一种基于tcn和粒子滤波的关键设备剩余寿命预测方法
技术领域
1.本发明属于工业设备寿命预测技术领域,具体涉及一种基于tcn和粒子滤波的关键设备剩余寿命预测方法。
背景技术:
2.伴随着科技的进步和生产工艺的发展,越来越多的工业设备被投入到工业系统中使用,设备的性能会随着不断地使用而发生退化,最终会发生失效,为保障设备的安全性和可靠性,剩余寿命预测技术受到了广泛关注。
3.针对工业系统中关键设备的剩余寿命预测中存在的问题,提出一种基于tcn和粒子滤波的关键设备剩余寿命预测方法,相比于单一模型,该方法能够提高预测的精度和稳定性,为关键设备剩余寿命预测提供了进一步的参考。
技术实现要素:
4.本发明的目的是提供一种基于tcn和粒子滤波的关键设备剩余寿命预测方法,消除了建立单一模型对关键设备进行剩余寿命预测时精度不高的的影响,建立了更加精确的混合模型,提高了模型的预测精度。
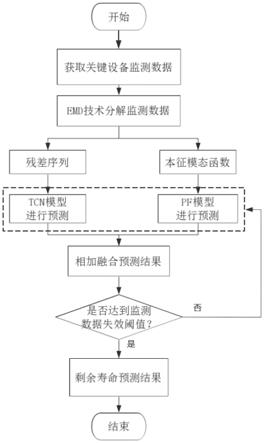
5.本发明所采用的技术方案是,一种基于tcn和粒子滤波的关键设备剩余寿命预测方法,具体按照以下步骤实施:
6.步骤1、获取关键设备的监测数据值c
i
,i=1,2,...,n,其中c
i
表示获取的该关键设备的第i个监测数据值,n为获取的数据总个数,由此构成一组关键设备监测数据c={c1,c2,...,c
n
};
7.步骤2、将步骤1中得到的监测数据c用emd技术分解成一个残余序列r(t)和两个本征模态函数imf
s
(t);
8.步骤3、对于经过步骤2分解后得到的残余序列,用tcn网络进行预测,得到残余序列的预测结果;
9.步骤4、对于经过步骤2分解后得到的imf
s
(t),用pf算法进行预测,得到imf
s
(t)的预测结果;
10.步骤5、将步骤3和步骤4中得到的预测结果相加融合,从而计算出关键设备的剩余寿命预测结果。
11.本发明的特点还在于,
12.步骤2具体如下:
13.步骤2.1、采用emd技术将步骤1中获取到的关键设备监测数据c分解为2个本征模态函数imf1(t)、imf2(t)和一个残余序列r(t),将imf1(t)、imf2(t)简写为imf
s
(t),其中s=1,2,s为本征模态函数的个数,分解得到的imf
s
(t)是监测数据c的两个频率分量,对应监测数据c的波动过程;残余序列r(t)对应监测数据c的正常退化过程,因此,分解结果描述为
其中imf
s
(t)表示第s个本征模态函数,r(t)为分解后的残余序列,t表示时间;
14.步骤2.2、用步骤2.1中分解后得到的本征模态函数imf
s
(t)和残余序列r(t)分别表征监测数据c的波动过程和正常退化过程,具体如下:当监测数据c处于平稳下降趋势即正常退化过程时,imf
s
(t)的幅值保持不变,当监测数据c出现上升现象即出现波动过程时,imf
s
(t)的幅值也随之上下波动,因此监测数据c的波动过程用本征模态函数imf
s
(t)表征;步骤2.1中分解得到的残余序列r(t)的变化趋势和c正常退化过程的变化趋势相同,且监测数据c呈下降趋势时,r(t)的幅值也不断下降,因此监测数据c的正常退化过程用r(t)表征。
15.步骤3具体如下:
16.步骤3.1、在步骤2分解后得到的残余序列r(t)中设定预测起始点t,其中t∈[1,n]且t取整数,并划分训练集和测试集:将t前的r(t)作为训练集,t后的r(t)作为测试集;
[0017]
步骤3.2、首先建立tcn网络模型并设置模型参数的初始值,设置网络层数为3层,隐层神经元个数为6,tcn网络的最大迭代次数为200次,dropout率为0.5,学习率为3,扩张因果卷积的卷积核大小为7,采用adam作为优化器,采用relu函数作为激活函数,接着将所述步骤3.1得到的训练集中的数据作为tcn网络的输入,训练该网络,得到最优模型参数;
[0018]
步骤3.3、使用所述步骤3.2训练好的tcn网络对所述步骤3.1得到的测试集中的数据进行预测,得到残余序列的预测结果r
pred
。
[0019]
步骤4具体如下:
[0020]
步骤4.1、选择双指数函数c
imf
=a
·
e
b
·
g
c
·
e
d
·
g
作为pf算法中的衰退模型,其中c
imf
表示步骤2中分解后的得到的本征模态函数,a、b、c、d表示模型状态参数,g表示充放电循环次数,用该双指数函数拟合步骤2中分解得到的imf
s
(t),得到模型状态参数a、b、c、d的初始值;
[0021]
步骤4.2、建立状态空间方程,包括状态转移方程和量测方程,其中状态转移方程为:
[0022]
x
k
=(a
k
,b
k
,c
k
,d
k
)
[0023][0024]
量测方程为:
[0025][0026]
其中,x
k
表示系统k时刻下的状态,a
k
、b
k
、c
k
、d
k
表示系统k时刻下的参数值,w表示系统的过程噪声,c
imfk
表示k时刻的本征模态函数值,v
k
表示系统k时刻的量测噪声,过程噪声和量测噪声均符合均值为0方差为σ的高斯分布;
[0027]
步骤4.3、在步骤2分解后得到的本征模态函数imf
s
(t)中设置与步骤3.1中相同的预测起始点t,同样将t前的imf
s
(t)数据作为训练集,t后的imf
s
(t)数据作为测试集,采用pf算法跟踪训练集中的数据,并不断更新模型状态参数a、b、c、d,最终得到最优模型状态参
数;
[0028]
步骤4.4、采用pf算法对测试集中的数据进行预测,得到imf
s
(t)的预测结果
[0029]
步骤4.4具体如下:
[0030]
步骤4.4.1、初始化参数,从系统的先验概率密度分布p(x0)中采样得到粒子集l=1,2,
…
,n其中为0时刻的状态对应的第l个粒子,n为总的粒子个数,每个粒子的权值为1/n;
[0031]
步骤4.4.2、进行重要性采样并更新粒子权值,在k时刻,从系统状态的后验概率密度中采样得到粒子其中表示k时刻的状态对应的第l个粒子,采样后可将粒子的初始权值更新为重要性权值:
[0032][0033]
其中,表示k时刻的第l个粒子权重,z
k
为k时刻的观测值,随后将重要性权值进行归一化得到归一化权值计算状态参数x在k时刻的最小状态估计
[0034]
步骤4.4.3、重采样,判断有效粒子数n
eff
是否小于重采样阈值n
th
,若n
eff
<n
th
,则调用重采样算法,得到新的具有相同权重的粒子集否则直接进入步骤4.4.4进行预测;
[0035]
步骤4.4.4、进行预测,基于系统的状态方程,预测系统在k 1时刻的状态参数得到imf
s
(t)的预测结果
[0036]
步骤5具体如下:
[0037]
步骤5.1、将步骤3得到的预测结果r
pred
和步骤4得到的预测结果相加融合,得到融合预测结果后的监测数据c
pred
,其中设定关键设备失效阈值c
eol
,将c
pred
与c
eol
进行比较,若c
pred
>c
eol
,则继续进行预测,否则停止预测;
[0038]
步骤5.2、根据循环使用寿命与剩余使用寿命的关系,通过公式n
rul
=n
eol
‑
n
ecl
计算得到剩余使用寿命结果,其中n
rul
表示剩余使用寿命值,n
eol
表示监测数据衰退到失效阈值总的循环次数,n
ecl
表示开始预测时的循环次数。
[0039]
本发明的有益效果是,一种基于tcn和粒子滤波的关键设备剩余寿命预测方法,首先用经验模态分解(empirical mode decomposition,emd)技术对关键设备的监测数据进行多尺度分解,分解成多个本征模态函数(intrinsic mode function,imf)和一个残余序列,并建立时间卷积网络(temporal convolutional network,tcn)和粒子滤波(particle filter,pf)算法模型分别对残余序列和本征模态函数进行预测,进而得到监测设备的剩余寿命预测结果。在预测关键设备的剩余寿命时将获取得到的监测数据进行多尺度分解并分别进行建模预测,能够提高预测精度,有效衡量关键设备未来的状态和工作能力。
附图说明
[0040]
图1是本发明一种基于tcn和粒子滤波的关键设备剩余寿命预测方法的总体流程图;
[0041]
图2是本发明一种基于tcn和粒子滤波的关键设备剩余寿命预测方法的关键设备监测数据的变化曲线;
[0042]
图3是本发明一种基于tcn和粒子滤波的关键设备剩余寿命预测方法得到的监测数据的emd分解结果图;
[0043]
图4是本发明一种基于tcn和粒子滤波的关键设备剩余寿命预测方法的监测数据和分解后得到的的残余序列之间的对比图。
具体实施方式
[0044]
下面结合附图和具体实施方式对本发明进行详细说明。
[0045]
本发明一种基于tcn和粒子滤波的关键设备剩余寿命预测方法,流程图如图1所示,具体按照以下步骤实施:
[0046]
步骤1、获取关键设备的监测数据值c
i
,i=1,2,...,n,其中c
i
表示获取的该关键设备的第i个监测数据值,n为获取的数据总个数,由此构成一组关键设备监测数据c={c1,c2,...,c
n
};
[0047]
步骤2、将步骤1中得到的监测数据c用emd技术分解成一个残余序列r(t)和两个本征模态函数imf
s
(t);
[0048]
步骤2具体如下:
[0049]
步骤2.1、步骤1中获取到的关键设备监测数据c总体上具有平稳下降趋势,反映了c的正常退化过程,但在退化过程中,c存在小幅度的上升现象,将这种上升现象看作c的一种波动过程,波动过程的存在会影响预测的精度,因此为了提高预测精度,要将正常退化过程和波动过程分开。采用emd技术将步骤1中获取到的关键设备监测数据c分解为2个本征模态函数imf1(t)、imf2(t)和一个残余序列r(t),将imf1(t)、imf2(t)简写为imf
s
(t),其中s=1,2,s为本征模态函数的个数,分解得到的imf
s
(t)是监测数据c的两个频率分量,对应监测数据c的波动过程;残余序列r(t)对应监测数据c的正常退化过程,因此,分解结果描述为其中imf
s
(t)表示第s个本征模态函数,r(t)为分解后的残余序列,t表示时间;
[0050]
步骤2.2、用步骤2.1中分解后得到的本征模态函数imf
s
(t)和残余序列r(t)分别表征监测数据c的波动过程和正常退化过程,具体如下:所述本征模态函数imf
s
(t)是c的两个频率分量,表达了c在不同频率下的特征,当监测数据c处于平稳下降趋势即正常退化过程时,imf
s
(t)的幅值保持不变,当监测数据c出现上升现象即出现波动过程时,imf
s
(t)的幅值也随之上下波动,因此监测数据c的波动过程用本征模态函数imf
s
(t)表征;步骤2.1中分解得到的残余序列r(t)的变化趋势和c正常退化过程的变化趋势相同,且监测数据c呈下降趋势时,r(t)的幅值也不断下降,因此监测数据c的正常退化过程用r(t)表征。
[0051]
步骤3、对于经过步骤2分解后得到的残余序列,用tcn网络进行预测,得到残余序列的预测结果;
[0052]
步骤3具体如下:
[0053]
步骤3.1、在步骤2分解后得到的残余序列r(t)中设定预测起始点t,其中t∈[1,n]且t取整数,并划分训练集和测试集:将t前的r(t)作为训练集,t后的r(t)作为测试集;
[0054]
步骤3.2、首先建立tcn网络模型并设置模型参数的初始值,设置网络层数为3层,隐层神经元个数为6,tcn网络的最大迭代次数为200次,dropout率为0.5,学习率为3,扩张因果卷积的卷积核大小为7,采用adam作为优化器,采用relu函数作为激活函数,接着将所述步骤3.1得到的训练集中的数据作为tcn网络的输入,训练该网络,得到最优模型参数;
[0055]
步骤3.3、使用所述步骤3.2训练好的tcn网络对所述步骤3.1得到的测试集中的数据进行预测,得到残余序列的预测结果r
pred
。
[0056]
步骤4、对于经过步骤2分解后得到的imf
s
(t),用pf算法进行预测,得到imf
s
(t)的预测结果;
[0057]
步骤4具体如下:
[0058]
步骤4.1、选择双指数函数c
imf
=a
·
e
b
·
g
c
·
e
d
·
g
作为pf算法中的衰退模型,其中c
imf
表示步骤2中分解后的得到的本征模态函数,a、b、c、d表示模型状态参数,g表示充放电循环次数,用该双指数函数拟合步骤2中分解得到的imf
s
(t),得到模型状态参数a、b、c、d的初始值;
[0059]
步骤4.2、建立状态空间方程,包括状态转移方程和量测方程,其中状态转移方程为:
[0060]
x
k
=(a
k
,b
k
,c
k
,d
k
)
[0061][0062]
量测方程为:
[0063][0064]
其中,x
k
表示系统k时刻下的状态,a
k
、b
k
、c
k
、d
k
表示系统k时刻下的参数值,w表示系统的过程噪声,c
imfk
表示k时刻的本征模态函数值,v
k
表示系统k时刻的量测噪声,过程噪声和量测噪声均符合均值为0方差为σ的高斯分布;
[0065]
步骤4.3、在步骤2分解后得到的本征模态函数imf
s
(t)中设置与步骤3.1中相同的预测起始点t,同样将t前的imf
s
(t)数据作为训练集,t后的imf
s
(t)数据作为测试集,采用pf算法跟踪训练集中的数据,并不断更新模型状态参数a、b、c、d,最终得到最优模型状态参数;
[0066]
步骤4.4、采用pf算法对测试集中的数据进行预测,得到imf
s
(t)的预测结果
[0067]
步骤4.4具体如下:
[0068]
步骤4.4.1、初始化参数,从系统的先验概率密度分布p(x0)中采样得到粒子集l=1,2,
…
,n其中为0时刻的状态对应的第l个粒子,n为总的粒子个数,每个粒子的权值为
1/n;
[0069]
步骤4.4.2、进行重要性采样并更新粒子权值,在k时刻,从系统状态的后验概率密度中采样得到粒子其中表示k时刻的状态对应的第l个粒子,采样后可将粒子的初始权值更新为重要性权值:
[0070][0071]
其中,表示k时刻的第l个粒子权重,z
k
为k时刻的观测值,随后将重要性权值进行归一化得到归一化权值计算状态参数x在k时刻的最小状态估计
[0072]
步骤4.4.3、重采样,判断有效粒子数n
eff
是否小于重采样阈值n
th
,一般n
th
=2n/3,若n
eff
<n
th
,则调用重采样算法,得到新的具有相同权重的粒子集否则直接进入步骤4.4.4进行预测;
[0073]
步骤4.4.4、进行预测,基于系统的状态方程,预测系统在k 1时刻的状态参数得到imf
s
(t)的预测结果
[0074]
步骤5、将步骤3和步骤4中得到的预测结果相加融合,从而计算出关键设备的剩余寿命预测结果。
[0075]
步骤5具体如下:
[0076]
步骤5.1、将步骤3得到的预测结果r
pred
和步骤4得到的预测结果相加融合,得到融合预测结果后的监测数据c
pred
,其中设定关键设备失效阈值c
eol
,并将关键设备失效阈值c
eol
设定为1.4ah,将c
pred
与c
eol
进行比较,若c
pred
>c
eol
,则继续进行预测,否则停止预测;
[0077]
步骤5.2、根据循环使用寿命与剩余使用寿命的关系,通过公式n
rul
=n
eol
‑
n
ecl
计算得到剩余使用寿命结果,其中n
rul
表示剩余使用寿命值,n
eol
表示监测数据衰退到失效阈值总的循环次数,n
ecl
表示开始预测时的循环次数。
[0078]
图2给出了关键设备的监测数据随监测次数的变化趋势图,由图可知该关键设备前期退化速率较慢,后期退化速率变快,而且监测数据在某些时刻有小幅回升现象,即自恢复现象,每段自恢复的程度和时间也存在差异;图3给出了采用emd技术对关键设备监测数据进行多尺度分解后的图,即将关键设备监测数据分解为多个具有不同频率的分量,图中residual value部分是分解得到的剩余信号,即整体趋势部分,显示了关键设备的正常退化过程,imf1、imf2为自恢复引起的波动部分,从图中可以看出,residual value部分与图2中的监测数据的数据范围相同,均分布在0~2之间,imf1分布在
‑
0.05~0.05之间,imf2分布在
‑
0.02~0.02之间,说明分解出的数据均在不同的数据尺度下;图4给出了图2中的监测数据变化趋势图与图3中的的residual value部分的对比图,由图可知residual value部分不仅与图2的监测数据的数据范围相同,且整体退化趋势相同都是单调下降的,能很好地反映监测数据的正常退化趋势。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。