1.本实用新型属于教学设备领域,特别涉及一种远程控制的三轴运动实验系统。
背景技术:
2.疫情时段或其他学生因故无法到校时,学生无法操作仪器无法感受设备的运动,理论授课教学容易和实际实验教学脱节,学校受限于当前的实验设备条件限制,无法让学生在家里就能完成理论课程配套的教学实验。所以改造现有的常用的实验设备,以适应特殊时期的授课需求。
技术实现要素:
3.本实用新型的目的在于提供一种远程控制的三轴运动实验系统,集成运动机构、遥控机构和监控机构,方便学生熟悉、操作设备。
4.为实现上述目的,本实用新型提供了一种远程控制的三轴运动实验系统,机架,作为支撑平台,所述机架的上侧中间位置设置有三轴传动机构,所述机架的上侧边缘位置设置有第一竖板,所述机架的下侧作为储存空间,所述机架的正面敞开,所述机架的边缘位置设置撑杆以及位于所述撑杆上的摄像头,所述摄像头朝向所述三轴传动机构实时获取画面,所述三轴传动机构包括安装板、xyz三个方向上运动的三条导轨、三个滑块以及三个电机,所述三轴传动机构最终输出运动的输出端设置夹具;电机控制模块,所述电机控制模块设置在所述第一竖板的背面,所述电机控制模块包括plc单元和信号驱动单元,所述plc单元和所述信号驱动单元采用模块化分离设计,所述信号驱动单元可适配不同类型的所述plc单元,所述plc单元用于接收用户输入的控制程序,控制三个所述电机工作;指令控制模块,所述指令控制模块设置在所述机架之内,所述指令控制模块连接所述控制模块和所述摄像头,实时接收、传输数据,以通过网络完成教学实验。
5.作为上述方案的改进,所述三轴传动机构的x方向上包括分别位于安装板左右两侧的第一滑块,两个所述第一滑块的底部通过第一连杆彼此连接,所述机架的上侧设置一对导轨和一条丝杆,两条导轨和一条丝杆均穿过第一连杆,丝杆的一端铰接机架,丝杆的另一端连接第一电机,两个所述第一滑块之间设置用于保护的背板、第二滑块、一对导轨和一条丝杆,所述第一滑块上设置第二电机,两条导轨和一条丝杆均穿过第二滑块,丝杆的一端铰接第一滑块,丝杆的另一端铰接第二电机,所述第二滑块上设置第三滑块、第三电机、一对导轨和一条丝杆,两条导轨和一条丝杆均穿过第三滑块,丝杆的一端铰接第二滑块,丝杆的另一端铰接第三电机。
6.作为上述方案的改进,所述夹具上可拆卸地设置有画笔、激光笔或距离传感器。
7.作为上述方案的改进,当夹具上安装距离传感器时,控制模块连接距离传感器并且还用于创建扫描到的三维虚拟模型,并且通过网络将数据传递到学生的电脑。
8.作为上述方案的改进,所述电机控制模块包括若干个接线板、保护罩、控制板、断路器、电源和总线单元,所述三轴传动机构的导线从第一滑块的侧面绕到所述第一竖板的
背面然后连接所述总线单元,所述总线单元为db50转接板。
9.作为上述方案的改进,所述指令控制模块包括第二竖板、设置在所述第二竖板上的无线收发器、置在所述第二竖板上的以太网单元和总线单元,所述无线收发器和所述以太网均连接到总线单元,所述总线单元为db50转接板,所述电机控制模块和所述指令控制模块通过总线单元彼此连接。
10.作为上述方案的改进,所述机架的上下两侧设有开口彼此相对的u形槽,所述第二竖板的上下侧从侧面插入两个u形槽之间实现第二竖板的可拆卸连接。
11.本实用新型具有如下有益效果:
12.机架对外敞开了电机控制模块、指令控制模块的接线端,方便老师设置不同的操作逻辑、布置不同的实验任务、方便调节调校参数,适应不同的驱动设备;电机控制模块和指令控制模块之间使用db50转接板连接,电机控制模块和指令控制模块分别包含各种各样的单元,彼此之间不方便直接通讯反而需要中转,采用模块化设计方便更换模拟对象,比如更换电机控制模块或指令控制模块,产生更好地教学效果。
13.撑杆的设计便于将摄像头布置在高处,第一竖板的设计同时将各种导线藏于背后、不遮挡摄像头的视野,系统通过摄像头和网络能实时反馈操作,实现了以往网络课堂无法完成实验环节教学,让学生通过网络也能完成“学中做,做中学”的理论一体化教学。
14.三轴协同运动可以绘制出更加形象的图形,以及模拟更多的机床加工过程,显著提高教学质量。
附图说明
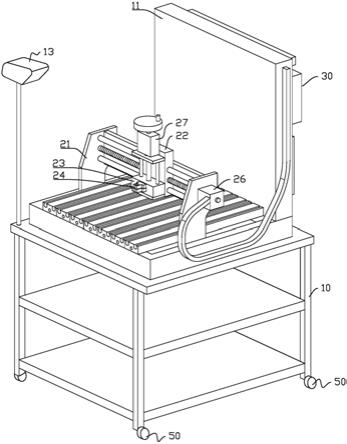
15.图1是一种实施例下系统的正面立体图;
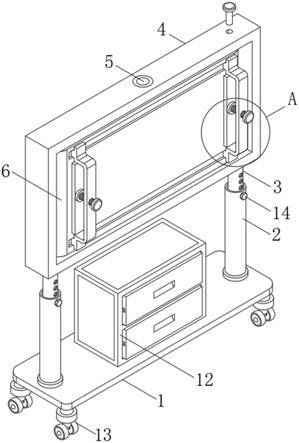
16.图2是一种实施例下系统的背面立体图;
17.图3是一种实施例下控制面板及其部件安装在机架上的剖面图。
18.附图标记说明:10、机架;11、第一竖板;12、第二竖板;13、摄像头;14、无线收发器;21、第一滑块;22、第二滑块;23、第三滑块;24、夹具;25、第一电机;26、第二电机;27、第三电机;30、电机控制模块;40、指令控制模块;50、车轮。
具体实施方式
19.下面结合附图,对本实用新型的具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
20.参照图1至图3,本实用新型公开了一种远程控制的三轴运动实验系统,创新点在于优化机架10、三轴传动机构和指令控制模块40。
21.机架10作为支撑平台,所述机架10的上侧中间位置设置有三轴传动机构,所述机架10的上侧边缘位置可拆卸地设置有第一竖板11,所述机架10的下侧作为储存空间,所述机架10的正面敞开,所述机架10的边缘设置撑杆以及位于所述撑杆顶部的摄像头13,所述摄像头13朝向所述三轴传动机构实时获取画面。
22.电机控制模块30设置在所述第一竖板11的背面,可随着第一竖板11的拆卸整体脱离机架10。所述电机控制模块30包括plc单元和信号驱动单元,所述plc单元和所述信号驱动单元采用模块化分离设计,所述信号驱动单元可适配不同类型的所述plc单元,所述plc
单元用于接收用户输入的控制程序,控制电机工作。指令控制模块40设置在所述机架10的正面,所述指令控制模块40连接所述电机控制模块30和所述摄像头13,实时接收、传输数据,以通过网络完成教学实验。电机控制模块30包括各种各样的单元(比如伺服驱动模块、变频器、步进驱动模块,配套的电机分别为伺服电机、三相交流电机、步进电机及其编码器等),由于不同模块的内部接线插口不统一,为了模块化设计,电机控制模块30设置总线单元,并通过一端汇集内部各个单元的接线,另一端预留用于连接其他总线单元。作为优选,所述总线单元为db50转接板。
23.所述指令控制模块40包括第二竖板12、设置在所述第二竖板12上的无线收发器14、置在所述第二竖板12上的以太网单元和总线单元,所述无线收发器14和所述以太网均连接到总线单元,所述总线单元为db50转接板,所述电机控制模块30和所述指令控制模块40通过总线单元彼此连接。
24.所述三轴传动机构包括安装板、xyz三个方向上运动的三条导轨、三个滑块以及三个电机,x方向为图1中的左下右上方向,y方向为图1中的左上右下方向,z方向为图1中的垂直方向,所述三轴传动机构最终输出运动的输出端设置夹具24。所述夹具24上可拆卸地设置有画笔、激光笔或距离传感器。在一种实施例中,夹具24夹持画笔,学生远程操作夹具24在纸上移动,模拟训练激光切割定位和裁切工艺。在另一种实施例中,当夹具24上安装距离传感器时,电机控制模块30连接距离传感器并且还用于创建扫描到的三维虚拟模型,并且通过无线收发器14或以太网将数据传递到学生的电脑,模拟训练采样率和建模精细程度的对应关系。
25.作为优选,作为上述方案的改进,所述三轴传动机构的x方向上包括分别位于安装板左右两侧的第一滑块21,第一滑块21为片体,两个所述第一滑块21的底部通过第一连杆彼此连接,所述机架10的上侧设置一对导轨和一条丝杆,两条导轨和一条丝杆均穿过第一连杆,丝杆的一端铰接机架10,丝杆的另一端连接第一电机25;如图1所示,两个第一滑块21承载较重的力,可以轻易地保持受力平衡。两个所述第一滑块21之间设置用于保护的背板(在其他实施例中也可以取消背板)、第二滑块22、一对导轨和一条丝杆,第二滑块22为块体,所述第一滑块21上设置第二电机26,两条导轨和一条丝杆均穿过第二滑块22,丝杆的一端铰接第一滑块21,丝杆的另一端铰接第二电机26。所述第二滑块22上设置第三滑块23、第三电机27、一对导轨和一条丝杆,第三滑块23为块体,两条导轨和一条丝杆均穿过第三滑块23,丝杆的一端铰接第二滑块22,丝杆的另一端铰接第三电机27。
26.机架10的上表面为工作平台,工作平台具有多个平行布置的沟槽用于可拆卸地设置夹具。通过夹具固定需要雕刻的金属板、带有刻度的金属背板等各种工具。
27.本实施例中,主要考察学生在xy平面操作的能力,z方向上的第三电机27基本保持锁定状态。作为优选,每一个电机均配置有手轮,方便手动旋转丝杆。
28.所述电机控制模块30的总线、所述指令控制模块40的总线和所述三轴传动机构的总线均采用db50转接板连接,本方案采用统一的接口,替换模块简单便捷。本实施例中,安装轨道除了接线板,还可以安装其他元器件。
29.作为优选,所述机架10安装指令控制模块40的位置敞开。如图3所示,机架10的右边的上下两侧设有u形槽,第二竖板12沿垂直于纸面方向插入两个u形槽之间,如此实现可拆卸连接。
30.机架10对外敞开了电机控制模块30和指令控制模块40,方便老师设置不同的操作逻辑、布置不同的实验任务、方便调节调校参数,使得设备能产生更好地教学效果。第一竖板11的设计便于将各种导线藏于背后、不遮挡摄像头13的视野,系统通过摄像头13和指令控制模块40能实时反馈操作,学生在家也不会落下实践教学,学生远程体验操作设备的手感。
31.作为优选,机架10的下方设置数量合适的车轮50。
32.前述对本实用新型的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本实用新型限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本实用新型的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本实用新型的各种不同的示例性实施方案以及各种不同的选择和改变。本实用新型的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。