可动电极162和相对应的横向驱动电极140之间静电吸合时,在横向驱动电极140的驱动下,使横向可动电极162沿横向移动第一预设间距,从而使可移动平台发生微小的位移。
218.可移动平台沿横向移动第一预设间距后,固定可移动平台,并使第一纵向驱动电极111和纵向可动电极163静电吸合,第一纵向驱动电极111下拉所述纵向可动电极163和横向可动电极162,使得所述第一接合部与第二接合部161分离,因此,当第一纵向驱动电极111呈浮接状态时,横向可动电极162和纵向可动电极163在导线164的作用下回弹至初始位置,并重新使所述第一接合部与第二接合部161接合。
219.综上,单次移动的操作使可移动平台移动第一预设间距,从而提高了所述移动机构的移动精度,而且,通过往复进行移动、下拉和归位的动作,使可移动平台发生周期性的小步长移动累积以实现较大的位移,因此,还使得本发明提供的移动机构具有行程大的优点。
220.所述导线164具有一定的宽度,从而使导线164具有一定的机械强度,从而能够支撑横向可动电极162和纵向可动电极163。
221.本实施例中,所述导线164为弹簧导线,从而具备可伸缩性能。具体地,所述导线164为z字型弹簧导线。在其他实施例中,导线也可以为m型弹簧导线或u型弹簧导线。
222.本实施例中,形成位于第一牺牲层150上的第一导电层160的步骤中,所述第一导电层160还包括位于固定平台100上的固定电极165。
223.具体地,所述固定电极165形成于第一开口124(如图17所示)中,所述导线164与所
述固定电极165相连。
224.固定电极165用于使导线164的一端固定,还用于与横向可动电极162和纵向可动电极163实现电连接,从而通过固定电极165对横向可动电极162和纵向可动电极163加载驱动信号。本实施例中,固定电极165与导线164一一对应。
225.本实施例中,在同一步骤中形成固定电极165、横向可动电极162、纵向可动电极163、第二接合部161和导线164,降低了形成移动机构的工艺复杂度。而且,固定电极165、横向可动电极162、纵向可动电极163、第二接合部161和导线164为一体型结构,从而提高连接强度和机械强度。
226.本实施例中,形成第一导电层160的步骤中,第一导电层160还形成在限位区100b的第一牺牲层150上。具体地,在限位区100b中,第一导电层160保形覆盖第一牺牲层150以及第一牺牲层150露出的绝缘层120。
227.其中,工作区100a和限位区100b的第一导电层160相隔离,从而避免工作区100a和限位区100b的第一导电层160之间互相短路,进而保证位移模块能够正常工作。
228.本实施例中,第一导电层160的材料为导电材料,例如为金属材料或掺杂有离子的半导体材料。
229.需要说明的是,本实施例中,后续保留所述支撑柱130。在其他实施例中,后续还会去除位移模块区中的支撑柱。
230.第二牺牲层170用于为后续可移动平台的形成提供工艺平台。
231.后续还需去除第二牺牲层170,因此,第二牺牲层170的材料为易于被去除的材料,且第二牺牲层170和绝缘层120之间具有较高的刻蚀选择比,从而降低去除第二牺牲层170的工艺难度,并减小去除第二牺牲层170的工艺对绝缘层120的损伤。本实施例中,第二牺牲层170和绝缘层120的刻蚀选择比大于3:1。
232.本实施例中,第二牺牲层170和第一牺牲层150的材料相同,以便于后续同时去除第二牺牲层170和第一牺牲层150。具体地,第二牺牲层170的材料为氧化硅。在其他实施例中,第二牺牲层的材料还可以为非晶碳或锗。
233.参考图19,形成所述第一导电层160后,所述形成方法还包括:形成覆盖所述第一导电层160和第一牺牲层160的第一子牺牲层171,所述第一子牺牲层171与所述第二接合部161的顶面相齐平。
234.所述第一子牺牲层171作为后续所形成的第二牺牲层的一部分。
235.第一子牺牲层171露出第二接合部161的顶面,从而为后续在第二接合部161的顶面形成啮合材料层做准备。
236.而且,第一子牺牲层171通过依次进行的沉积工艺和平坦化工艺形成,通过使第一子牺牲层171露出第二接合部161的顶面相齐平,从而在平坦化工艺的过程中,以第二接合部161的顶面作为平坦化工艺的停止位置,有利于提高第一子牺牲层171的顶面平坦度。
237.继续参考图19,形成所述第一子牺牲层171后,所述形成方法还包括:在所述第二接合部161的顶面形成啮合材料层180。
238.本实施例中,工作区100a中的啮合材料层180用于为后续形成第二啮合部做准备。
239.本实施例中,啮合材料层180的材料为介质材料,例如为氮化硅、氧化硅或氮氧化硅等合适的介质材料。在其他实施例中,啮合材料层的材料也可以为导电材料,例如为金属
材料或掺杂有离子的半导体材料。
240.本实施例中,啮合材料层180通过依次进行的沉积工艺和刻蚀工艺形成。
241.本实施例中,先形成覆盖第一导电层160的啮合材料层180,因此,在形成啮合材料层180的刻蚀工艺过程中,对第一子牺牲层171所对应的区域进行刻蚀,从而避免第一导电层160受到刻蚀损伤。
242.本实施例中,形成第一子牺牲层171后,所述形成方法还包括:在限位区100b的第一导电层160顶部形成第二限位层182。
243.第二限位层182用于作为围壁结构的一部分。
244.本实施例中,为了简化工艺步骤,啮合材料层180和第二限位层182在同一工艺步骤中形成。
245.继续参考图19,在所述啮合材料层180露出的第一子牺牲层171上形成第二子牺牲层172,所述第二子牺牲层172与啮合材料层180的顶面相齐平。
246.第二子牺牲层172露出啮合材料层180的顶面,从而为后续刻蚀啮合材料层180做准备。
247.本实施例中,第二子牺牲层172通过依次进行的沉积工艺和平坦化工艺形成。其中,在平坦化工艺的过程中,以啮合材料层180的顶面作为平坦化工艺的停止位置,有利于提高第二子牺牲层172的顶面平坦度。
248.需要说明的是,在其他实施例中,也可以在形成第二子牺牲层之后,形成锁位材料层。具体地,形成第二子牺牲层后,刻蚀第二子牺牲层,在第二子牺牲层中形成露出第一导电层顶部的沟槽;填充沟槽,形成位于沟槽中的啮合材料层层。
249.在这种情况下,第一子牺牲层和第二子牺牲层在同一步骤中形成,高于所述第一导电层顶面的部分作为第二子牺牲层,剩余的部分作为第一子牺牲层。
250.本实施例中,所述第二子牺牲层172还形成在第二限位层182露出的第一子牺牲层171上,所述第二子牺牲层172与第二限位层182的顶面相齐平。
251.参考图20,形成第二子牺牲层172后,刻蚀工作区100a的第二子牺牲层172和啮合材料层180,将啮合材料层180和第二子牺牲层172图形化为第二啮合部181,所述第二啮合部181包括凸起或凹陷。
252.通过第二啮合部181,能够使第二接合部161和后续形成的可移动平台通过相啮合的方式实现物理锁位。
253.本实施例中,采用干法刻蚀工艺(例如,各向异性的干法刻蚀工艺)刻蚀第二子牺牲层172和啮合材料层180,从而提高第二啮合部181的侧壁光滑度和尺寸精度。
254.本实施例中,第二啮合部181呈阵列式排布。
255.后续形成可移动平台后,所述可移动平台具有第一接合部,所述可移动平台相应具有与所述第二啮合部181相啮合的第一啮合部,通过使第二啮合部181呈阵列式排布,相应使得第一啮合部呈阵列式排布,从而便于使第二接合部161能够在多个横向上实现移动,进而使可移动平台在多个横向上均可发生位移。在另一些实施例中,第二啮合部也可以为齿条。
256.本实施例中,即使第二啮合部181的材料为介质材料,也能够实现第二接合部161与第一接合部的啮合。在其他实施例中,第二啮合部的材料也可以为导电材料,从而使第二
接合部与第一接合部还能够通过静电吸合的方式实现静电锁位。
257.参考图21,形成第二牺牲层170的步骤还包括:在工作区100a中,形成覆盖啮合材料层180和第二子牺牲层172的第三子牺牲层190,第三子牺牲层190、第二子牺牲层172和第一子牺牲层171用于构成第二牺牲层170。
258.本实施例中,在形成第三子牺牲层190之前,刻蚀工作区100a的第二子牺牲层172和啮合材料层180,将啮合材料层180和第二子牺牲层172图形化为第二啮合部181,因此,形成覆盖啮合材料层180和第二子牺牲层172的第三子牺牲层190指的是:第三子牺牲层190覆盖图形化后的啮合材料层180和第二子牺牲层172。
259.具体地,第三子牺牲层190保形覆盖第二啮合部181和第一子牺牲层171。
260.后续在第三子牺牲层190上形成可移动平台,且可移动平台相应具有位于相邻第二啮合部181之间的第一啮合部,通过形成第三子牺牲层173,以隔离第二啮合部181和第一啮合部,从而避免第二啮合部181和第一啮合部相连接。
261.本实施例中,利用依次进行的沉积工艺和刻蚀工艺,形成第三子牺牲层190。其中,第三子牺牲层190露出第二限位层182,从而为围壁结构的形成做准备。
262.参考图22,在第二牺牲层170上形成可移动平台200,所述可移动平台200具有第一接合部210,所述第一接合部210与第二接合部161能够分离或接合。
263.可移动平台200用于支撑被移动部件,从而在可移动平台200发生移动时,能够带动被移动部件移动,使被移动部件发生位移。
264.本实施例中,采用依次进行的沉积工艺和刻蚀工艺,形成可移动平台200。
265.其中,在第二啮合部181的作用下,在沉积工艺的过程中,用于形成可移动平台200的材料还会填充至相邻第二啮合部181之间的区域中,因此,形成可移动平台200后,可移动平台200具有与所述第二啮合部181相啮合的第一啮合部210a,所述第一啮合部210a包括凸起或凹陷。
266.相应的,第一接合部210与第二接合部161通过第二啮合部181和第一啮合部210a实现物理锁位。
267.本实施例中,第二啮合部181呈阵列式排布,相应的,第一啮合部210a呈阵列式排布。在另一些实施例中,当第二啮合部为齿条时,第一啮合部相应也为齿条,且第二啮合部和相对应的第一啮合部的齿条的延伸方向相同。
268.本实施例中,第一啮合部210a的材料为介质材料。即使第一啮合部210a的材料为介质材料,也能够实现第一接合部210与第二接合部161的接合。具体地,第一啮合部210a的材料可以为氮化硅、氧化硅或氮氧化硅等合适的介质材料。
269.在另一些实施例中,第一啮合部的材料也可以为导电材料。通过使第一啮合部的材料为导电材料,便于使第一接合部与第二接合部还能够通过静电吸合的方式实现静电锁位。导电材料可以为金属材料或掺杂有离子的半导体材料。
270.本实施例中,在形成可移动平台200的步骤中,还在限位区100b的第一导电层160顶部形成第一限位层220,所述第一限位层220与可移动平台200相隔离,所述第一限位层220与限位区100b的第一导电层160相连接,所述限位区100b的第一限位层220、第一导电层160、第一牺牲层150、横向驱动电极140和支撑柱130用于构成围壁结构250。
271.围壁结构250用于限定可移动平台200在沿平行于固定平台100方向上的可移动范
围。
272.本实施例中,限位区100b的第一导电层160顶部形成有第二限位层182,相应的,第一限位层220形成在第二限位层182上,限位区100b的第一限位层220、第二限位层182、第一导电层160、第一牺牲层150、横向驱动电极140和支撑柱130用于构成围壁结构250。
273.需要说明的是,为了增大围壁结构250和可移动平台200沿平行于固定平台100表面的方向的距离,第一限位层220覆盖部分的第二限位层182。相应的,形成第二限位层182后,还包括:去除第一限位层220露出的第二限位层182。
274.结合参考图23,形成第一限位层220后,形成方法还包括:在可移动平台200和第一限位层220露出的第二牺牲层120上形成第三牺牲层230,第三牺牲层230覆盖可移动平台200并露出第一限位层220的顶面
275.后续制程还包括在第一限位层220的顶面形成顶部限位结构,且顶部限位结构还延伸至可移动平台200的部分区域上,第三牺牲层230用于隔离顶部限位结构和可移动平台200,从而避免顶部限位结构和可移动平台200相连接。
276.第三牺牲层230的材料可以为氧化硅、非晶碳或锗。本实施例中,第三牺牲层230和第一牺牲层150的材料相同,以便于后续同时去除第三牺牲层230、第三子牺牲层190、第二牺牲层170和第一牺牲层150。具体地,第三牺牲层230的材料为氧化硅。对第三牺牲层230的具体描述,可参考前述对第一牺牲层150的相关描述,在此不再赘述。
277.具体地,通过依次进行的沉积工艺和刻蚀工艺,形成所述第三牺牲层230。
278.参考图24,在第一限位层220的顶面形成顶部限位结构260,顶部限位结构260还延伸至可移动平台200的部分区域上。
279.顶部限位结构260用于限定可移动平台200在沿固定平台100表面的法线方向的可移动范围。
280.本实施例中,顶部限位结构260的材料为介质材料,且第一牺牲层150、第二牺牲层170、第三子牺牲层230以及第三牺牲层230均与顶部限位结构260有较高的刻蚀选择比,例如,刻蚀选择比大于3:1。
281.具体地,第一牺牲层150、第二牺牲层170、第三子牺牲层230以及第三牺牲层230的材料均为氧化硅,顶部限位结构260的材料相应为氮化硅。在另一些实施例中,顶部限位结构的材料也可以包括导电材料。
282.在其他实施例中,在第二牺牲层上形成可移动平台的步骤包括:在第二牺牲层上形成可动极板、以及位于可动极板上的可动上电极,可动极板和可动上电极用于构成可移动平台。
283.相应的,在所述第一限位层的顶面形成顶部限位结构之前,所述形成方法还包括:在所述第一限位层的顶面形成第三纵向驱动电极;所述顶部限位结构形成于所述第三纵向驱动电极上。
284.横向可动电极带动可移动平台横向移动第一预设间距后,通过使所述可动上电极与第三纵向驱动电极静电吸合,从而通过第三纵向驱动电极固定可移动平台,在这种情况下,同步下拉横向可动电极和纵向可动电极,从而使所有第一接合部与第二接合部分离,使得所有横向可动电极和纵向可动电极回弹至初始位置,进而提高消除锁位以及重新锁位的效率。
285.可动上电极的材料为导电材料。本实施例中,可动上电极的材料为金属材料,金属材料包括铝、铜或钨。在其他实施例中,可动上电极的材料为掺杂有离子的半导体材料。同理,第三纵向驱动电极也为导电材料。具体地,第三纵向驱动电极的材料为金属材料或掺杂有离子的半导体材料。
286.需要说明的是,在形成可动上电极之后,所述形成方法还包括:在可动上电极的顶面形成第四绝缘层(图未示);或者,在第一限位层的顶面形成第三纵向驱动电极之前,在第一限位层的顶面形成第五绝缘层,第五绝缘层还延伸至可移动平台的部分区域上;第三纵向驱动电极相应形成在第五绝缘层上。
287.以第四绝缘层为例,第四绝缘层用于实现可动上电极和第三纵向驱动电极之间的绝缘,从而在移动机构工作时,当可动上电极和第三纵向驱动电极之间具有电位差时,可动上电极和第三纵向驱动电极之间产生静电吸引力,且可动上电极和第三纵向驱动电极之间不会短路。同理,第五绝缘层也用于实现可动上电极和第三纵向驱动电极之间的绝缘。
288.第四绝缘层和第五绝缘层的材料为介质材料。本实施例中,第四绝缘层和第五绝缘层的材料可以为氮化硅。在其他实施例中,所述第四绝缘层和第五绝缘层的材料还可以为氧化硅、氮氧化硅等其他合适的介质材料。
289.参考图25,形成可移动平台200后,去除第三牺牲层230(如图23所示)、第三子牺牲层230(如图23所示)、第二牺牲层170(如图23所示)和第一牺牲层150(如图23所示)。
290.通过去除第三牺牲层230、第二牺牲层170和第一牺牲层150,使得导线164、纵向可动电极162、横向可动电极162以及第二接合部161悬空设置于支撑柱130、横向驱动电极140和固定平台100上方。
291.本实施例中,采用湿法刻蚀工艺,去除第三牺牲层230、第二牺牲层170和第一牺牲层150。湿法刻蚀工艺具有各向同性的刻蚀特性,从而能够将露出的第三牺牲层230、第二牺牲层170和第一牺牲层150去除干净。
292.需要说明的是,在限位区100b中,第一导电层160和绝缘层120相接触,即第一导电层160包覆第一牺牲层130,从而使得第一导电层160和支撑柱130之间的第一牺牲层130被保留,这相应提高了围壁结构250(如图21所示)的机械强度。
293.还需要说明的是,本实施例中,去除第三牺牲层230、第二牺牲层170和第一牺牲层150后,保留支撑住130,所述位移模块相应还包括支撑住130。在其他实施例中,根据实际需求,也可以去除支撑柱。
294.此外,本实施例采用半导体工艺形成所述移动机构,这有利于实现批量化生产、较低的工艺成本和较高的集成度。
295.图26至图27是本发明移动机构的形成方法第二实施例的结构示意图。
296.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:如图26所示,在所述第二接合部410的顶面形成啮合材料层400的步骤中,在与支撑柱420的侧面相垂直的方向上,所述啮合材料层400向所述支撑柱420的两侧延伸并覆盖部分的第一子牺牲层430。
297.如图27所示,形成第二子牺牲层(未标示)后,形成第三子牺牲层之前,所述形成方法还包括:刻蚀工作区(图未示)的部分厚度的第二子牺牲层(未标示)和啮合材料层400,将啮合材料层400和第二子牺牲层(未标示)图形化为第二啮合部450,所述第二啮合部450包
括凸起或凹陷,且剩余的啮合材料层400作为啮合延伸板440。
298.啮合延伸板440与可移动平台的第一接合部的啮合区域更大,这相应提高了第二接合部410与第一接合部的接合能力。
299.本实施例中,啮合延伸板440的材料可以为介质材料、金属材料或掺杂有离子的半导体材料。
300.相应的,后续形成第三子牺牲层的步骤中,第三子牺牲层覆盖图形化后的啮合材料层400和第二子牺牲层,即第三子牺牲层保形覆盖第二啮合部450和第一子牺牲层430。
301.需要说明的是,本实施例仅示意出了部分的工作区,因此,未示意出第二子牺牲层被刻蚀后的形貌。
302.后续制程还包括:在工作区(未标示)中,形成保形覆盖第二啮合部450和第一子牺牲层430的第三子牺牲层;形成覆盖第三子牺牲层的可移动平台,可移动平台具有与所述第二啮合部450相啮合的第一啮合部,所述第一啮合部包括凸起或凹陷。
303.后续制程与前述实施例相同,本实施例在此不再赘述。
304.对本实施例所述形成方法的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
305.图28至图29是本发明移动机构的形成方法第三实施例的结构示意图。
306.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:如图29所示,在支撑柱500的侧面形成横向驱动电极530的步骤中,还在支撑柱500的顶面形成第二纵向驱动电极540,第二纵向驱动电极540与横向驱动电极530相隔离。
307.第二纵向驱动电极540与横向驱动电极530相隔离,从而能够分别对第二纵向驱动电极540与横向驱动电极530加载驱动信号。
308.横向可动电极带动可移动平台横向移动第一预设间距后,使所述第二纵向驱动电极540和第二接合部静电吸合,从而使所述第一接合部与第二接合部分离。因此,通过在支撑柱500的顶面形成第二纵向驱动电极540,以提高对第二接合部的下拉能力和效率,从而能够更快地使所述第一接合部与第二接合部分离。
309.具体地,形成横向驱动电极140和第二纵向电极540的步骤包括:如图28所示,形成驱动电极材料层520,驱动电极材料层520保形覆盖支撑柱500、绝缘层(未标示)和第二电极引脚(未标示);对驱动电极材料层520进行刻蚀处理,保留位于支撑柱500的侧面以及第三开口(未标示)中驱动电极材料层520作为横向驱动电极530,保留位于支撑柱500顶部的驱动电极材料层520作为第二纵向驱动电极520。
310.其中,在刻蚀处理的过程中,可以利用光罩定义驱动电极材料层520中需要被刻蚀的区域,从而使得位于支撑柱130侧面、位于第三开口123中以及位于支撑柱130顶部的驱动电极材料层520被保留。
311.需要说明的是,在本实施例中,在形成第二绝缘层(图未示)时,第二绝缘层还形成在第二纵向驱动电极520的顶面。
312.对本实施例所述形成方法的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
313.图30是本发明移动机构的形成方法第四实施例的结构示意图。
314.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:在第二牺牲层500上形成可移动平台520的步骤包括:在所述第二牺牲层500上形成第一接合部530,所述第一接合部530包括第一吸合电极530a;在所述第一接合部530上形成可动极板540,所述可动极板540和第一接合部530用于构成可移动平台500。
315.本实施例中,所述第二接合部510用于作为第二吸合电极,所述第一吸合电极530a和第二吸合电极能够静电吸合,从而使得第一接合部530和第二接合部510之间能够通过静电吸合的方式实现接合。
316.本实施例中,可移动平台520与第二接合部510通过第二牺牲层500相间隔,后续去除第二牺牲层500后,可移动平台520悬空设于所述第二接合部510上方。
317.第一吸合电极530a的材料为导电材料。本实施例中,第一吸合电极530a的材料为金属材料。在其他实施例中,可动下电极的材料为掺杂有离子的半导体材料。
318.需要说明的是,在形成第一导电层之后,所述形成方法还包括:在第二接合部510的表面形成第六绝缘层(图未示);或者,在形成第一接合部530之前,在第二牺牲层500上形成第七绝缘层(图未示)。
319.以第六绝缘层为例,第六绝缘层用于实现第二接合部510和第一接合部530之间的绝缘,从而在移动机构工作时,当第二接合部510和第一接合部530之间具有电位差时,第二接合部510和第一接合部530之间产生静电吸引力,且第二接合部510和第一接合部530之间不会短路。同理,第七绝缘层也用于实现第二接合部510和第一接合部530之间的绝缘。
320.第六绝缘层和第七绝缘层的材料为介质材料。本实施例中,第六绝缘层和第七绝缘层的材料可以为氮化硅。在其他实施例中,第六绝缘层和第七绝缘层的材料还可以为氧化硅、氮氧化硅等其他合适的介质材料。
321.在其他实施例中,形成第二牺牲层的步骤包括:在形成第一导电层后,形成覆盖第一导电层的第一子牺牲层,第一子牺牲层与顶部电极的顶面相齐平。
322.形成第一子牺牲层后,所述形成方法还包括:在所述第二接合部的顶面形成啮合材料层,且在与所述支撑柱的侧面相垂直的方向上,所述啮合材料层向所述支撑柱的两侧延伸并覆盖部分的所述第一子牺牲层,所述啮合材料层用于作为啮合延伸板。
323.形成第二牺牲层的步骤相应还包括:在啮合材料层露出的第一子牺牲层上形成第二子牺牲层,第二子牺牲层与啮合材料层的顶面相齐平,第二子牺牲层和第一子牺牲层用于构成第二牺牲层。
324.与第二接合部相比,啮合延伸板与第一吸合电极的接触面积更大,啮合延伸板与第一吸合电极的静电吸合力更强,这相应提高了第二接合部和第一接合部的接合能力。在这种方案中,所述啮合延伸板的材料为导电材料。
325.相应的,为了使可移动平台悬空设置于第二接合部上方,形成可移动平台之前,所述形成方法还包括:在工作区中,形成覆盖锁位材料层和第二子牺牲层的第三子牺牲层。因此,形成可移动平台相应形成于第三子牺牲层上。
326.对本实施例所述形成方法的具体描述,可参考前述实施例中的相应描述,本实施例在此不再赘述。
327.相应的,本发明还提供一种前述实施例的移动机构的驱动方法。
328.本实施例提供的驱动方法用于驱动本发明实施例提供的移动机构,从而使本发明
实施例提供的移动机构能够实现对被移动部件的移动。
329.通过本发明实施例提供的驱动方法,从而能够使移动机构能够正常工作,。具体地,控制单次移动的步长为预设移动步长,单次移动的步长小,从而使可移动平台发生周期性的小步长移动累积以实现较大的位移,且有利于实现对被移动部件的位移的精确控制。
330.为使本发明实施例的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
331.结合参考图1和2,图1是本发明移动机构一实施例的俯视图,图2是本发明移动机构一实施例的剖视图。
332.本实施例中,所述驱动方法包括:执行初始驱动处理,使横向可动电极22、纵向可动电极23、第一纵向驱动电极11b和横向驱动电极13处于浮接(floating)状态,并使第一接合部28与第二接合部21接合。
333.通过使使第一接合部28与第二接合部21接合,从而将可移动平台27的位置固定,进而避免可移动平台27发生无定态游荡的问题,相应精确控制被移动部件的位置。
334.本实施例中,所述第一接合部28包括第一啮合部28a,所述第一啮合部28a包括凸起或凹陷,所述第二接合部21包括能够与所述第一啮合部28a相啮合的第二啮合部26,所述第二啮合部26a包括凸起或凹陷,第一啮合部28a与第二啮合部26相啮合,从而使第二接合部21和第一接合部28通过相啮合的方式实现物理锁位。
335.本实施例中,使横向可动电极22、纵向可动电极23、第一纵向驱动电极11b和横向驱动电极13处于浮接状态,防止横向可动电极22与横向驱动电极13之间产生静电吸引力、纵向可动电极23与第一纵向驱动电极11b之间产生静电吸引力,从而使横向可动电极22能够沿横向发生移动。
336.本实施例中,所述驱动方法还包括:在执行初始驱动处理之后,执行一次或多次的位移处理。
337.每一次位移处理使可移动平台27沿横向移动第一预设间距,单次移动的步长小,因此,通过执行多次的位移处理,从而使可移动平台27发生周期性的小步长移动累积以实现较大的位移,进而使被移动部件实现较大的移动行程,且有利于实现对被移动部件的位移的精确控制辨。
338.如图2所示,位移处理的步骤包括:执行第一子位移处理,向横向可动电极22加载第一驱动信号,向与横向可动电极22相对的横向驱动电极13加载第二驱动信号,使横向驱动电极13与相对应的横向可动电极22之间具有第一静电吸引力,第一静电吸引力用于使横向驱动电极13和横向可动电极22静电吸合。
339.在横向驱动电极13的驱动下,使横向可动电极22向相对应的横向驱动电极13移动第一预设间距,由于第一接合部28与第二接合部21接合,第二接合部21相应带动可移动平台27沿横向移动第一预设间距,进而使可移动平台27发生微小的位移。
340.本实施例中,在执行第一子位移处理的过程中,向横向可动电极22加载第一驱动信号,向横向驱动电极13加载第二驱动信号,使横向驱动电极13与相对应的横向可动电极22之间具有第一电位差,第一电位差用于使横向驱动电极13与相对应的横向可动电极22之间具有第一静电吸引力。
341.具体地,通过第一电极引脚11a使固定电极25接通第一电位,通过第二电极引脚
11c使横向驱动电极13接通第二电位。其中,第一电位和第二电位不同,从而使横向驱动电极13与横向可动电极22之间具有第一电位差,进而使横向驱动电极13与横向可动电极22之间具有第一静电吸引力。例如,第二电位低于第一电位,或者,第一电位低于第二电位。
342.需要说明的是,在实际应用中,所述第一电位差需要与横向驱动电极13的材料和侧面表面积、横向可动电极22的材料、横向驱动电极13与横向可动电极22的接触面的粗糙度等因素互相配合,使得第一电位差产生的第一静电吸引力能够使横向驱动电极13与横向可动电极22之间互相吸合。
343.如图1所示,本实施例中,移动机构包括多个相隔离的位移模块20,移动机构中的多个位移模块20在固定平台10上呈阵列式排布。
344.具体地,多个所述位移模块20中的所述横向驱动电极13与横向可动电极22的相对方向均相同,因此,向所有位移模块20中的横向可动电极22加载第一驱动信号,向所有位移模块20中的横向驱动电极13加载第二驱动信号,从而使所有横向可动电极22向相同的平移方向(如图2中x1方向或x2方向所示)移动。
345.本实施例中,位于支撑柱12一侧的横向驱动电极13作为第一横向驱动电极13a,位于支撑柱12另一侧的横向驱动电极13作为第二横向驱动电极13b,第一横向驱动电极13a用于驱动横向可动电极22沿第一平移方向(如图2中x1方向所示)发生位移,第二横向驱动电极13b用于驱动横向可动电极22沿第二平移方向(如图2中x2方向所示)发生位移。其中,同一个移动方向包括第一平移方向和第二平移方向,第一平移方向和第二平移方向相反,从而使横向可动电极22能够左右移动,进而带动可移动平台10左右移动。
346.本实施例以驱动横向可动电极22向第一平移方向移动为例进行说明,相应的,对第一横向驱动电极13a加载第二驱动信号,使第一横向驱动电极13a与相对应的横向可动电极22之间具有第一静电吸引力。
347.因此,与第一横向驱动电极13a相对设置的横向可动电极22向第一横向驱动电极13a靠拢时,位于第一横向驱动电极13a一侧的导线24沿移动方向发生拉伸形变,位于第二横向驱动电极13b一侧的导线24发生压缩形变。
348.本实施例中,横向可动电极22与相对应的横向驱动电极13之间具有第一预设间距p2,第一预设间距p2等于单次移动的步长。
349.如图2所示,所述位移处理的步骤还包括:在执行第一子位移处理后,执行第二子位移处理,固定可移动平台27,向纵向可动电极23加载第三驱动信号,向第一纵向驱动电极11b加载第四驱动信号,并向被加载第二驱动信号的横向驱动电极13加载第五驱动信号,使横向驱动电极13与横向可动电极22脱离,并使纵向可动电极23和第一纵向驱动电极11b之间具有第二静电吸引力,第二静电吸引力用于使所述第一纵向驱动电极11b和纵向可动电极23静电吸合,且使第一接合部28与第二接合部21分离。
350.通过进行第二子位移处理,使得纵向可动电极23在第一纵向驱动电极11b的驱动下向固定平台10移动,从而使第一接合部28与第二接合部21分离,进而为横向可动电极22和纵向可动电极23的归位做准备。其中,在第二子位移处理的过程中,固定可移动平台27,从而固定可移动平台27的位置。
351.本实施例中,在执行第二子位移处理的过程中,向纵向可动电极23加载第三驱动信号,向第一纵向驱动电极11b加载第四驱动信号,使纵向可动电极23和第一纵向驱动电极
11b之间具有第二电位差,第二电位差使纵向可动电极23和第一纵向驱动电极11b之间具有第二静电吸引力。
352.具体地,向纵向可动电极23加载第三驱动信号的步骤包括:仍通过第一电极引脚11a使固定电极25接通第一电位;向第一纵向驱动电极11b加载第四驱动信号的步骤包括:使第一纵向驱动电极11b接通第三电位。其中,第一电位和第三电位不同,从而使纵向可动电极23和第一纵向驱动电极11b之间具有第二电位差。例如,第三电位低于第一电位,或者,第一电位低于第三电位。
353.本实施例中,在执行第二子位移处理的过程中,向被加载第二驱动信号的横向驱动电极13加载第五驱动信号,使横向驱动电极13处于浮接状态。例如,向第一横向驱动电极13a加载第五驱动信号。通过使横向驱动电极13处于浮接状态,使得横向可动电极22和相对应的横向驱动电极13之间的静电吸引力消失,从而使横向驱动电极13与横向可动电极22脱离,进而在第一纵向驱动电极11b的驱动下,易于使得纵向可动电极23向固定平台10移动。
354.在其他实施例中,在执行第二子位移处理的过程中,也可以为:向所述纵向可动电极加载第三驱动信号,向被加载第二驱动信号的横向驱动电极加载第五驱动信号,使横向驱动电极与横向可动电极之间具有第六静电吸引力,第六静电吸引力小于第一静电吸引力,第六静电吸引力用于使横向驱动电极与横向可动电极脱离。其中,第六静电吸引力小于第一静电吸引力,从而减小横向驱动电极与横向可动电极之间的静电吸引力,进而使横向驱动电极与横向可动电极脱离。
355.在这种方案中,使横向驱动电极与横向可动电极之间具有第六电位差,第六电位差使横向驱动电极与横向可动电极之间具有第六静电吸引力。具体地,仍通过第一电极引脚使固定电极接通第一电位,通过第二电极引脚使横向驱动电极接通第四电位,其中,第一电位和第四电位不同,从而使横向驱动电极与横向可动电极之间具有第六电位差,且第六电位差小于第一电位差,进而使第六静电吸引力小于第一静电吸引力。
356.本实施例中,在向纵向可动电极23加载第三驱动信号、以及向第一纵向驱动电极11b加载第四驱动信号之后,向被加载第二驱动信号的横向驱动电极13加载第五驱动信号,使横向驱动电极13与横向可动电极22脱离,从而避免因横向驱动电极13和横向可动电极22的脱离而带动可移动平台27发生移动。
357.本实施例中,移动机构包括多个相隔离的位移模块20,在执行第一子位移处理后,多个位移模块20分为多组;在执行第一子位移处理后,依次分别对多组的位移模块20执行第二子位移处理,用于固定可移动平台27。
358.例如:将多个位移模块20分为第一组和第二组,在执行第一子位移处理后,使第一组保持在进行第一子位移处理后的状态,也就是说,使第一组的位移模块20中的横向可动电极22与横向驱动电极13之间保持第一静电吸引力,先对第二组的位移模块20执行第二子位移处理,使第二组的位移模块20中的第一接合部28与第二接合部21分离,再对第一组的位移模块20执行第二子位移处理,从而始终保持部分位移模块20中的第二接合部21与第一接合部28接合,进而精确控制可移动平台27的位置。
359.如图2所示,所述位移处理的步骤还包括:在执行第二子位移处理后,执行第三子位移处理,向纵向可动电极23加载第六驱动信号,向第一纵向驱动电极11b加载第七驱动信号,并使横向驱动电极13处于浮接状态,用于使纵向可动电极23和第一纵向驱动电极11b脱
离,所述横向可动电极22和纵向可动电极23回弹,并使第一接合部28与第二接合部21接合。
360.通过进行第三子位移处理,使横向可动电极22和纵向可动电极23回到初始位置,并重新实现第一接合部28与第二接合部21的接合,从而为进行下一次位移处理做准备。
361.本实施例中,在执行第三子位移处理的过程中,向纵向可动电极23加载第六驱动信号,使纵向可动电极23处于浮接状态,向第一纵向驱动电极11b加载第七驱动信号,使第一纵向驱动电极11b处于浮接状态。
362.纵向可动电极23、横向可动电极22、横向驱动电极13和第一纵向驱动电极11b均处于浮接状态,因此,横向可动电极22与横向驱动电极13之间不具有静电吸引力,纵向可动电极23与第一纵向驱动电极11b之间也不具有静电吸引力,导线24能够回弹到原状,从而带动纵向可动电极23、横向可动电极22、和第二接合部21回弹至初始位置,并重新实现第一接合部28与第二接合部21的接合。
363.在其他实施例中,也可以向纵向可动电极加载第六驱动信号,向第一纵向驱动电极加载第七驱动信号,使纵向可动电极和第一纵向驱动电极之间具有静电排斥力,从而加强第一接合部与第二接合部的接合强度。具体地,向纵向可动电极加载第六驱动信号,向第一纵向驱动电极加载第七驱动信号,使纵向可动电极和第一纵向驱动电极之间具有相等电位。
364.需要说明的是,在其他实施例中,多个位移模块中的横向驱动电极与横向可动电极的相对方向相互垂直。具体地,部分位移模块用于驱动可移动平台沿第一横向发生位移,剩余的位移模块用于驱动可移动平台沿第二横向发生位移,所述第一横向与第二横向相垂直;相应的,部分的位移模块中的横向驱动电极与横向可动电极的相对方向与第一横向相同,剩余位移模块中的横向驱动电极与横向可动电极的相对方向与第二横向相同
365.在这种方案中,在执行位移处理的过程中,对第一横向相对应的位移模块执行第一次数的位移处理,对第二横向相对应的位移模块执行第二次数的位移处理。
366.具体地,第一次数和第二次数可以不同,也可以相同。其中,通过分别对第一横向相对应的位移模块执行第一次数的位移处理,以及对第二横向相对应的位移模块执行第二次数的位移处理,使得可移动平台能够在沿第一横向和第二横向分别发生移动,从而使可移动平台实现二维平面的移动。
367.本发明还提供前述移动机构的另一种驱动方法。结合参考图7,图7是本发明移动机构另一实施例的剖视图。
368.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:
369.如图7所示,所述移动机构还包括:第二纵向驱动电极44,位于支撑柱46的顶面,第二纵向驱动电极44与横向驱动电极(未标示)相隔离,所述第二纵向驱动电极44和所述第二接合部41能够静电吸合。
370.相应的,在执行第二子位移处理的过程中,还向第二纵向驱动电极44加载第十二驱动信号,使第二接合部41和第二纵向驱动电极44之间具有第五静电吸引力,第五静电吸引力用于使第二接合部41和第二纵向驱动电极44吸合。
371.与第一纵向驱动电极43相类似,所述横向可动电极带动可移动平台45横向移动第一预设间距后,使所述第二纵向驱动电极44和第二接合部41静电吸合,从而使所述第二接
合部41与第一接合部47分离。因此,通过在支撑柱46的顶面设置第二纵向驱动电极44,以提高对第一接合部47的下拉能力和效率,从而能够更快地使所述第二接合部41与第一接合部47分离。
372.具体地,在执行第二子位移处理的过程中,还向第二纵向驱动电极44加载十二驱动信号,使第二接合部41和第二纵向驱动电极44之间具有第五电位差,第五电位差使第二接合部41和第二纵向驱动电极44之间具有第五静电吸引力。
373.对所述驱动方法的具体描述,可结合参考前述实施例中的相应描述,在此不再赘述。
374.本发明还提供前述移动机构的又一种驱动方法。结合参考图9,图9是本发明移动机构又一实施例的剖视图。
375.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:
376.如图9所示,移动机构还包括:围壁结构(未标示),位于固定平台(未标示)上,围壁结构围成空腔(未标示);顶部限位结构63,位于所述围壁结构远离固定平台的一端,且悬空延伸至可移动平台60的部分区域上。
377.其中,横向可动电极和可移动平台60位于空腔中,所述可移动平台60上方设有第三纵向驱动电极64,所述第三纵向驱动电极64朝向可移动平台60,可移动平台60包括可动极板62以及位于可动极板62上的可动上电极61,可动上电极61与第三纵向驱动电极64能够分离和吸合。
378.相应的,在执行第二子位移处理的过程中,还向第三纵向驱动电极64加载第十驱动信号,向可动上电极61加载第十一驱动信号,使所述第三纵向驱动电极64和可动上电极61之间具有第四电位差,第四电位差使第三纵向驱动电极64和可动上电极61之间具有第四静电吸引力,第四静电吸引力用于使第三纵向驱动电极64和可动上电极61静电吸合,从而固定可移动平台60。
379.横向可动电极(未标示)带动可移动平台60横向移动第一预设间距(未标示)后,通过使所述可动上电极61与第三纵向驱动电极64吸合,从而通过第三纵向驱动电极64固定可移动平台60,在这种情况下,同步下拉横向可动电极和纵向可动电极(未标示),从而使所有第一接合部与第二接合部分离,使得所有横向可动电极和纵向可动电极回弹至初始位置,进而提高消除锁位以及重新锁位的效率。
380.对所述驱动方法的具体描述,可结合参考前述实施例中的相应描述,在此不再赘述。
381.本发明还提供前述移动机构的再一种驱动方法。结合参考图10,图10是本发明移动机构再一实施例的剖视图。
382.本发明实施例与前述实施例的相同之处在此不再赘述,本发明实施例与前述实施例的不同之处在于:所述第一接合部73包括第一吸合电极73a,所述可移动平台72还包括位于所述第一接合部73上的可动极板74;所述第二接合部71包括第二吸合电极71a。
383.相应的,在执行初始驱动处理的过程中,使所述第一吸合电极73a与所述第二吸合电极71a静电吸合。
384.使第一接合部73和第二接合部71接合的步骤包括:向第二吸合电极71a加载第八
驱动信号,向第一吸合电极73a加载第九驱动信号,使第一吸合电极73a和第二吸合电极71a之间具有第三静电吸引力,用于使第一吸合电极73a和第二吸合电极71a吸合。
385.第一吸合电极73a和第二吸合电极71a能够静电吸合,从而使得第一接合部73和第二接合部71之间能够通过静电吸合的方式实现接合,从而固定可移动平台72。
386.具体地,在执行初始驱动处理的过程中,向第二接合部71加载第八驱动信号,向第一接合部73加载第九驱动信号,使第一接合部73和第二接合部71之间具有第三电位差,第三电位差使第一接合部73和第二接合部71之间具有第三静电吸引力。
387.对所述驱动方法的具体描述,可结合参考前述实施例中的相应描述,在此不再赘述。
388.相应的,本发明实施例还提供一种电子设备。参考图31,示出了本发明电子设备一实施例的结构示意图。
389.本发明实施例的电子设备700包括:被移动部件;本发明提供的移动机构。
390.其中,所述被移动部件包括图像传感器、射频发生器、镜片、棱镜、光栅或波导。
391.通过本发明实施例提供的移动机构移动所述被移动部件,有利于实现较大的行程和精准的位移,还有利于降低工艺成本,有利于提高用户对所述电子设备700的使用感受度。
392.所述电子设备可以为中间组件,例如:成像装置、镜头组件等。所述电子设备还可以为终端设备,例如:所述电子设备700可以为手机、平板电脑、照相机或摄像机等各种具备拍摄功能的设备。
393.作为一种示例,当被移动部件为图像传感器时,电子设备700可以为成像装置,通过采用所述移动机构移动所述图像传感器,并通过精确控制移动机构的单次移动步长实现超分辨;同时,通过精确控制多步移动以实现行程大的效果,从而使得所述图像传感器对成像点发生的位移进行补偿,进而实现光学防抖。
394.而且,与移动镜头的方式相比,图像传感器的尺寸更小、重量更低,通过移动图像传感器实现光学防抖,有利于节约成本、提高光学防抖的便利性和稳定性,且本发明提供的移动机构具有行程大、移动精度高、速度快的优点,从而有利于实现对图像传感器的精密平移,以实现超分辨,同时提高电子设备用于光学防抖的有效性和精确性,相应提高成像质量。
395.作为一种示例,当所述电子设备700为具备拍摄功能的终端设备时,本发明实施例的电子设备700中,能够通过移动机构移动图像传感器,从而同时实现超分辨和光学防抖。
396.而且,与移动镜头的方式相比,图像传感器的尺寸更小、重量更低,通过移动图像传感器实现光学防抖,有利于节约成本、提高光学防抖的便利性和稳定性,且本发明提供的移动机构具有行程大、移动精度高、速度快的优点,从而有利于实现对图像传感器的精密平移,以实现超分辨,同时提高所述成像组件用于光学防抖的有效性和精确性,相应提高成像质量,例如:提高成像清晰度,相应提高了电子设备700的拍摄质量,还有利于提高用户的使用感受度。
397.相应的,本发明实施例还提供一种成像装置,包括:本发明实施例提供的移动机构;被移动部件,固定于可移动平台上,所述被移动部件为图像传感器。
398.通过本发明实施例提供的移动机构移动所述被移动部件,有利于实现较大的行程
和精准的位移,从而提高成像质量。
399.本实施例中,所述被移动部件为图像传感器。
400.具体地,所述成像装置还包括:与所述图像传感器对应的镜头组件,所述镜头组件位于所述图像传感器上方,并由所述移动机构外围的固定框架支撑。
401.因此,本实施例提供的移动机构用于移动图像传感器,镜头组件与图像传感器对应且位于图像传感器上方,以调节光路,清晰成像;通过采用所述移动机构移动图像传感器,从而实现超分辨;同时使得图像传感器对成像点发生的位移进行补偿,从而实现光学防抖。
402.而且,与移动镜头组的方式相比,图像传感器的尺寸更小、重量更低,通过移动图像传感器实现光学防抖,有利于节约成本、提高光学防抖的便利性和稳定性,且本发明提供的移动机构具有行程大、移动精度高、速度快的优点,从而有利于实现对图像传感器的精密平移,以实现超分辨,同时提高所述成像装置用于光学防抖的有效性和精确性,相应提高成像质量。
403.本实施例中,所述固定平台包括集成电路板,或者,所述固定平台位于集成电路板上;所述横向驱动电极、横向可动电极、第一纵向驱动电极、纵向可动电极和导线电性连接所述集成电路板。
404.本实施例中,所述移动机构采用半导体工艺形成,所述移动机构与成像装置的驱动电路的制备工艺具有较高的工艺兼容性,也就是说,可以在同一半导体制程中形成所述移动机构和集成电路板。
405.在其他实施例中,还可以在同一半导体制程中形成所述移动机构和图像传感器。此外,所述移动机构采用半导体工艺形成,因此,当采用封装工艺制备所述成像装置时,能够采用晶圆级封装的方式制备所述成像装置,从而有利于提高了封装效率和封装可靠性。
406.具体地,所述图像传感器包括cmos图像传感器或ccd图像传感器。
407.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。