1.本实用新型涉及电动机启动的软启动器。
背景技术:
2.现有的双速起动控制器由于无双速分频起动,只有调压加限流功能,不能有效的提高转矩,无法实现双速起动器的重载软起动,且存在起动电流较大的问题,在重载下无法正常运行。并且在过去设计中控制线路一般采用继电器控制,控制线路复杂,增加装配和维修的难度。
技术实现要素:
3.本实用新型是为了解决现有的双速起动控制器无双速分频起动不能有效的提高转矩,无法重载软起动的问题。现提供真空交流软起动器。
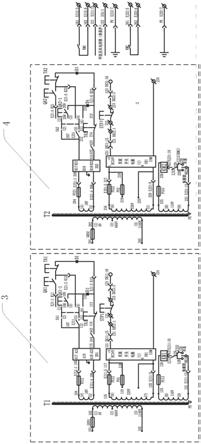
4.本实用新型的真空交流软起动器,包括控制回路、控制系统和主回路,
5.控制系统通过控制回路对主回路中的电动机进行启停,
6.主回路包括第一子回路和第二子回路;
7.第一子回路包括阻容器xr1、吸收及抑制器x1、阻容吸收装置rc1和交流接触器km1;电动机m1通过交流接触器km1主触点连接吸收及抑制器x1的一端,吸收及抑制器x1 的另一端、阻容吸收装置rc1的输出端和阻容器xr1的输出端均连接在交流接触器km1 主触点与电动机m1之间的三根电源线上;
8.两个交流接触器km1常闭触点与三个中间继电器zj13常开触点串联后一端连接在交流接触器km1主触点与电动机m1之间的一根电源线上;
9.第二子回路包括阻容器xr2、吸收及抑制器x2、阻容吸收装置rc2和交流接触器km2;电动机m2通过交流接触器km2主触点连接吸收及抑制器x2的一端,吸收及抑制器x2 的另一端、阻容吸收装置rc2的输出端和阻容器xr2的输出端均连接在交流接触器km2 主触点与电动机m2之间的三根电源线上;
10.两个交流接触器km2常闭触点与三个中间继电器zj13常开触点串联后一端连接在交流接触器km2主触点与电动机m2之间的一根电源线上。
11.本发明的有益效果为:
12.真空交流软起动器以plc控制器作为控制核心。在电动机的起动过程中,根据用户预设的曲线(包括调频起动)对电动机进行自动控制,并保证起动加速度控制在0.1m/s2≤a ≤0.3m/s2范围内,使其平滑可靠地完成起动过程。当电动机起动过程完成后,km1(km2) 交流接触器吸合,使电动机投入电网全压运行。本技术起动方式采用电压时间斜坡方式和起动电流限制功能,并兼有调频软起动功能。起动电流小,双速起动速度平稳提升,并可有效地提高双速电动机的起动转矩。解决了常规双速起动器没有软起功能,重载起动难和起动电流大以及不稳定的问题。同时减小因直接起动或星/角起动产生的过大起动转矩对电网的冲击,减少电动机起动时对机械传动系统的冲击。该机也可以根据现场情况要求,设置为
线圈的另一端连接中间继电器zj22常开触点的一端,中间继电器zj22常开触点的另一端同时连接单刀双掷开关nk22的1号静触点和中间继电器zj12常闭触点的一端,中间继电器zj12常闭触点的另一端连接单刀双掷开关nk22的2号静触点,单刀双掷开关nk22的动触点连接变压器t2副边三次绕组的另一端;
37.进一步地,如图3所示,控制系统包括plc控制电路,
38.plc控制电路包括s7
‑
200smartplc继电器控制器、中间继电器zj13、中间继电器zj23、电解电容c1
‑
c2、单刀双掷开关nk11和单刀双掷开关nk21;
39.s7
‑
200smartplc继电器控制器的1m端连接电解电容c1的负极,电解电容c1的正极同时连接先导模块xd1联动常开触点的一端、单刀双掷开关nk11的动触点和单刀双掷开关nk12的动触点,s7
‑
200smartplc继电器控制器的i0.0端连接先导模块xd1联动常开触点的一端的另一端,s7
‑
200smartplc继电器控制器的i0.1端连接单刀双掷开关nk11的 1号静触头和2号静触头,且单刀双掷开关nk11的2号静触头上设有一路旁路继电器常开触点,s7
‑
200smartplc继电器控制器的i0.2端连接单刀双掷开关nk12的1号静触头;
40.s7
‑
200smartplc继电器控制器的2m端连接电解电容c2的负极,电解电容c2的正极同时连接先导模块xd2联动常开触点的一端、单刀双掷开关nk21的动触点和单刀双掷开关nk22的动触点,s7
‑
200smartplc继电器控制器的i0.4端连接先导模块xd2联动常开触点的一端的另一端,s7
‑
200smartplc继电器控制器的i0.5端连接单刀双掷开关nk21的 1号静触头和2号静触头,且单刀双掷开关nk21的2号静触头上设有二路旁路继电器常开触点,s7
‑
200smartplc继电器控制器的i0.6端连接单刀双掷开关nk22的1号静触头;
41.如图5所示,k3
‑
2和k1
‑
2作为先导模块xd1和先导模块xd2联动常开触点。
42.s7
‑
200smartplc继电器控制器的q0.0端、q0.1端、q0.2端、q0.3端、q0.4端和q0.5 端分别连接中间继电器zj11线圈的一端、中间继电器zj12线圈的一端、中间继电器zj13 线圈的一端、中间继电器zj21线圈的一端、间继电器zj22线圈的一端和中间继电器zj23 线圈的一端;
43.中间继电器zj11
‑
zj13的另一端和s7
‑
200smartplc继电器控制器的1l端作为第一直流电源输入端;
44.中间继电器zj21
‑
zj23的另一端和s7
‑
200smartplc继电器控制器的2l端作为第二直流电源输入端。
45.进一步地,如图4所示,控制系统还包括型号为rjb
‑
08mf2的保护器;
46.型号为rjb
‑
08mf2的保护器中1路先导的两个先导信号输入端分别连接型号为 zrf160301的先导模块xd1的两个先导信号输出端;两个先导信号输出端分别连接电解电容c1的正极和s7
‑
200smartplc继电器控制器的i0.0端;
47.型号为rjb
‑
08mf2的保护器中2路先导的两个先导信号输入端分别连接型号为 zrf160301的先导模块xd2的两个先导信号输出端;两个先导信号输出端分别连接电解电容c2的正极和s7
‑
200smartplc继电器控制器的i0.4端;
48.型号为rjb
‑
08mf2的保护器中1路继电器输出的两个联机信号输入端分别连接先导模块xd1联动常开触点的两端;两个旁路继电信号输出端分别连接一路旁路继电器常开触点的两端;
49.型号为rjb
‑
08mf2的保护器中1路继电器输出的两个联机信号输入端分别连接先
导模块xd2联动常开触点的两端;两个旁路继电信号输出端分别连接二路旁路继电器常开触点的两端。
50.rjb
‑
08mf2的保护器可以用现有的单片机根据功能需要进行替换,也可以采用多个 rjb
‑
07mf保护器进行组合替换使用。
51.进一步地,第一子回路1和第二子回路2均包括三个交流互感器,
52.型号为rjb
‑
08mf2的保护器的采集信号输入端通过三个交流互感器与2个子回路上电动机m1与交流接触器km1之间的三根电源线连接;
53.型号为rjb
‑
08mf2的保护器的开关控制信号输入端同时连接plc控制电路中电解电容c1的正极和电解电容c2的正极,
54.型号为rjb
‑
08mf2的保护器的2个漏电检测信号输入端分别连接交流接触器km1常闭触点与中间继电器zj13常开触点串联后的另一端,以及交流接触器km2常闭触点与中间继电器zj23常开触点串联后的另一端。
55.具体地,以下1路包括第一子回路1和第一控制单元3,2路包括第二子回路2和第二控制单元4。
56.软起动器可单回路工作也可双回路联机,也可以组成双速回路。
57.当多台同类型的设备由于工作流程,需要程序控制起动时,通过主机与从机通信,可以保证从机跟随主机工作,主机随从机故障停机而停机。
58.双回路联机时将rjb软启动控制器中“通信方式”菜单值设定为以下数据。
59.1回路设为11,表示带1个回路,2回路设为1,即2个回路联机工作。
60.如果四回路联机工作主机1回路设为13,表示1回路带另3个回路,从回路设为01、 02、03;即4个回路(一台整机)联机工作。
61.从属回路号不能重复和缺项。例如主机主回路为13,必须带1台从机共3个从属回路,并且3个从属回路的号码分别设为01、02、03。
62.接线腔接线方法:将主机485(a、b、gnd)线按手牵手方式接从机485(a、b、gnd) 线,如没有集线器不得以星型方式连接。
63.电气系统工作原理:
64.当电源变压器t1、t2得电,副边输出18v、220v、110v电压。其中18v供给先导回路;220v供rjb软启动控制器(控制系统)和开关电源;110v供给jz13(jz23)继电器控制回路和km11、km12(km21、km22)接触器控制回路。
65.软起动器以反并联的三组大功率晶闸管模块作为软起开关,以rjb多功能软启动控制器作为控制核心。在电动机的起动过程中,多功能软启动控制器根据用户预设的曲线(包括调频起动)对电动机进行自动控制,并保证起动加速度控制在0.1m/s2≤a≤0.3m/s2范围内,使其平滑可靠地完成起动过程。当电动机起动过程完成后,km12(km22)交流接触器吸合,使电动机投入电网全压运行。具体设置及运行模式及动作过程如下:
66.1、单路软起、软停(nk11软,nk12独顺联):
67.上电未启动前,q0.2闭合
→
1路zj13闭合进行漏电检测;
68.当拨动nk11路至软起且按下起动按钮qa1,xd1(1路先导输入)
→
1路xdo输出
→
plc的i0.0闭合
→
q0.0闭合
→
zj11闭合,1路识别起动开始软起;同时zj13断开,打开漏电检测回路;软起时间到达后,软起完成,旁路继电器闭合
→
plc的i0.1闭合 i0.0闭合
→
q0.1闭合
→
zj12闭合
→
km1闭合;
69.单路硬起(nk11硬,nk12独顺联):
70.当拨动nk11路至硬起且按下起动按钮qa1,xd1(1路先导输入)
→
1路xdo输出
→
plc的i0.0闭合
→
q0.0闭合
→
zj11闭合,同时plc的i0.1闭合 i0.0闭合
→
q0.1闭合
→ꢀ
zj12闭合
→
km1闭合;同时zj13断开,打开漏电检测回路;
71.单路软停(nk11软,nk12独顺联):
72.ta1
→
1路xdi断开,xdo输出断开(1路进入软停)
→
旁路继电器断开
→
plc的i0.1 断开
→
q0.1断开
→
zj12断开
→
km1断开
→
1路停机后故障断开0.45秒后
→
1路联机又合上开始软停,软停完成后,
→
联机继电器断开
→
先导xd1断,xdo断开
→
plc的i0.0断开
→
q0.0断开
→
q0.1断开
→
zj11断开
→
plc的q0.2定时闭合,漏电投入;
73.单路硬停(nk11硬,nk12独顺联):
74.ta1
‑‑‑
1路xd1断开,xdo输出断开(1路进入直停)
→
旁路继电器断开
→
1路故障断开0.45秒
‑‑‑
1路联机断,先导xd1,xdo断
→
plc的i0.0断开
→
q0.0,q0.1断开
→
zj11, zj12断开
→
km1断开
→
plc的q0.2定时闭合,漏电投入;
75.2、联机异步软起、软停:
76.上电未启动前,q0.2闭合
→
1路zj13闭合进行漏电检测;q0.5闭合
→
1路zj23闭合进行漏电检测;
77.当拨动nk11路至软起(nk21路也至软起)且按下起动按钮,xd1(1路先导输入)
ꢀ→
1路xdo输出
→
plc的i0.0闭合
→
q0.0闭合
→
zj11闭合1路识别起动,开始软起;zj13 断开,打开漏电检测回路;同时2路联机继电器同时闭合
→
plc的i0.4闭合
→
q0.3闭合,
→
zj21闭合,2路软起,1或2旁路继电器异步闭合
→
plc的i0.1闭合 i0.0闭合
→
q0.1闭合
→
zj12闭合
→
km1闭合,plc的i0.5 i0.4闭合
→
q0.4闭合
→
zj22闭合
→
km2闭合;
78.联机同步,后级均与主机1路参数同步:
79.上电未启动前,q0.2闭合
→
1路zj13闭合进行漏电检测;q0.5闭合
→
1路zj23闭合进行漏电检测;
80.当拨动nk11路至软起(nk21路也至软起)且按下起动按钮,xd1(1路先导输入)
ꢀ→
1路xdo输出
→
plc的i0.0闭合
→
q0.0闭合
→
zj11闭合,
→
1路识别起动
→
1,2路联机继电器同时闭合
→
plc的i0.4闭合
→
q0.5闭合
→
zj21闭合,
→
等待主从机全部软起完成信号
→
1,2旁路继电器同时闭合
→
plc的i0.1闭合 i0.0闭合
→
plc的i0.5 i0.4闭合
→
q0.1, q0.5闭合
→
zj12闭合,zj22闭合
→
km1,km2闭合。
81.从机接收到主机起动指令后,从机1路联机闭合,从机1路起动,向从机2路发出起动信号,时序与上述一致;
82.从机2路接收到1路起动指令后,联机闭合,从机2路起动,时序与上述一致。
83.双机同步与联机同步动作原理相同。
84.顺控软停(1路执行停止):
85.ta1
→
1路xdi断开
→
1路xdo断开(1路识别停机,1,2路全部进入停止延时或软停)
→
1,2路旁路继电器断开
→
plc的i0.1或i0.5断开
→
q0.1或q0.4断开
→
zj12或zj22 断开
→
km1或km2断开
→
停机后故障断开0.45秒
→
1,2路联机断,先导xdo断
→
plc 的i0.0或i0.4断开
→
q0.0或q0.3断开
→
zj11或zj21断开
→
plc的q0.2或q0.5定时闭合,漏电投入
86.注意,如果1路进入停机后,2路还在运行,则2路必须进入停机。
87.顺控异常停机(2路停机为例):
88.ta2
→
2路xd2断开,2路xdo断开(2路进入直接停机)
→
2路停机后故障断开0.45 秒
→
2路联机断,先导xdo断开
→
plc的i0.4断开
→
q0.3,q0.4断开
→
zj21,zj22断开
→
km2断开
→
plc的q0.5定时闭合,漏电投入,1路不受影响。
89.联控异常停机(2路停机为例):
90.ta2
→
2路xd2断开,2路xdo断开(2路进入直接停机)
→
2路停机后故障断开0.45 秒
→
2路联机断,先导xdo断
→
plc的i0.4断开
→
q0.3,q0.4断开
→
zj21,zj22断开
→ꢀ
km2断开
→
plc的q0.5定时闭合,漏电投入。
91.1路在2路停机时进入停止延时
→
旁路继电器断开
→
plc的i0.1断开
→
q0.1断开
→ꢀ
zj12断开
→
km1断开
→
停机后故障断开0.45秒
→
1路联机断,先导xdo断
→
plc的i0.0 断开
→
q0.0,q0.1断开
→
zj11断开
→
plc的q0.2定时闭合,漏电投入。
92.注意,如果1路进入停机后,2路还在运行,则2路必须进入停机。
93.3、双速
‑
低软高软起动、停止,(nk11软,nk21软,nk12双速,nk22双速):
94.联机同步:上电未启动前,q0.2闭合
→
1路zj13闭合进行漏电检测;q0.5闭合
→
2路 zj23闭合进行漏电检测;
95.当拨动nk11路至软起(nk21路也至软起)且按下起动按钮,xd1(1路先导输入)
ꢀ→
1路xdo输出
→
plc的i0.0闭合
→
q0.0,q0.2,闭合
→
zj11
→
1路起动,(同时zj13 断开,打开漏电检测回路)联机继电器闭合,2路起动等待
→
1路等待从机低速1路软起完成,旁路继电器闭合
→
plc的i0.1闭合 i0.0闭合
→
q0.1闭合
→
zj12闭合
→
km1闭合
→
1 路满足切换条件,等待从机1路满足条件
→
旁路继电器断开
→
plc的i0.1断开或收到满足切换条件信号
→
q0.1断开
→
zj12断开
→
km1断开,1路进入低速停机
→
等待从机2路可以启动信号
→
2路联机闭合
→
plc的i0.4闭合
→
q0.3,q0.5闭合
→
zj21闭合,(同时zj23 断开,打开漏电检测回路)
→
2路等待从机2路软起完成,旁路继电器闭合
→
plc的i0.5 i0.4 闭合
→
q0.4闭合
→
zj22闭合
→
km2闭合;
96.从机12路接收到主机起动指令后,从机1路联机闭合,从机1路起动,向从机2路发出等待起动信号,时序与上述一致;
97.从机2路接收到1路起动指令后,联机闭合,从机2路起动,时序与上述一致。
98.异步(低速,高速不用等待软起全部完成,低速停机不用等待全部满足条件)动作过程同上。
99.4、双速低硬
‑
高硬起动、停止,(nk11硬,nk21硬,nk12双速,nk22双速):
100.当拨动nk11路至硬起(nk21路也至硬起)且按下起动按钮,xd1(1路先导输入)
ꢀ→
1路xdo输出
→
plc的i0.0闭合
→
q0.0,q0.2,闭合
→
zj11,(同时zj13断开,打开漏电检测回路)
→
1路起动,1路联机闭合,1路旁路闭合,2路起动等待
→
plc的i0.1闭合 i0.0闭合
→
q0.1闭合
→
zj12闭合
→
km1闭合
→
1路满足切换条件,旁路继电器断开
→ꢀ
plc接收到满足切换条件信号
→
q0.1断开
→
zj12断开
→
km1断开
→
1路低速停机
→
2路联机闭合,旁路闭合
→
plc的0.4闭合
→
q0.3,q0.5闭合
→
zj21闭合(同时zj23断开,打开漏电检测回路)
→
plc的i0.5闭合 i0.4闭合
→
q0.4闭合
→
zj22闭合
→
km2闭合。
101.从机12路接收到主机起动指令后,从机1路联机闭合,从机1路起动,向从机2路发
出等待起动信号,时序与上述一致。
102.从机2路接收到1路起动指令后,联机闭合,从机2路起动,时序与上述一致。
103.双速
‑
停机:
104.低速执行停机:
105.ta1
→
1路xd1,xdo断开(1路识别停机,1路进入停机等待,2路进入软停或停止延时)
→
2路旁路继电器断开
→
plc的i0.5断开
→
q0.4断开
→
zj22断开
→
km2断开
→
2路停机
→
1,2路的故障同时断开0.45秒后1,2路联机又合上开始软停,软停完成后,
→
联机继电器断开
→‑‑‑
1,2路联机断,先导断
→
plc的i0.0(i0.4)断开
→
q0.0(q0.3)断开
→ꢀ
zj11,zj21断开
→
plc的q0.2(q0.5)定时闭合,漏电投入。
106.注意,如果1路进入停机后,2路还在运行,则2路必须进入停机。
107.高速执行停机:
108.ta2按下或故障
→
2路xd2,xdo断开(2路识别停机,则2路进入直接停机)
→
2 路停机后,1,2路的故障同时断开0.45秒后,2路联机又合上开始软停,软停完成后,
→
联机继电器断开
→→
2路联机断,先导断
→
plc的i0.0(i0.4)断开
→
q0.0(q0.3)断开
→ꢀ
zj11,zj21断开
→
plc的q0.2(q0.5)定时闭合,漏电投入。
109.注意,如果1路进入停机后,2路还在运行,则2路必须进入停机。
110.5、仅低速软起,高速手动软起:
111.按下1路起动按钮,xd1输入(1路先导闭合)
→
1路xdo输出
→
plc的i0.0闭合
→ꢀ
q0.0,q0.2,q0.5闭合
→
zj11闭合
→
1路起动,1路联机闭合,2路起动等待
→
1路软起完成,旁路继电器闭合
→
plc的i0.1闭合 i0.0闭合
→
q0.1闭合
→
zj12闭合
→
km1闭合
→
1 路满足切换条件一直运行,从机收到主机起动指令后,1路联机闭合,从机1路起动,向从机2路发出等待起动信号,时序与上述一致。
112.高速手动,按下高速起动,首先必须主机1满足切换条件,否则不启动。2路按下手动
→
plc的i0.4闭合
→
q0.3,q0.5闭合
→
zj21闭合
→
1路进入低速停机,1路旁路继电器断开
→
i0.1断开
→
q0.1断开
→
zj12断开
→
km1断开
→
2路联机闭合
→
2路软启动
→
2路起动完成,旁路继电器闭合
→
plc的i0.5闭合 i0.4闭合
→
q0.4闭合
→
zj22闭合
→
km2闭合。
113.6、仅高速软起:
114.按下1路起动按钮
→
1路xd1输入(1路先导闭合)
→
1路xdo输出
→
plc的i0.0闭合
→
q0.0,q0.2,q0.5闭合
→
zj11闭合
→
1路进入低速停机
→
2路联机闭合,软启动
→
plc 的i0.4闭合
→
q0.3闭合
→
zj21闭合
→
2路起动完成,旁路继电器闭合
→
plc的i0.5闭合 i0.4 闭合
→
q0.4闭合
→
zj22闭合
→
km2闭合。
115.7、仅高速硬起:
116.按下1路起动按钮
→
1路xd1输入(1路先导闭合)
→
1路xdo输出
→
plc的i0.0闭合
→
q0.0,q0.2,q0.5闭合
→
zj11闭合
→
1路进入低速停机
→
2路联机闭合,旁路闭合
→ꢀ
plc的i0.5闭合 i0.4闭合
→
q0.4闭合
→
zj22闭合
→
km2闭合。
117.故障处理:
118.故障判断为实时判断,分别将zj11(zj21、zj31、zj41)、km12(km22、km32、 km42)的常开点引入到控制器的a14-a15、a14-a16作为故障反馈信号输入,这样在增加自动监测功能的同时也增加了新的故障点,为此我们对这些信号反馈回路也同时进行自动判断,这
种判断并不影响控制器的正常工作,只是在正常停机后显示故障内容,提示用户检修。进行自动判断是在启动和运行过程中,控制器自动对先导回路、中间回路、接触器回路进行工作状态检测,无故障时正常启动和运行,有故障时显示相应故障内容并停止启动和运行,等待处理及人工复位。
119.按下“起动”按钮5秒钟内不启动并且显示内容无变化,判定为“先导xd1回路故障”,检查先导xd1回路,修好后继续启动。
120.当起动zj11回路有故障时,告警“起动回路故障”,应断电检查zj11回路,修好后继续启动。
121.当接触器km1回路有故障时,告警“接触器回路故障”,应断电检查km1回路,修好后应能正常使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。