技术特征:
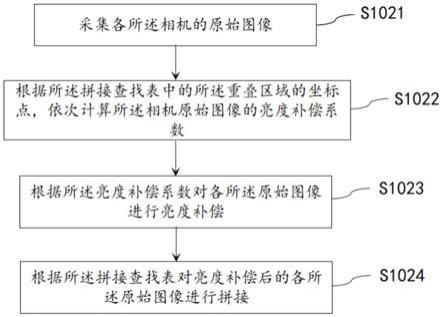
1.一种车载环视系统中的亮度均衡方法,其特征在于,所述方法包括线下标定和线上拼接,所述线下标定包括:对车载环视系统中的各相机进行内外参标定;根据所述内外参生成拼接查找表;根据鸟瞰图和所述拼接查找表确定各相邻两个图像的重叠区域,将所述重叠区域的坐标点存储于所述拼接查找表中;所述线上拼接包括:采集各所述相机的原始图像;根据所述拼接查找表中的所述重叠区域的坐标点,依次计算所述相机原始图像的亮度补偿系数;根据所述亮度补偿系数对各所述原始图像进行亮度补偿;根据所述拼接查找表对亮度补偿后的各所述原始图像进行拼接,得到亮度均衡的环视拼接图像。2.根据权利要求1所述的车载环视系统中的亮度均衡方法,其特征在于,所述重叠区域的坐标点具体为鸟瞰图上的重叠点根据所述内外参映射到各个所述相机的原始图像上的坐标点。3.根据权利要求1所述的车载环视系统中的亮度均衡方法,其特征在于,所述采集各所述相机的原始图像,其中,所述原始图像的格式为yuv格式或rgb格式,用于获取所述原始图像的亮度通道。4.根据权利要求3所述的车载环视系统中的亮度均衡方法,其特征在于,所述依次计算所述相机原始图像的亮度补偿系数,具体包括:根据所述亮度通道,依次计算各所述原始图像重叠区域的亮度均值信息;根据所有重叠区域相邻图像的所述亮度均值信息误差最小化及正则化约束,计算得到各个所述相机的第一亮度补偿系数;对各个所述相机的所述第一亮度补偿系数进行前后帧平滑,得到第二亮度补偿系数;所述第二亮度补偿系数用于对各所述相机的所述图像进行亮度补偿。5.根据权利要求4所述的车载环视系统中的亮度均衡方法,其特征在于,所述对各个所述相机的所述第一亮度补偿系数进行前后帧平滑采用高斯平滑的方式进行前后帧平滑。6.根据权利要求1所述的车载环视系统中的亮度均衡方法,其特征在于,所述相机的内外参标定方法包括:通过所述相机拍摄标定图案的图像;通过标定布图案对所述相机的位姿进行标定。7.根据权利要求1所述的车载环视系统中的亮度均衡方法,其特征在于,将所述重叠区域的坐标点存储于所述拼接查找表中时,所述重叠区域的坐标点可按倍率采样。8.根据权利要求1所述的车载环视系统中的亮度均衡方法,其特征在于,所述根据鸟瞰图确定各相邻两个图像的重叠区域时,所述重叠区域的位置选取根据车辆尺寸的不同而不同。9.根据权利要求1所述的车载环视系统中的亮度均衡方法,其特征在于,所述车载环视系统中的相机数量为四个,分别采集车辆的前方、后方、左方和右方的图像。10.一种车载环视系统中的亮度均衡系统,其特征在于,所述系统包括线下标定模块和线上拼接模块,所述线下标定模块包括:内外参标定子模块,用于对车载环视系统中的各相机进行内外参标定;
查找表生成子模块,用于根据所述内外参生成拼接查找表;重叠区域确定子模块,用于根据鸟瞰图确定各相邻两个图像的重叠区域,将所述重叠区域的坐标点存储于所述拼接查找表中;所述线上拼接模块包括:图像获取子模块,用于采集各所述相机的原始图像;亮度补偿系数计算子模块,用于根据所述拼接查找表中的所述重叠区域的坐标点,依次计算所述相机原始图像的亮度补偿系数;亮度补偿子模块,用于根据所述亮度补偿系数对各所述原始图像进行亮度补偿;拼接子模块,用于根据所述拼接查找表对亮度补偿后的各所述原始图像进行拼接。
技术总结
本申请提供了一种车载环视系统中的亮度均衡方法及系统,属于智能驾驶技术领域,具体包括线下标定和线上拼接,线下标定:对车载环视系统中的各相机进行内外参标定,根据内外参生成拼接查找表,根据鸟瞰图确定各相邻两个图像的重叠区域,将重叠区域的坐标点存储于拼接查找表中;线上拼接:采集各相机的原始图像,根据拼接查找表中的重叠区域的坐标点,依次计算原始图像的亮度补偿系数,根据亮度补偿系数对各原始图像进行亮度补偿,根据拼接查找表对亮度补偿后的各原始图像进行拼接,得到亮度均衡的环视拼接图像。通过本申请的处理方案,可以快速的调节环视拼接图的亮度均衡,提高了亮度补偿的实时性。补偿的实时性。补偿的实时性。
技术研发人员:张琴 仇开金 王念兵 陈岚
受保护的技术使用者:武汉极目智能技术有限公司
技术研发日:2021.07.22
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。