1.本发明涉及的是一种智能交通管理领域的技术,具体是一种面向智能网联车辆的分布式信息可信度的识别和处理方法。
背景技术:
2.在智能交通系统中,分布式控制系统是解决大规模优化问题的强有力且有效的方法,但当虚假信息入侵系统时,尤其是通过车间通信的方式入侵,错误的信息将导致智能车辆做出错误的决策,导致不必要的损失。现有技术通过预测模型计算信息可信度,但预测模型的准确性寄托于样本的真实性,一旦原始数据存在漏洞,无论现有技术的算法多么精准,得到的计算值仍是错误的,即现有技术无法解决存在虚假信息情况下的安全评价。
技术实现要素:
3.本发明针对现有技术面向智能网联车辆端辅助分布式信息的可信度问题,提出一种面向智能网联车辆的分布式信息可信度的识别和处理方法,通过面向智能网联车辆的分布式信息可信度的识别和处理以及远程可疑信息可信度判断流程及机制,即辅助于其他v2v数据来判断。
4.本发明是通过以下技术方案实现的:
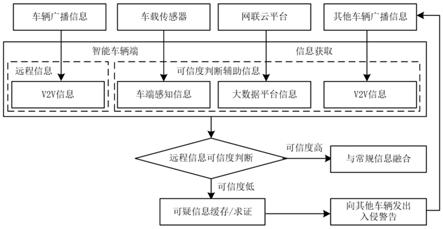
5.本发明涉及一种面向智能网联车辆的分布式信息可信度的识别和处理方法,在信息获取阶段,分别通过本车传感器获取车端感知信息、通过网联云平台和其他车辆广播信息获取大数据平台信息和v2v信息作为可信度判断的辅助信息;在远程信息可信度判断阶段,通过辅助信息计算待确定远程车辆信息的可信度指标,并在可信度可接受时进行信息融合,否则不进行信息融合并对待确定远程车辆信息进行额外缓存的同时,向其他车辆广播入侵信号以及信息真实性求证信号,并等待其他车辆的反馈结果以协同判断信息的真实性。
6.所述的本车传感器包括但不限于:视觉传感器、激光雷达传感器、毫米波传感器、车载定位系统等可获取本车运动姿态的多种传感器。
7.所述的车端感知信息包括:经度纬度高度信息、速度及加速度信息、行驶意图信息。
8.所述的大数据平台信息包括:所有车辆的车端感知信息、所有道路的监控信息以及所有路侧信息。
9.所述的v2v信息包括:其他车辆广播给本车的感知信息,包括:其他车辆的车端感知信息以及其周围车辆状态信息。
10.所述的待确定远程车辆信息是指:待识别的v2v信息。
11.所述的可信度指标,即待识别的其他车辆广播信息的真伪性,具体通过得到,其中:φ为网联云平台的原始信息集,θ为待确定远程车辆信息的信息集,为空集标识,当空集为真,则表示不可信,可信度指标为0,否则为1。
12.所述的信息融合是指:将待确定远程车辆信息与本车在进行远程信息交互操作前已存储的状态信息进行拼接,即拼接成本车算法可识别的矩阵形式。
13.所述的额外缓存是指:将待确定远程车辆信息存储于额外的缓存设备以便下一周期的识别操作。
14.所述的协同判断是指:向已确定的其他的真实车辆发出确认信息,当其他车辆的车载传感器感知到发出此待确定车辆信息的车辆(即其他车辆发现该车的存在),则判定此待确定信息为真实,然后于原有数据进行融合;否则判定此待确定信息为虚假,上报警告信息。
15.所述的已确定是指:以收到待确定远程车辆信息之前的所有其他车辆的信息均为真实,当道路上仅有本车,即一辆车时,所有加入的新车均为待确定信息。技术效果
16.本发明整体解决了现有技术的无法及时鉴别虚假信息带来的车辆决策错误的缺陷;本发明在原始数据获取阶段,建立识别和处理机制,从原始数据获取的层面,对信息的真实性进行识别和处理,从根源上弥补了信息安全的漏洞,为所有的需要利用原始数据的算法奠定信息安全基础。
附图说明
17.图1为远程决策信息可信度判断流程示意图;
18.图2为实施例可疑信息源远程求助阶段流程示意图;
19.图3为实施例信息真实度识别图;
20.图中:v1
‑
v4分别代表车辆1
‑
车辆4。
具体实施方式
21.如图1所示,为本实施例涉及一种面向智能网联车辆的分布式信息可信度的识别和处理方法,在信息获取阶段,分别通过本车传感器获取车端感知信息、通过网联云平台和其他车辆广播信息获取大数据平台信息和v2v信息作为可信度判断的辅助信息;在远程信息可信度判断阶段,通过辅助信息计算远程车辆信息的可信度指标,并在可信度可接受时将远程车辆信息与常规信息融合,否则对远程车辆信息进行额外缓存并不将其与常规信息融合,同时向其他车辆发出入侵信号以及信息真实性求证信号,并等待其他车辆的反馈结果以协同判断此信息的真实性。
22.通过部署4辆车于无信号灯交叉口环境下进行具体实验,设置实验参数为:
23.当道路上有4辆正常行驶的车辆,该4辆车信息真实性已被确定。
24.车辆1:距交叉口90m,车速15m/s,南北向通行;
25.车辆2:距交叉口100m,车速15m/s,东西向通行;
26.车辆3:距交叉口90m,车速13m/s,南北向通行;
27.车辆4:距交叉口90m,车速13m/s,西东向通行;
28.车辆5(广播额外待确认信息):距交叉口120m,车速15m/s,西东向通行。
29.所有车辆基于上述方法进行分布式信息可信度的识别和处理,具体为:当车辆1发现存在可能的虚拟伪信息时,向周围其他车辆求证并发出警告信息,其他车辆收到求证和
警告信息后,辨识该信息的可信度。利用额外的车辆5通过v2v广播可能的伪信息,验证该算法的性能。
30.如图3所示,周围车辆,如车辆2、3、4辅助车辆1识别该信息。车辆2、3无法通过车载传感器感知此车车辆的存在,因此,可信度将为0;车辆4能通过车端传感器感知到发布该信息的车辆的存在,因此,可信度为1。最后,通过辅助信息对比,判断其可信度为1。该技术能快速有效的利用辅助信息识别伪信息,将识别结果通过v2v反馈给其他车辆。
31.与现有技术相比,本方法使得智能汽车在分布式智能交通领域的原始数据的安全性得到保证,弥补了远程获取信息的安全漏洞,是所有智能车辆决策算法的基础。
32.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
技术特征:
1.一种面向智能网联车辆的分布式信息可信度的识别和处理方法,其特征在于,在信息获取阶段,分别通过本车传感器获取车端感知信息、通过网联云平台和其他车辆广播信息获取大数据平台信息和v2v信息作为可信度判断的辅助信息;在远程信息可信度判断阶段,通过辅助信息计算待确定远程车辆信息的可信度指标,并在可信度可接受时进行信息融合,否则不进行信息融合并对待确定远程车辆信息进行额外缓存的同时,向其他车辆广播入侵信号以及信息真实性求证信号,并等待其他车辆的反馈结果以协同判断信息的真实性;所述的本车传感器包括:视觉传感器、激光雷达传感器、毫米波传感器、车载定位系统;所述的车端感知信息包括:经度纬度高度信息、速度及加速度信息、行驶意图信息;所述的大数据平台信息包括:所有车辆的车端感知信息、所有道路的监控信息以及所有路侧信息;所述的v2v信息包括:其他车辆广播给本车的感知信息,包括:其他车辆的车端感知信息以及其周围车辆状态信息;所述的待确定远程车辆信息是指:待识别的v2v信息。2.根据权利要求1所述的面向智能网联车辆的分布式信息可信度的识别和处理方法,其特征是,所述的可信度指标,即待识别的其他车辆广播信息的真伪性,具体通过得到,其中:φ为网联云平台的原始信息集,θ为待确定远程车辆信息的信息集,为空集标识,当空集为真,则表示不可信,可信度指标为0,否则为1。3.根据权利要求1所述的面向智能网联车辆的分布式信息可信度的识别和处理方法,其特征是,所述的信息融合是指:将待确定远程车辆信息与本车在进行远程信息交互操作前已存储的状态信息进行拼接,即拼接成本车算法可识别的矩阵形式。4.根据权利要求1所述的面向智能网联车辆的分布式信息可信度的识别和处理方法,其特征是,所述的额外缓存是指:将待确定远程车辆信息存储于额外的缓存设备以便下一周期的识别操作。
技术总结
一种面向智能网联车辆的分布式信息可信度的识别和处理方法,在信息获取阶段,分别通过本车传感器获取车端感知信息、通过网联云平台和其他车辆广播信息获取大数据平台信息和V2V信息作为可信度判断的辅助信息;在远程信息可信度判断阶段,通过辅助信息计算待确定远程车辆信息的可信度指标,并在可信度可接受时进行信息融合,否则不进行信息融合并对待确定远程车辆信息进行额外缓存的同时,向其他车辆广播入侵信号以及信息真实性求证信号,并等待其他车辆的反馈结果以协同判断信息的真实性。本发明通过面向智能网联车辆的分布式信息可信度的识别和处理以及远程可疑信息可信度判断流程及机制,即辅助于其他V2V数据来判断。即辅助于其他V2V数据来判断。即辅助于其他V2V数据来判断。
技术研发人员:王亚飞 王凯正 周志松 刘旭磊 殷承良
受保护的技术使用者:上海交通大学
技术研发日:2021.08.19
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。