1.本发明涉及一种建筑机械。更具体地,本发明涉及一种具有动臂减振功能的建筑设备,其能够通过基于动臂控制角度值来控制阀芯来最小化由冲击引起的振动、延长设备的使用寿命并且减少驾驶员的工作疲劳。
背景技术:
2.通常,挖掘机是执行各种任务的建筑设备,各种任务诸如用于在施工现场等挖掘地面的挖掘、用于运送土壤的装载、用于制造地基的挖掘、用于拆除建筑物的破碎、用于清洁地面的分级以及用于平整地面的平整。
3.参照图1,诸如挖掘机的建筑设备1包括底盘2、可旋转地支撑在底盘2上的上部摆动体3、以及安装成在上部摆动体3上竖直操作的工作装置4。
4.另外,工作装置4由多关节构成,并且具备后端可旋转地支承在上部摆动体3上的动臂4a、后端可旋转地支承在动臂4a的前端上的斗杆4b、以及可旋转地安装在斗杆4b的前端侧的铲斗4c。另外,通过使用者操作杆而供给工作油,通过动臂液压缸5(工作用致动器)、斗杆液压缸6(工作用致动器)、铲斗液压缸7(工作用致动器)分别操作动臂4a、斗杆4b、铲斗4c。
5.这种建筑设备1通过其相应的手动控制杆操作诸如动臂4a、斗杆4b、铲斗4c等的工作装置4。然而,由于工作装置4通过连接到每个接头部而执行旋转运动,所以驾驶员需要相当大的努力来单独地操作每个工作装置4并且在预定区域内工作。
6.因此,为了便于这种工作,韩国专利no.10
‑
0974275公开一种用于挖掘机的减震装置及其方法。韩国专利('275)中公开的减震装置使用具有接近传感器的单独驱动装置,该接近传感器能够检测安装在预定位置的动臂液压缸的旋转角度,并且控制控制阀根据来自接近传感器的检测信号控制供给到动臂液压缸的液压油,以便在通过操作控制杆将挖掘机的动臂升高到最大高度的情况下防止发生震动。
7.另外,在沿着工作表面进行的传统跟踪工作的情况下,控制单元确定从铲斗端到工作表面的距离作为距离误差并且控制动臂消除该距离误差(图2)。换句话说,在斗杆操作期间,当铲斗端在工作表面的下部时,执行动臂上升操作以减小距离误差(
‑
),或者当铲斗端在工作表面的上部时,执行动臂下降操作以减小距离误差( )。
8.因此,需要根据距离误差快速且重复地执行动臂上升操作或动臂下降操作。然而,驾驶经验不足的驾驶员不能轻柔地操作控制杆,从而在突然操作期间由于工作装置的惯性而引起冲击。这种冲击不仅通过增加驾驶员的工作疲劳而降低工作效率,而且通过降低设备的耐用性而缩短使用寿命。
技术实现要素:
9.技术任务
10.本发明旨在解决现有技术的上述问题。本发明的目的是提供一种具有动臂减振功
能的建筑设备,其能够通过基于动臂控制角度值控制阀芯来最小化由冲击引起的振动、延长设备的使用寿命并且减少驾驶员的工作疲劳。
11.用于解决任务的手段
12.为了实现上述目的,根据本发明的一方面,本发明提供一种建筑设备,包括:底盘;上部摆动体,其可旋转地支撑在所述底盘上;工作装置,其由所述上部摆动体支撑并且包括通过相应液压缸进行操作的动臂、斗杆及铲斗;控制阀,其用于控制所述动臂液压缸;电子比例减压阀,其用于控制所述控制阀的阀芯;控制杆,其用于输出与驾驶员的控制量对应的控制信号;工作设定单元,其用于提供工作模式和目标工作表面设定功能;位置信息提供单元,其用于根据所述工作设定单元的工作设定来收集和/或计算所述工作装置的位置信息和已经设定的工作表面的位置信息;以及电子控制单元,其用于计算并且输出所述电子比例减压阀的动臂先导压力,其中,所述电子控制单元通过使用所述控制杆的所述控制信号和由所述位置信息提供单元所收集和/或计算的位置信息来控制所述动臂的操作。
13.根据本发明的实施例,所述电子控制单元可以将铲斗端部的位置设定为第一点,将所述动臂和所述斗杆的接头位置设定为第二点,并且将连接所述第一点和所述第二点的虚拟直线与所述工作表面之间的角度设定为动臂控制角度值。
14.根据本发明的实施例,所述电子控制单元可以计算所述动臂控制角度值,并且将所计算的动臂控制角度值与设定参考值进行比较。
15.根据本发明的实施例,所述电子控制单元可以在所述动臂控制角度值小于所述设定参考值的情况下确定所述动臂控制角度值处于动臂上升控制范围并且仅允许动臂上升运动,并且在所述动臂控制角度值大于所述设定参考值的情况下确定所述动臂控制角度值处于动臂下降控制范围并且仅允许动臂下降运动。
16.根据本发明的实施例,参考值可以是90
°
。
17.根据本发明的实施例,所述电子控制单元可以将所述动臂控制角度值计算为所述动臂角度值与所述工作表面的倾斜角之和,所述动臂角度值是所述第一点与所述第二点之间的切线角。
18.根据本发明的实施例,所述位置信息提供单元可以包括以下中的至少一个:用于测量所述建筑设备的位置信息的位置测量单元;用于测量所述建筑设备的姿态信息和相应工作装置的位置的姿态测量单元;以及用于基于从所述位置测量单元和所述姿态测量单元所测量的位置信息来计算坐标的坐标计算单元。
19.根据本发明的实施例,所述电子比例减压阀可以产生与所述电子控制单元的电信号相对应的液压,并且通过将所产生的液压传递到所述控制阀来操作所述控制阀中的所述阀芯。
20.根据本发明的实施例,所述控制杆可以产生与驾驶员的控制量成比例的电信号,并且将所述电信号提供给所述电子控制单元作为电操纵杆。
21.根据本发明的实施例,所述工作设定单元可以提供能够根据驾驶员的需要来设定的多个工作模式设定功能,并且根据所述工作模式设定而在显示屏上显示从所述位置信息提供单元所提供的所述建筑设备的地理信息、位置信息和姿态信息中的至少一个。
22.本发明的效果
23.根据本发明的方面,通过基于动臂控制角度值来控制控制阀的阀芯,可以防止由
动臂上升与动臂下降之间的切换操作引起的冲击。
24.而且,通过增加建筑设备的耐用性并且减少驾驶员的工作疲劳,可以提高工作效率。
25.此外,驾驶员可以容易地操作工作装置,而不管驾驶经验如何。
26.本发明的效果不限于上述效果,并且应当理解,本公开的效果包括可以从在本发明的详细描述或所附权利要求中描述的本发明的配置推断的所有效果。
附图说明
27.图1是示出根据现有技术的建筑设备的基本构造的立体图;
28.图2是示出在根据现有技术的建筑设备的斗杆操作期间动臂的运动的示意图;
29.图3是示出根据本发明的实施例的建筑设备的动臂减振功能的示意图;
30.图4是示出根据本发明的实施例的建筑设备的斗杆操作期间动臂的运动的示意图;以及
31.图5是示出根据本发明的实施例的用于控制建筑设备的动臂减振功能的方法的流程图。
具体实施方式
32.以下,将参照图1至图5详细解释本发明的实施例。
33.根据本发明的实施例的建筑设备100包括底盘10、可旋转地支撑在底盘10上的上部摆动体20、以及由上部摆动体20支撑的工作装置30。工作装置30包括通过相应的液压缸操作的动臂31、斗杆32和铲斗33。
34.此外,根据本发明的实施例的建筑设备100具有动臂震动减轻功能,其能够在沿着工作表面执行的跟踪工作期间最小化由动臂下降与动臂上升之间的切换引起的震动。
35.图3是示出根据本发明的实施例的建筑设备的动臂减振功能的示意图,图4是示出根据本发明的实施例的建筑设备的斗杆操作期间动臂的运动的示意图,图5是示出根据本发明的实施例的用于控制建筑设备的动臂减振功能的方法的流程图。
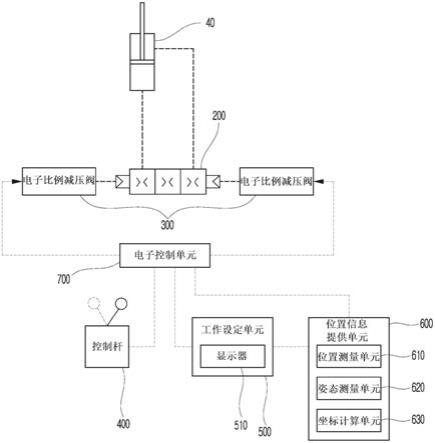
36.参照图3至图5,根据本发明的实施例的具有动臂减振功能的建筑设备100包括:底盘10;可旋转地支撑在底盘10上的上部摆动体20;由上部摆动体20支撑并且包括动臂31、斗杆32和铲斗33的工作装置30,所述动臂、斗杆和铲斗通过相应的液压缸操作;用于控制动臂液压缸40的控制阀200;用于控制阀200的阀芯的电子比例减压阀300;用于输出与驾驶员的控制量对应的控制信号的控制杆400;用于提供工作模式和目标工作面设定功能的工作设定单元500;用于根据工作设定单元500的工作设定来收集和/或计算工作装置的位置信息和已经设定的工作表面的位置信息的位置信息提供单元600;以及用于计算和输出用于电子比例减压阀300的动臂先导压力的电子控制单元700。
37.此时,根据本发明的实施例的电子控制单元700被构造成使用控制杆400的控制信号和由位置信息提供单元600收集和/或计算的位置信息来确定其是处于动臂上升范围还是动臂下降范围,并且当处于动臂上升范围时,仅允许动臂上升操作,而当处于动臂下降范围时,仅允许动臂下降操作。
38.控制阀200是用于通过在压力下沿轴向移动的阀芯来打开和关闭流动路径的构
件。即,控制阀200用于切换从作为液压源的液压泵向动臂液压缸40侧供给的工作油的供给方向。控制阀200通过液压管连接到液压泵,并且促使液压油从液压泵供应到动臂液压缸40。
39.电子比例减压阀300是电子操作阀,并且可以包括用于产生电磁力的螺线管单元和用作流体流动路径的阀单元。
40.电子比例减压阀300产生与由电子控制单元700施加的电信号相对应的液压,并且所产生的液压从电子比例减压阀300传递到控制阀200。来自电子比例减压阀300的液压压力使控制阀200中的阀芯轴向移动。
41.更具体地,当电子控制单元700确定处于动臂上升控制范围时,电子比例减压阀300根据从电子控制单元700输入的电信号可变地调节供应到控制阀200的阀芯的动臂上升信号压力。另外,当电子控制单元700确定处于动臂下降控制范围时,电子比例减压阀300根据从电子控制单元700输入的电信号可变地调节供给到控制阀200的阀芯的动臂下降压力。
42.控制杆400可以是液压操纵杆或电动操纵杆,并且优选地可以是电动操纵杆,其产生与驾驶员的控制量成比例的电信号并且将该电信号提供给电子控制单元700。
43.位置信息提供单元600可以包括以下中的至少一个:位置测量单元610,用于通过接收由全球定位系统(gps)卫星发送的信号来测量建筑设备100的位置信息;姿态测量单元620,用于测量建筑设备100的姿态信息以及动臂31、斗杆32和铲斗33中的至少一个的位置;以及坐标计算单元630,用于基于从位置测量单元和姿态测量单元所测量的位置信息来计算建筑设备100的坐标。
44.位置测量单元610可以包括能够接收由gps卫星发送的信号的接收器,并且从接收到的信号测量建筑设备100的位置信息。
45.姿态测量单元620使用多个惯性测量单元(imu)和角度传感器等测量动臂31、斗杆32和铲斗33中的至少一个的位置和/或姿态以及建筑设备100的主体的斜度。
46.坐标计算单元630使用从位置测量单元610和姿态测量单元620所测量的位置信息来计算动臂31、斗杆32和铲斗33中的至少一个的坐标(x,y,z)。
47.另外,位置信息提供单元600还可以包括映射单元,用于将工作位置周围的地理信息和关于工作位置的施工信息映射到计算出的坐标。映射单元通过根据坐标计算单元所计算的每个轴调整由姿态测量单元所测量的相应工作装置30的位置和/或姿态以及建筑设备100的主体的斜度来进行映射。
48.工作设定单元500可以包括工作模式设定功能,该工作模式设定功能可以根据驾驶员的需要以各种方式设定,例如工作区域限制模式、摆动位置控制模式等。
49.工作设定单元500根据工作模式设定,将从位置信息提供单元600提供的建筑设备100的地理信息、位置信息、姿态信息中的至少一个显示在显示器510的屏幕上。因此,驾驶员可以设定工作模式,并且根据所设定的模式而使用显示在显示器510的屏幕上的信息容易地工作。
50.当输入控制杆400的控制信号时,电子控制单元700从位置信息提供单元600接收位置信息,并且确定其是否处于动臂上升或动臂下降控制范围内。然后,电子控制单元700将用于控制阀200的电流信号输出到电子比例减压阀300。
51.换句话说,当根据本发明的动臂减振功能有效时,各种位置信息通过位置信息提
供单元600输入到电子控制单元700,并且电子控制单元700基于所收集的信息来控制动臂31的运动。
52.参照图3,根据本发明的具有动臂减振功能的建筑设备如下所示进行操作。
53.首先,驾驶员在工作设定单元500中设定为主动控制模式,并且操作斗杆控制杆400,使其跟踪工作表面。然后,位置信息提供单元600收集和/或计算工作装置30的位置信息和预定工作表面,并且将其提供给电子控制单元700。
54.电子控制单元700使用所提供的位置信息而根据动臂31、斗杆32和铲斗33的位置计算当前动臂角度值和设定工作表面角度值,并且通过反映动臂角度值和设定工作表面角度值来计算动臂控制角度值。
55.在此,所谓动臂角度值表示将铲斗33端部与斗杆32的接头相连接的虚拟直线与基面之间的角度。设定工作表面角度值表示基面与工作表面之间的角度。动臂控制角度值表示将铲斗33端部与斗杆32的接头相连接的虚拟直线与工作表面之间的角度。
56.接着,电子控制单元700将计算出的动臂控制角度值与预定基准值进行比较。
57.当动臂控制角度值小于参考值时,电子控制单元700确定其处于动臂上升控制范围,并且控制仅执行动臂上升操作。类似地,当动臂控制角度值大于基准值时,电子控制单元700确定其处于动臂下降控制范围,并且控制仅执行动臂下降操作。
58.另外,在动臂上升控制范围内,电子控制单元700通过操作控制杆400将与动臂上升期间所需的动臂上升所需缸流量对应的动臂上升先导压力输入到动臂上升侧处的电子比例减压阀300。类似地,在动臂下降控制范围内,电子控制单元700通过操作控制杆400将与动臂下降期间所需的动臂下降所需缸流量对应的动臂下降先导压力输入到动臂下降侧处的电子比例减压阀300。
59.电子比例减压阀300产生与从电子控制单元700输入的流量控制先导压力相对应的液压,并且所产生的液压被供应到控制阀200的阀芯。换句话说,电子比例减压阀300将液压供应到控制阀200的阀芯,以便在从电子控制单元700接收到动臂上升先导压力时执行动臂上升操作。类似地,电子比例减压阀300将液压供应到控制阀200的阀芯,以便在接收到动臂下降先导压力时执行动臂下降操作。
60.当液压被供应到用于动臂上升操作的控制阀200的阀芯时,产生到动臂液压缸40的活塞侧室的流动,因此动臂31由于动臂液压缸40的扩张而上升。类似地,当液压压力被供应到用于动臂下降操作的控制阀200的阀芯时,产生到动臂液压缸40的杆侧室的流动,因此动臂31由于动臂液压缸40的收缩而下降。
61.换句话说,在沿着工作表面执行跟踪工作时,电子控制单元700在要给出动臂下降信号的情况下不给出动臂上升信号,而在要给出动臂上升信号的情况下不给出动臂下降信号,以便防止因动臂下降与动臂上升之间的切换而引起的冲击的发生。
62.参照图4,将如下详细描述根据本发明的实施例的用于在斗杆32操作期间控制电子控制单元700的动臂31的方法。
63.电子控制单元700通过使用从位置信息提供单元600所提供的位置信息,根据每个工作装置的位置和设定工作表面角度值θ2计算当前动臂角度值θ1并且通过反映动臂角度值θ1和设定工作表面角度值θ2来计算动臂控制角度值θ3。
64.根据实施例,电子控制单元700可以将铲斗33端部的位置设定为第一点p1,并且将
斗杆32的接头位置设定为第二点p2。
65.在此,动臂角度值θ1表示在基面和将第一点p1与第二点p2相连接的虚拟直线k之间形成的角度。换句话说,动臂角度值表示第一点p1和第二点p2之间的切角。
66.另外,设定工作面角度值θ2表示基面和设定工作表面之间的角度。
67.此时,动臂控制角度值θ3表示设定工作面和将第一点p1与第二点p2相连接的虚拟直线k之间的角度。
68.另外,动臂控制角度值θ3通过反映动臂角度值θ1和设定工作表面角度值θ2来计算。换言之,动臂控制角θ3可以是动臂角度值θ1和设定工作平面角度值θ2之和。
69.接着,参照图4和图5,在建筑设备100沿着设定工作平面进行跟踪工作的情况下,驾驶员进行斗杆操作以将当前位于第一位置w1的铲斗33端部移动到第二位置w2。
70.此时,需要控制动臂31以执行动臂上升操作,使得铲斗33端部不侵入工作表面。
71.这里,第二位置w2是其中动臂控制角度θ3是90
°
的参考位置。此时的动臂控制角度值θ3是确定它是否处于动臂上升控制范围和动臂下降控制范围的基准值θ
t
。
72.当铲斗33端部处于第一位置w1时,动臂控制角度值θ3是动臂角度值θ1和设定工作表面角度值θ2的和,其小于参考值θ
t
,90
°
。换句话说,它表示铲斗33端部处于动臂上升控制范围。
73.因此,电子控制单元700仅允许动臂上升操作。换句话说,根据控制杆400的操作,与动臂上升所需缸流量对应的动臂上升先导压力被输入到动臂上升侧电子比例减压阀300。
74.另外,电子比例减压阀300将液压供应到控制阀200的阀芯,以便在从电子控制单元700接收动臂上升先导压力时执行动臂上升操作。
75.因此,控制阀200产生到动臂液压缸40的活塞侧室的流动,因此动臂31由于动臂液压缸40的扩张而上升。
76.换句话说,根据本发明,在沿着工作表面进行跟踪工作的同时给予动臂上升信号的情况下,通过不给予动臂下降信号,能够防止通过动臂下降与动臂上升之间的切换而引起的冲击。
77.在建筑设备100沿着设定工作表面继续进行跟踪工作的情况下,驾驶员进行斗杆操作以使位于第二位置w2的铲斗33端部向内移动。
78.此时,需要控制动臂31以执行动臂下降操作,使得铲斗33端部不偏离工作表面。
79.在进行斗杆操作以使铲斗33端部向内移动超过第二位置w2时,动臂控制角度值θ3是动臂角度值θ1与设定工作面角度值θ2的和,并且具有大于基准值θ
t
,90
°
的值。换句话说,这表示铲斗33端部处于动臂下降控制范围。
80.因此,电子控制单元700仅允许动臂下降操作。换句话说,根据控制杆400的操作,仅与动臂下降所需缸流量对应的动臂下降先导压力被输入到动臂下降侧电子比例减压阀300。
81.另外,电子比例减压阀300将液压供应到控制阀200的阀芯,以便在从电子控制单元700接收到动臂下降先导压力时执行动臂下降操作。
82.因此,控制阀200产生到动臂液压缸40的杆侧室的流动,因此动臂31由于动臂液压缸40的收缩而下降。
83.换句话说,根据本发明,在沿着工作表面进行跟踪工作的同时给予动臂下降信号的情况下,通过不给予动臂上升信号,能够防止通过动臂下降与动臂上升之间的切换而引起的冲击。
84.这样,通过允许基于动臂控制角度值来控制阀200的阀芯,可以防止由动臂31的切换操作引起的冲击。因此,通过增加建筑设备100的耐用性并减少驾驶员的工作疲劳,可以提高工作效率。
85.另外,驾驶经验充足的驾驶员或驾驶经验不足的驾驶员都可以容易地操作工作装置30。
86.为了说明的目的,已经呈现本发明的上述描述,并且对于本领域的普通技术人员来说,很明显,在不改变本发明的技术思想或必要特征的情况下,可以容易地将本发明修改为其它详细形式。
87.本发明的范围由所附权利要求书呈现,并且应当理解,从权利要求书的定义和范围及其等同物导出的所有改变或修改都落入本发明的范围内。
88.附图标记的描述
89.100:建筑设备
90.10:底盘
91.20:上部摆动体
92.30:工作装置
93.31:动臂
94.32:斗杆
95.33:铲斗
96.40:动臂液压缸(工作用致动器)
97.50:斗杆液压缸(工作用致动器)
98.60:铲斗液压缸(工作用致动器)
99.200:控制阀
100.300:电子比例减压阀
101.400:控制杆
102.500:工作设定单元
103.510:显示器
104.600:位置信息提供单元610:位置测量单元620:姿态测量单元630:坐标计算单元700:电子控制单元p1:第一点
105.p2:第二点
106.w1:第一位置
107.w2:第二位置θ1:动臂角度值θ2:工作表面角度值θ3:动臂控制角度值θ
t
:参考值
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。