1.本发明涉及无人机领域,特别涉及一种模块化协同作业无人机。
背景技术:
2.未来的无人飞机(以下简称无人机)使用环境,相比过去具有更高的智能,更快的节奏,更多的变数。通常,为了使无人机适应性能与作业灵活性及任务弹性拓展,传统研发方式是分别研发具有优化的多种构型无人机,而需要投入大量的时间和努力,并且在指定特定形状之后,改变形状受到相当大的限制。目前有为了实现运行方面的便利性和移动性而研发的无人飞行器,达到小型化或以可拆装特定设备的方式实现了模块化,但是,现有方式大多属于以提高移动性或操作性为目的,存在无法改变飞行器的整体形状的问题。在未来无人机使用中,对无人机的性能与作业灵活性,任务弹性与维护性有着越来越严格的要求,为了适应无人机作业的发展趋势,一种模块化,可以实现快速拆分与组装的无人机尤为重要。
技术实现要素:
3.本发明为了解决上述技术问题,提供一种模块化协同作业无人机,可以实现快速拆分与组装实现不同作业任务功能,形成不同作业平台与体系的无人作业飞机。
4.具体技术方案如下:
5.本发明的一种模块化协同作业无人机,包括
6.核心机体模块,其用于容纳各型飞机所需要的动力单元(含燃料)、基本的载荷(武器)舱及基础航电单元;
7.机头模块,其包括基本的对空/对地火控系统用于执行无人机最基本的任务
‑
攻击目标,其内部还可以安装不同电子设备用于不同用途,电子干扰模块,预警模块,用于执行不同任务;
8.机翼模块包括标准机翼模块、大型机翼模块和高空翼型模块中的一个模块或多个模块的组合,
9.标准机翼模块,其翼展最短,后掠角最大,适合用于无人机高速飞行,用于无人机的标准型与截击型,满足高空高速性能的需求。用于执行“优势争夺,穿透制空,发现即摧毁”等任务,做到“唯快不破”;
10.大型机翼模块,相对于前者翼展,翼面积更大。这样可以在机翼内容纳更多燃油用于提升机体航程与作业半径,从而扩大无人机的打击范围。机翼面积的增大,虽然以牺牲部分高速性能为代价,但同时也可以携带更多武器,包括外挂式隐身修型的武器荚仓,大型杀伤武器等用于高效打击高价值目标,取得作业场主动权。用于无人机的拓展型。
11.高空翼型模块,其翼展进一步延长并在外端有高空临界翼修型,飞机可以在非常高的空域以相当低的速度以发动机功率飞行,降低巡航油耗的同时也可以在目标上空长时间停留从而搜集详细情报,为整体作业场态势感知提供有利参考;用于无人机的高空侦察
型。
12.尾翼模块,包括下反尾翼模块、上反尾翼模块中的一个模块或多个模块的组合,
13.下反尾翼模块,主要和高空翼型模块(侦察型)搭配使用,形成“倒v型尾翼”,由于主翼为了满足高空飞行采用了上反设计,下反尾翼可以有利于改善操纵性,尤其是翼面涡流效应与发动机气流之间关系的协调以改善操作;
14.上反尾翼模块,用于和其他型机翼模块搭配,被称为v型尾翼或者蝴蝶形尾翼,具有较大的外倾角,使之可以同时充当水平尾翼和垂直尾翼的作用。与传统的三或四片式相比由于减少到了两个,尾翼的总面积减小,一方面降低了后体的重量和阻力,也减少了雷达反射面积从而提高飞机的隐身性能。此外这一设计也可以改善飞机的操作性;
15.前述所有模块均设有对接端口,其对接端口均设置有对接榫卯和电磁铁用于连接其他模块,维持无人机整体结构;
16.所述核心机体模块、所述机头模块、所述机翼模块和所述尾翼模块能够彼此拆卸并且能够彼此机械地固定,从而能够重构成多种构型的无人机。
17.进一步地,还包括子无人机模块,采用乘波体设计,在具有较强的高超音速性能的同时也具备较好的隐身性能,从而可以实现深入打击等高难度任务,主要有两种安装方式,一种是和折叠状态下的大型机翼模块进行对接形成特种作业用机翼模块,机翼折叠后从折叠端口伸出万向轴,折叠后的断面就是端口,万向轴可以旋转,特种作业用机翼模块(合体后的子机)可以充当额外的“操作面”使飞机可以进行一些非常规机动,或者在起降时缩短距离以适应野无人机场或者是被破坏的机场,强化无人机在极端环境下的特种作业能力,用于无人机的特种作业型;子无人机模块上也有一个发射口,用与携带大量的微型“蜂群”无人机,可以携带各种小型非致命武器或者小型致命武器用于斩首行动等对精度要求非常高的任务;另一种是和标准型无人机(装有标准型机翼的主体)结合,采用一上一下的安装方式,特种作业用机翼模块(合体时)充当无人机的附加助推器。
18.进一步地,核心机体模块还包括可收纳小翼面,所述可收纳小翼面包括鸭翼、背鳍,利用鸭翼与鳍的配合可保证飞机在各速度区间均具备出色的机动性能,同时在高超声速的飞行状态下,收纳鸭翼、鳍可大幅减小阻力,激发高速性能。
19.另外,搭配可收缩鸭翼,并让发动机进气口两侧坡度变小,让机体具有一定的翼身融合特征。同时拉长机身、缩小翼展,使机身呈狭长姿态。
20.进一步地,对接榫卯的连接构件结构为方材丁字形接合,机翼、尾翼部分主要承受向上升力,连接构件主要承受切向方向的剪力作用以及向上的弯矩作用;方材丁字形结合榫部分下侧尺寸较大,承受较强的向上弯矩,在传统结构的基础上将进一步加宽结构,增大横截面积来抵抗较强的剪力作用;同时在榫部横向钻孔,配合机体连接口处销钉限制机翼轴向位移。同时为充分保证安全,在接口安装应力传感器和测距传感器,时刻检测接口处风险等级。子无人机等灵活部件的接口采用电磁铁接口与机械接口两种方式共同作用,电磁接口用于空中快速准确对接,机械接口用于完全对接后固定连接提升强度。
21.进一步地,还包括吊舱,设有对接端口,其对接端口均设置有对接榫卯和电磁铁用于连接其他模块;吊舱主要有电子战吊舱,预警吊舱,侦查吊舱和武器吊舱,电子战吊舱内部含有干扰设备用于破坏对方雷达等系统使对方失去主动进攻能力,预警吊舱主要含有预警雷达元件用于进行作业场态势感知,侦查吊舱含有照相机,武器吊舱采用中空设计,内部
可以容纳武器,设有舱门可以打开关闭,打开可以释放武器,关闭保证隐身和减小阻力;所有吊舱外部都进行外观和涂层隐身处理。
22.进一步地,具体地,
23.由于机头模块中的设备可以更换,有一些其他的组合方式,现有以客机或运输机为基础设计的预警机,由于目标较大,速度较慢,通过机头模块中携带的不同部件并进行无线连接,安装上大型机翼模块的飞机将翼尖折叠进行对接,多架飞机的对接使得这些飞机机头模块中的电子设备形成连线,从而能够执行大型飞机可以执行的任务,在遇到危险时自动分体重新切换到灵活的无人机机构型进行自卫反击。
24.进一步地,还包括大型机翼模块和子无人机模块组合而成特种作业用机翼模块,大型机翼模块机翼的外端机翼翼尖处具有折叠关节,一方面可以收折减少停放空间,另一方面,机翼折叠后端口处露出对接口,带有卡榫和电磁铁,根部有转轴,与子无人机模块上对接口连接,结合电磁连接将子无人机模块进行牢固对接,用于执行特种作业任务。
25.进一步地,所述无人机布局设计包括
26.尾翼设置:双蝶形尾翼,位于机身后侧,为保证四波瓣雷达反射特性,蝶型尾翼前后缘在水平面内的投影分别与机翼前后缘平行;采用尾翼外倾62.7~63.3
°
(最优选63
°
)的激进设计,确保雷达波不会返回接收机;出于大迎角机动性的要求,其尾翼采用宽间距布置,避开边条和机翼内部涡流,改善了剧烈机动下的俯仰、滚转和偏航控制;
27.主翼设置:主翼形状分为三种,分别为标准型机翼模块的标准型机翼、大型机翼模块的拓展型机翼、高空型机翼模块的高空型机翼,
28.标准型机翼前缘后掠角59.7~60.3
°
(最优选60
°
),后缘内段后掠角42.7~43.3
°
(最优选43
°
),后缘外段前掠角26.7~27.3
°
(最优选27
°
),安装位置为中单翼,安装角度为下反4.7~5.3
°
(最优选5
°
)。
29.拓展型机翼前缘后掠角47.7~48.3
°
(最优选48
°
),后缘内段后掠角28.7~29.3
°
(最优选29
°
),后缘外段前掠角30.7~31.3
°
(最优选31
°
),安装位置为中单翼,安装角度为下反4.7~5.3
°
(最优选5
°
)。
30.高空型机翼前缘后掠角47.7~48.3
°
(最优选48
°
),安装位置为中单翼,安装角度为上反4.7~5.3
°
(最优选5
°
)。
31.主操纵面设置:位于所有类型机翼后缘的气动操纵面,内侧为襟翼,外侧为副翼,内外侧操纵面均有参与增升和滚转控制,可以定位为
‑
多用途襟副翼;多用途体现在两副操纵面除了传统副翼和襟翼的功能外,还兼有减速板和阻力方向舵的作用,当内侧襟副翼同时下偏,外侧襟副翼同时上偏,在保证机翼不产生额外升力增量的同时,产生对称气动阻力,起到减速板的作用;当只有一侧襟副翼采用上/下偏时,则产生不对称阻力,起到阻力方向舵的作用;
32.进气道、发动机设置与布局:进气道设置在两侧肋部,发动机为两侧双发动机;
33.起落架形式与设置:前三点起落架布局,前起落架设置机头下侧,后起落架设置机身下侧。
34.进一步地,所述无人机气动外形合理借鉴当前主流五代机并增加长细比进一步降低阻力,未来搭配国产新型变循环发动机,可在一定速度下启用冲压发动机以达到高超声速的目标,同时可具备高低空高超声速能力;为适应最大飞行马赫数2.5~2.7(最优选2.6)
级别和以马赫数1.8~2.1(最优选2.0)巡航的性能指标,选用两台带加力适应性ace变循环发动机或者涡轮风扇发动机或者冲压喷气发动机中的一种与飞行状态相匹配;发动机选择为动力上未开燃烧室11.2
‑
11.7t,开燃烧室14.5
‑
15t;
35.核心机体模块干净构型选用了前缘59.7~60.3
°
(最优选60
°
)后掠,尾缘内段42.7~43.3
°
(最优选43
°
)后掠,外段26.7~27.3
°
(最优选27
°
)前掠的主翼,采用自动变弯技术,能根据当前的飞行状态匹配最合适的翼型,从而达到最大化升阻比、改善航向稳定性和减小抖振的作用;在辅助操纵面方面采用可收纳的近距耦合鸭翼和背鳍,具备二维矢量推力喷口;主翼操纵面选用内侧襟副翼 外侧副翼,可联动和全动的布置,以兼顾起降性能和滚转性能;同时鸭翼的差动也有利于进一步提高横向操纵力矩,因而在18~22
°
(最优选20
°
)的攻角下,能保有高达517~523
°
/s(最优选520
°
/s)的横滚速率,同时需要的所用攻角较小,能很快拉到转弯过载;所述无人机(该机)使用非常靠后的蝶形尾翼,与四尾常规相比,蝶形尾的气动表面浸润面积更小,减少了摩擦阻力;减少一对尾翼消灭了一部分干扰阻力;后机身横截面积分布更容易逼近面积律理想值,有利于降低波阻。
36.进一步地,为提高无人机的隐身性能,所述无人机的两台发动机对称安置在机身肋部,进气道采用双斜切乘波进气道,caret进气口不光在水平和垂直方向同时向后斜切,而且将矩形的进气道截面扭转成斜菱形的,避免了侧面的直立平面;caret进气口在水平方向向后斜切则避免了唇部和前进方向成直角;保证了无人机的隐身性能;
37.发动机采用ace适应性变循环发动机,外涵道包括在中涵道之外,但和传统涡扇发动机外涵道后缘开放,直接和核心发动机喷流混合的做法不同,ace的外涵道后端封闭,但发动机和中涵道的喷流,汇入内层喷管,从内测向外和核心发动机的喷流混合;如前所述,内层喷管的外壁是可调的,用于内层喷管的收敛
‑
扩张控制;温度较低的外涵道排气反而从内层喷管排出,这使得温度较高的核心发动机排气呈环形,不仅和较冷的环境空气混合,还和内层喷管的较冷空气混合,有助于迅速降低喷气温度,改善红外隐身性能;
38.所述无人机的叶片形支柱安装在内涵道与外涵道之间,围绕中心环形阵列排布,采用导热性较好的耐高温金属材料制成起到热交换作用,实际上相当于热交换器,外涵道冷空气穿越核心发动机喷流时,已经带走一部分热量,降低排气温度;最后,中心尾椎和内层喷管有效地遮挡了涡轮,使得发动机的后向雷达隐身大有改善。
39.本发明的模块化协同作业无人机具有以下优点:
40.1、本发明的模块化协同作业无人机采用了可模块化组装的整体结构,并以此为基础构建了一套快速反应、灵活组合以及智能化协同的多层次作业体系。本项目依靠模块化单元,将飞机分为核心机身、机翼、尾翼、吊舱等部件,在核心机身的基础上搭配不同模块,可灵活组装包括基础型、拓展型、高空侦查型、截机型和特种作业型在内的多种机型,提高作业准备灵活性,降低成本;
41.具体将飞机各作业单元(机翼、尾翼、机头、吊舱等)模块化,作为单独的集成件使用。可以做到各类型飞行器的灵活组装,形成不同作业部门。同时也极大程度上减少开支,在作业任务不密集的情况下,可只保留少量核心部分(内置弹舱、发动机、基础航电等),储存一定数量的备用单元件以组装形成不同作业力。模块化的设计同时可以解决一部分地区(岛礁,山地等)难以建造大型机库的问题,在需要不同机型执行任务例如岛礁执行反潜、制空、侦察等,可以在不具备充足飞机情况下利用有限空间组装各类型飞机。此外,对于战时
状况,对于发生部分损坏例如机翼受损情况,可以单独更换功能组件,快速重新形成作业能力;更换功能模块的方式在一定程度上减少了开支成本以及修理时间。
42.2、无人机在所有模块均设有对接端口,其对接端口均设置有对接榫卯和电磁铁用于连接其他模块,维持无人机整体结构;保证了所有模块与其它相关模块组合后具备足够的结构强度,能够在飞行中承受足够的过载与其他外力。保证在进行与现有飞机类似的常规机动与紧急情况下应急机动时不会出现解体。
43.3、在满足具备足够的结构强度要求的情况下,模块连接处满足可以方便组装拆卸的要求,能够在作业场上经过简单操作完成快速模块更换。机身由各部分连接件组成,如核心机身、机翼、机头、尾翼等,机体各部分可采用工业集成化制造,缩短制造成本。可灵活组装机体各部件,构成不同类型飞机,如标准型、高空侦察型、特种作业型等,具备执行各任务的能力,方便组成不同规模、不同作业方式的作业机群。可快速拆卸与重新组装,快速形成所需要的作业力,快速投入作业场。遇到战损情况,可单独更换机体组件,避免机体部分损坏整机整修的局面,最大程度地提高作业效率。
44.4、由同一核心机部分与不同功能模块连接得到多类型飞机,涵盖侦察、对地、对空、渗透、反潜等多个方面功能,使无人
‑
有人协同体系功能不再单一,作业场存活能力不再低下。多机型通过多传感器感知作业场环境,同时上传信息至作业云,使作业体系拥有更加快速、更加敏锐的作业场感知能力,多机型的协同配合,使得实现风险更大、难度更高的作业场任务具备可能性。侦察、决策和打击于一体的作业体系可具备察打一体的快速攻击能力,在机会稍纵即逝的作业场上具备先机。
45.5、拓展型无人飞机设计有可收纳特征的鸭翼与背鳍,使飞机同时拥有全速度段高机动性能以及收纳完全体状态下的高隐身性能。相较于现阶段飞机拥有超强的机动性能,以及不逊色的隐身性能。
46.具体利用鸭翼与鳍的配合可保证飞行器在各速度区间均具备出色的机动性能,同时在高超声速的飞行状态下,收纳鸭翼、鳍可大幅减小阻力,激发高速性能。拓展型飞机主翼可折叠,机翼内部装有万向电磁连接口,用于挂载子无人机,同时机翼折叠后露出的万向轴连接口保证子无人机可在多方向转动,必要时刻充当飞行器推进器、转向结构作用。
47.6、整机布局未采用现阶段重型无人机普遍采用的飞翼布局,而是继续沿用现阶段五代机造型,搭配可收缩鸭翼,并让发动机进气口两侧坡度变小,让机体具有一定的翼身融合特征。同时拉长机身、缩小翼展,使机身呈狭长姿态。保留作业机构型,让无人机不仅作为主机僚机使用,也具备强大的单机作业能力,拥有超声速、超机动、高隐身性能等作业指标。
48.7、本发明的模块化协同作业无人机采用隐身设计,可搭配子无人机,装载蜂群无人机系统。以有人机、无人机、无人机子机、蜂群无人机为作业单位,可以构建四级作业系统。有人机承担作业场指挥和武器投射任务,远离作业场中心,降低被杀伤威胁;与各类型无人机配合组成不同类型作业编队,在飞机信息共享平台的协助下,可实现对海协同作业和特种渗透作业等多种作业任务。低成本子无人机与蜂群无人机深入作业区,最大程度探测作业场信息,降低作业损失。
附图说明
49.图1为本发明的模块化协同作业无人机各模块列表示意图;
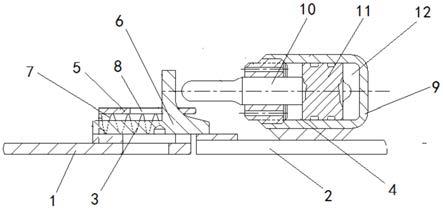
50.图2为本发明的模块化协同作业无人机内部布置设计示意图;
51.图3和图3a为标准型飞机结构示意图,其中的数据仅仅是此型飞机的其中一个示例,根据实际需要可以设计无数的可能的数据;
52.图4和图4a为截击型飞机结构示意图其中的数据仅仅是此型飞机的其中一个示例,根据实际需要可以设计无数的可能的数据;
53.图5和5a为拓展型飞机结构示意图其中的数据仅仅是此型飞机的其中一个示例,根据实际需要可以设计无数的可能的数据;
54.图6和6a为特种作业型飞机结构示意图其中的数据仅仅是此型飞机的其中一个示例,根据实际需要可以设计无数的可能的数据;
55.图7和7a为高空侦察型飞机结构示意图其中的数据仅仅是此型飞机的其中一个示例,根据实际需要可以设计无数的可能的数据;
56.图8为多机对接型飞机结构示意图;
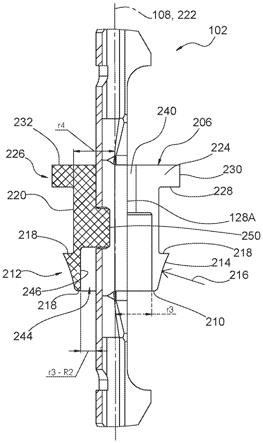
57.图9为方材丁字形接合对接榫卯的连接构件示意图;
58.图10为气动性能预示时的标准型物面网格示意图;
59.图11为气动性能预示时的计算网格和物面密度云示意图;
60.图12为空重
‑
最大起飞重量拟合曲线;
61.图13为涡扇发动机耗油率图;
62.图14为0.8马赫速度飞行升阻比等系数对照图;
63.图15为1.5马赫速度飞行升阻比等系数对照表;
64.图16为需用推力和可用推力的关系曲线图;
65.图17为平飞高度和马赫数的关系曲线图;
66.其中,1
‑
机头模块、2
‑
标准机翼模块、3
‑
大型机翼模块、4
‑
高空翼型模块、5
‑
下反尾翼模块、6
‑
上反尾翼模块、7
‑
子无人机模块、8
‑
特种作业用机翼模块、9
‑
核心机体模块(主战机模块)、91
‑
可收纳小翼面(即鸭翼和背鳍)、10
‑
电子设备、11
‑
主弹舱、12
‑
副弹舱、13
‑
油箱、14
‑
起落架、15
‑
航控炮弹、16
‑
发动机、17
‑
钻孔、18
‑
结合榫部分下侧尺寸较大。
具体实施方式
67.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本发明保护的范围。
68.如图1
‑
8所示,本发明的一种模块化协同作业无人机。利用核心机体模块和模块化其它组件的不同组合来实现“一机多用”,“多机合用”的目标,以最小成本实现作业机型的多样化。所谓“一机多用”就是一架飞机可以使用多种模块组成不同类型的作业无人机;“多机合用”就是多架作业无人机可以重复使用同一组件,或者多个飞机在通过组合实现某种功能。模块化的方式在不降低单体飞机作业能力的条件下最大程度降低成本,飞机各模块组件的快速、灵活组合可以提高快速反应与部署调派能力,降低作业损失维护成本,在飞机部分损伤的状况下快速更换模块组件,重新形成作业能力,及时响应,迅速投入作业。在模块化组建的多样化机型基础上,构建有人机、无人机、子无人机和蜂群无人机四级化作业体
系,拉长有人机与作业场距离,配合低成本无人机、子无人机来满足不同飞行任务、不同空域、不同作业背景的需求,形成未来协同作业的高效工作模式。具体技术方案如下:
69.本发明的一种模块化协同作业无人机,包括
70.核心机体模块,其用于容纳各型飞机所需要的动力单元(含燃料)、基本的载荷(武器)舱及基础航电单元;核心机体模块为所有型号通用,具备隐身修型,并且装有可收纳翼面用于满足高速
‑
低速状态下保证较好的操作性;
71.机头模块,其包括基本的对空/对地火控系统用于执行无人机最基本的任务
‑
攻击目标,其内部还可以安装不同电子设备用于不同用途,电子干扰模块,预警模块,用于执行不同任务;
72.机翼模块包括标准机翼模块、大型机翼模块和高空翼型模块中的一个模块或多个模块的组合,
73.标准机翼模块,其翼展最短,后掠角最大,适合用于无人机高速飞行,用于无人机的标准型与截击型,满足高空高速性能的需求。用于执行“优势争夺,穿透制空,发现即摧毁”等任务,做到“唯快不破”;
74.大型机翼模块,相对于前者翼展,翼面积更大。这样可以在机翼内容纳更多燃油用于提升机体航程与作业半径,从而扩大无人机的攻击范围。机翼面积的增大,虽然以牺牲部分高速性能为代价,但同时也可以携带更多武器,包括外挂式隐身修型的武器荚仓,大型杀伤武器等用于高效打击高价值目标,取得作业场主动权。用于无人机的拓展型。此外这种机翼的外端具有折叠关节,一方面可以收折减少停放空间,另一方面,机翼折叠后端口处连接杆露出,结合电磁连接可以将子无人机模块7进行对接,用于执行特种作业任务。
75.高空翼型模块,其翼展进一步延长并在外端有高空临界翼修型,飞机可以在非常高的空域以相当低的速度以发动机功率飞行,降低巡航油耗的同时也可以在目标上空长时间停留从而搜集详细情报,为整体作业场态势感知提供有利参考;用于无人机的高空侦察型。或者安装其他电子设备模块时可以用于战场预警,在有人主机的抽象化的生物语言指令下对其余战场上的无人机进行调配协助作战。如果受到对方的攻击,机身本身仍旧是高速飞机的底子,而且机翼后掠角较大,具有先天的高速性能优势,能够迅速脱离,保全自身,将有利情报快速传递。
76.尾翼模块,包括下反尾翼模块、上反尾翼模块中的一个模块或多个模块的组合,
77.下反尾翼模块,主要和高空翼型模块(侦察型)搭配使用,形成“倒v型尾翼”,由于主翼为了满足高空飞行采用了上反设计,下反尾翼可以有利于改善操纵性,尤其是翼面涡流效应与发动机气流之间关系的协调以改善操作;
78.上反尾翼模块,用于和其他型机翼模块搭配,被称为v型尾翼或者蝴蝶形尾翼,具有较大的外倾角,使之可以同时充当水平尾翼和垂直尾翼的作用。与传统的三或四片式相比由于减少到了两个,尾翼的总面积减小,一方面降低了后体的重量和阻力,也减少了雷达反射面积从而提高飞机的隐身性能。此外这一设计也可以改善飞机的操作性;
79.前述所有模块均设有对接端口,其对接端口均设置有对接榫卯和电磁铁用于连接其他模块,维持无人机整体结构;
80.所述核心机体模块、所述机头模块、所述机翼模块和所述尾翼模块能够彼此拆卸并且能够彼此机械地固定,从而能够重构成多种构型的无人机。
81.在一些实施例中,还包括子无人机模块,采用乘波体设计,在具有较强的高超音速性能的同时也具备较好的隐身性能,从而可以实现深入打击等高难度任务,主要有两种安装方式,一种是和折叠状态下的大型机翼模块进行对接形成特种作业用机翼模块,万向轴可以旋转,特种作业用机翼模块(合体后的子机)可以充当额外的“操作面”使飞机可以进行一些非常规机动,或者在起降时缩短距离以适应野无人机场或者是被破坏的机场,强化无人机在极端环境下的特种作业能力,用于无人机的特种作业型;子无人机模块上也有一个发射口,用与携带大量的微型“蜂群”无人机,可以携带各种小型非致命武器或者小型致命武器用于斩首行动等对精度要求非常高的任务;另一种是和标准型无人机(标准机翼模块)结合,采用一上一下的安装方式,特种作业用机翼模块(合体时)充当无人机的附加助推器。使之能够进行快速穿透制空瘫痪对方空中指挥,让对方空中作业力量陷入被动局面。或者在标准型与有人机在执行空优任务遇到“疑难目标”时及时出手将其摧毁,也可以把子无人机发射出去当作武器或者是“打手”使用。
82.在一些实施例中,核心机体模块还包括可收纳小翼面,所述可收纳小翼面包括鸭翼、背鳍,利用鸭翼与鳍的配合可保证飞机在各速度区间均具备出色的机动性能,同时在高超声速的飞行状态下,收纳鸭翼、鳍可大幅减小阻力,激发高速性能。
83.另外,搭配可收缩鸭翼,并让发动机的进气口两侧坡度变小,让机体具有一定的翼身融合特征。同时拉长机身、缩小翼展,使机身呈狭长姿态。
84.在实际应用中,延展性鸭翼对隐身的影响方面,鸭翼如果与主翼共面的话其对隐身几乎没有影响。而鸭翼如果不共面,确实会增加回波散射源,但在经隐身修形(优化后掠角、展长和形状等)和采取吸波或透波措施情况下,测试证明翼前缘和翼尖绕射的回波可以有效抑制到
‑
30~
‑
40dbm2以下。此外可收纳形式也在一定程度上避免鸭翼对隐身性能的过大影响。
85.在一些实施例中,机翼、尾翼等固定部件接口使用机械接口,具体选用对接榫卯的连接构件结构为方材丁字形接合,机翼、尾翼部分主要承受向上升力,连接构件主要承受切向方向的剪力作用以及向上的弯矩作用;方材丁字形结合榫部分下侧尺寸较大(如图9所示),承受较强的向上弯矩,在传统结构的基础上将进一步加宽结构,增大横截面积来抵抗较强的剪力作用;同时在榫部横向钻孔(如图9所示),配合机体连接口处销钉限制机翼轴向位移。同时为充分保证安全,在接口安装应力传感器和测距传感器,时刻检测接口处风险等级。子无人机等灵活部件的接口采用电磁铁接口与机械接口两种方式共同作用,电磁接口用于空中快速准确对接,机械接口用于完全对接后固定连接提升强度。
86.在一些实施例中,还包括吊舱,设有对接端口,其对接端口均设置有对接榫卯和电磁铁用于连接其他模块;吊舱主要有电子战吊舱,预警吊舱,侦查吊舱和武器吊舱,电子战吊舱内部含有干扰设备用于破坏对方雷达等系统使对方失去主动进攻能力,预警吊舱主要含有预警雷达元件用于进行作业场态势感知,侦查吊舱含有照相机,武器吊舱采用中空设计,内部可以容纳武器,包括导弹,精确制导炸弹等,设有舱门可以打开关闭,打开可以释放武器,关闭保证隐身和减小阻力;所有吊舱外部都进行外观和涂层隐身处理。
87.在一些实施例中,具体地,
88.由于机头模块中的设备可以更换,有一些其他的组合方式,现有以客机或运输机为基础设计的预警机,由于目标较大,速度较慢(因此实际上也是“活靶子”),通过机头模块
中携带的不同部件并进行无线连接,安装上大型机翼模块的飞机将翼尖折叠进行对接,多架飞机的对接使得这些飞机机头模块中的电子设备形成连线,从而能够执行大型飞机可以执行的任务,在遇到危险时自动分体重新切换到灵活的无人机机构型进行自卫反击。
89.在一些实施例中,还包括大型机翼模块和子无人机模块组合而成特种作业用机翼模块,大型机翼模块机翼的外端机翼翼尖处具有折叠关节,一方面可以收折减少停放空间,另一方面,机翼折叠后端口处露出对接口,带有卡榫和电磁铁,根部有万向轴转轴,与子无人机模块上对接口连接,结合电磁连接将子无人机模块进行牢固对接,用于执行特种作业任务。
90.在一些实施例中,所述无人机布局设计包括
91.尾翼设置:双蝶形尾翼,位于机身后侧,为保证四波瓣雷达反射特性,蝶型尾翼前后缘在水平面内的投影分别与机翼前后缘平行;采用尾翼外倾62.7~63.3
°
(最优选63
°
)的激进设计,确保雷达波不会返回接收机;出于大迎角机动性的要求,其尾翼采用宽间距布置,避开边条和机翼内部涡流,改善了剧烈机动下的俯仰、滚转和偏航控制;
92.主翼设置:主翼形状分为三种,分别为标准型机翼模块的标准型机翼、大型机翼模块的拓展型机翼、高空型机翼模块的高空型机翼,
93.标准型机翼前缘后掠角59.7~60.3
°
(最优选60
°
),后缘内段后掠角42.7~43.3
°
(最优选43
°
),后缘外段前掠角26.7~27.3
°
(最优选27
°
),安装位置为中单翼,安装角度为下反4.7~5.3
°
(最优选5
°
)。
94.拓展型机翼前缘后掠角47.7~48.3
°
(最优选48
°
),后缘内段后掠角28.7~29.3
°
(最优选29
°
),后缘外段前掠角30.7~31.3
°
(最优选31
°
),安装位置为中单翼,安装角度为下反4.7~5.3
°
(最优选5
°
)。
95.高空型机翼前缘后掠角47.7~48.3
°
(最优选48
°
),安装位置为中单翼,安装角度为上反4.7~5.3
°
(最优选5
°
)。
96.主操纵面设置:位于机翼后缘的气动操纵面,内侧为襟翼,外侧为副翼,内外侧操纵面均有参与增升和滚转控制,可以定位为
‑
多用途襟副翼;多用途体现在两副操纵面除了传统副翼和襟翼的功能外,还兼有减速板和阻力方向舵的作用,当内侧襟副翼同时下偏,外侧襟副翼同时上偏,在保证机翼不产生额外升力增量的同时,产生对称气动阻力,起到减速板的作用;当只有一侧襟副翼采用上/下偏时,则产生不对称阻力,起到阻力方向舵的作用;
97.进气道、发动机设置与布局:进气道设置在两侧肋部,发动机为两侧双发动机;
98.起落架形式与设置:前三点起落架布局,前起落架设置机头下侧,后起落架设置机身下侧。
99.在一些实施例中,所述无人机气动外形合理借鉴当前主流五代机并增加长细比进一步降低阻力,未来搭配国产新型变循环发动机,可在一定速度下启用冲压发动机以达到高超声速的目标,同时可具备高低空高超声速能力;为适应最大飞行马赫数2.5~2.7(最优选2.6)级别和以马赫数1.8~2.1(最优选2.0)巡航的性能指标,选用两台带加力适应性ace变循环发动机或者涡轮风扇发动机或者冲压喷气发动机中的一种与飞行状态相匹配;发动机选择为动力上未开燃烧室11.2
‑
11.7t,开燃烧室14.5
‑
15t;发动机最优选用两台带加力适应性循环发动机(ace),参考tbe
‑
1.6发动机,为达到设计指标中高超音速作业的要求,无人机将采用双发后置发动机,以满足完成超声速作业、强突防能力以及夺取制空权的无人
机任务。大航程也是对下一代作业飞机的要求。为同时满足高速与大航程的要求,我们选用ace自适应变循环发动机。ace变循环发动机技术是ge变循环发动机技术的进一步发展,ge变循环发动机可以实现发动机在涡轮喷气模式和小涵道比涡扇发动机模式之间的转换,而ace适应性循环则进一步扩大了转换的范围——发动机不但可以用涡喷模式高速工作,也可以在较大涵道的涡扇模式下非常省油、高效率地工作。
100.整机的外形设计,做到低空重、高载油系数、高载荷比,有较高的低空跨音速机动性能和极强的高空超音速飞行性能,核心机体模块干净构型选用了前缘59.7~60.3
°
(最优选60
°
)后掠,尾缘内段42.7~43.3
°
(最优选43
°
)后掠,外段26.7~27.3
°
(最优选27
°
)前掠的主翼,采用自动变弯技术,能根据当前的飞行状态匹配最合适的翼型,从而达到最大化升阻比、改善航向稳定性和减小抖振的作用;在辅助操纵面方面采用可收纳的近距耦合鸭翼和背鳍,具备二维矢量推力喷口;
101.主翼操纵面选用内侧襟副翼 外侧副翼,可联动和全动的布置,以兼顾起降性能和滚转性能;同时鸭翼的差动也有利于进一步提高横向操纵力矩,因而在18~22
°
(最优选20
°
)的攻角下,能保有高达517~523
°
/s(最优选520
°
/s)的横滚速率,同时需要的所用攻角较小,能很快拉到转弯过载;
102.所述无人机使用非常靠后的蝶形尾翼,与四尾常规相比,蝶形尾的气动表面浸润面积更小,减少了摩擦阻力;减少一对尾翼消灭了一部分干扰阻力;后机身横截面积分布更容易逼近面积律理想值,有利于降低波阻。有试飞数据证实:大型蝶尾在超音速飞行时保有充足的俯仰控制力矩,不需要推力矢量加成即可拥有较强的超音速机动性。
103.在超音速机动性能方面,蝶尾布局有高升阻比的加成,鸭式布局则能获得高升阻比和无负升力的双重加成,此布局没有传统水平尾翼,但装有鸭翼称鸭式布局。推重比相同时,蝶尾飞机的超音速持续过载可以达到常规飞机的1.15~1.27(最优选1.2)倍,而鸭式飞机的超音速持续过载则能够达到常规飞机的1.4~1.5(最优选1.44)倍。鸭翼与蝶尾的联动可以综合以上两种布局的优点,很大程度上消除蝶尾产生的负升力效应,并且提高尾翼的操纵容量。
104.针对这种高长细比的机身,为了提高亚跨音速下的纵/横向灵敏性和操纵性,发动机采用二元矩形矢量喷口提供俯仰/滚转方向上的控制。
105.在一些实施例中,为提高无人机的隐身性能,所述无人机的两台发动机对称安置在机身肋部,进气道采用双斜切乘波进气道,caret进气口不光在水平和垂直方向同时向后斜切,而且将矩形的进气道截面扭转成斜菱形的,避免了侧面的直立平面;caret进气口在水平方向向后斜切则避免了唇部和前进方向成直角;保证了无人机的隐身性能;
106.发动机采用ace适应性变循环发动机,外涵道包括在中涵道之外,但和传统涡扇发动机外涵道后缘开放,直接和核心发动机喷流混合的做法不同,ace的外涵道后端封闭,但发动机和中涵道的喷流,汇入内层喷管,从内测向外和核心发动机的喷流混合;如前所述,内层喷管的外壁是可调的,用于内层喷管的收敛
‑
扩张控制;温度较低的外涵道排气反而从内层喷管排出,这使得温度较高的核心发动机排气呈环形,不仅和较冷的环境空气混合,还和内层喷管的较冷空气混合,有助于迅速降低喷气温度,改善红外隐身性能;
107.所述无人机的叶片形支柱安装在内涵道与外涵道之间,围绕中心环形阵列排布,采用导热性较好的耐高温金属材料制成起到热交换作用,实际上相当于热交换器,外涵道
冷空气穿越核心发动机喷流时,已经带走一部分热量,降低排气温度;最后,中心尾椎和内层喷管有效地遮挡了涡轮,使得发动机的后向雷达隐身大有改善。
108.在具体实施例的最后给出了针对标准型无人机的一套设计指标数据,以证明本发明的可实施性。但显然不能作为对发明的技术方案的限定,根据本发明的技术方案可以设计出无数套能够达到本发明目的的设计指标数据。
109.最大平飞速度:2.6马赫
110.巡航速度:2.0马赫
111.最大航程:6000km
112.实用航程:5500km
113.作战半径:2500
‑
3000km
114.载弹量:弹舱至少挂载6枚中距导弹,4枚近距导弹,机翼挂架可外挂导弹。
115.布局设计
116.尾翼设置:双蝶形尾翼,位于机身后侧。为保证4波瓣雷达反射特性,蝶型尾翼前后缘在水平面内的投影分别与机翼前后缘平行。采用尾翼外倾63
°
的激进设计,确保雷达波不会返回接收机。出于大迎角机动性的要求,其尾翼采用宽间距布置,避开边条和机翼内部涡流,改善了剧烈机动下的俯仰、滚转和偏航控制。
117.主翼设置:主翼形状分为三种,分别为标准型、拓展型、高空型
118.a.标准型机翼前缘后掠角60
°
,后缘内段后掠角43
°
,后缘外段前掠角27
°
,安装位置为中单翼,安装角度为下反5
°
。
119.b.拓展型机翼前缘后掠角48
°
,后缘内段后掠角29
°
,后缘外段前掠角31
°
,安装位置为中单翼,安装角度为下反5
°
。
120.c.高空型机翼前缘后掠角48
°
,安装位置为中单翼,安装角度为上反5
°
。
121.主操纵面设置:位于机翼后缘的气动操纵面,内侧为襟翼,外侧为副翼,内外侧操纵面均有参与增升和滚转控制,可以定位为“多用途襟副翼”。“多用途”体现在两副操纵面除了传统副翼和襟翼的功能外,还兼有减速板和阻力方向舵的作用:当内侧襟副翼同时下偏,外侧襟副翼同时上偏,在保证机翼不产生额外升力增量的同时,产生对称气动阻力,起到减速板的作用;当只有一侧襟副翼采用上/下偏时,则产生不对称阻力,起到阻力方向舵的作用。
122.进气道、发动机设置与布局:进气道设置在两侧肋部,发动机为两侧双发。
123.起落架形式与设置:前三点起落架布局,前起落架设置机头下侧,后起落架设置机身下侧。
124.发动机选择
125.选用两台自适应ace变循环发动机,参考tbe
‑
1.6发动机即ace变循环发动机的一种,为达到设计指标中高超音速作战的要求,战机将采用双发后置发动机,以满足完成超声速作战、强突防能力以及夺取制空权的战斗任务。大航程也是对下一代作战飞机的要求。为同时满足高速与大航程的要求,我们选用ace自适应变循环发动机。ace变循环发动机技术是ge变循环发动机技术的进一步发展,ge变循环发动机可以实现发动机在涡轮喷气模式和小涵道比涡扇发动机模式之间的转换,而ace适应性循环则进一步扩大了转换的范围——发动机不但可以用涡喷模式高速工作,也可以在较大涵道的涡扇模式下非常省油、高效率
地工作。
126.气动性能预示
127.这里采用了一定的翼身融合设计,且最大设计马赫数2.6,相关气动性能参数无法通过文献获取,为此采用cfd软件cart3d对气动性能进行了预示。cart3d软件可以采取自动生成的直角网格对飞机扰流流场进行euler方程求解,通过物面压强积分得到气动力,对摩擦阻力进行工程修正。
128.计算空间网格和物面密度云图见图10和图11所示。
129.气动及隐身性能分析
130.气动设计
131.气动外形合理,借鉴当前主流五代机并增加长细比进一步降低阻力,未来搭配国产新型变循环发动机,可在一定速度下启用冲压发动机以达到高超声速的目标,同时可具备高低空高超声速能力。为了适应最大飞行马赫数2.6级别和以马赫数2.0巡航的性能指标,需要与飞行状态相匹配的动力系统。发动机选用两台带加力适应性循环发动机(ace)。
132.标准构型飞机其构型选用了前缘60度后掠,尾缘内段43度后掠,外段27度前掠的主翼,采用自动变弯技术,能根据当前的飞行状态匹配最合适的翼型,从而达到最大化升阻比、改善航向稳定性和减小抖振的作用。在辅助操纵面方面采用可收纳的近距耦合鸭翼和背鳍,具备二维矢量推力喷口。主翼操纵面选用内侧襟副翼 外侧副翼(可联动和全动)的布置,以兼顾起降性能和滚转性能。同时鸭翼的差动也有利于进一步提高横向操纵力矩,因而在20度的攻角下,能保有高达520
°
/s的横滚速率,同时需要的所用攻角较小,能很快拉到转弯过载。该机使用非常靠后的蝶形尾翼,与四尾常规相比,蝶形尾的气动表面浸润面积更小,减少了摩擦阻力;减少一对尾翼消灭了一部分干扰阻力;后机身横截面积分布更容易逼近面积律理想值,有利于降低波阻。
133.在超音速机动性能方面,蝶尾布局有高升阻比的加成,鸭式布局则能获得高升阻比和无负升力的双重加成。推重比相同时,蝶尾飞机的超音速持续过载可以达到常规飞机的1.2倍,而鸭式飞机的超音速持续过载则能够达到常规飞机的1.44倍。鸭翼与蝶尾的联动可以综合以上两种布局的优点,很大程度上消除蝶尾产生的负升力效应,并且提高尾翼的操纵容量。
134.针对这种高长细比的机身,为了提高亚跨音速下的纵/横向灵敏性和操纵性,采用二元矩形矢量喷口提供俯仰/滚转方向上的控制。
135.隐身性能
136.标准型飞机具有极为干净的机身曲线和机身表面,发动机尾喷口有外包处理,搭配未来先进隐身涂料具有极强的隐身性能;其他类型无人机加入子无人机挂载、外挂吊舱等牺牲部分隐身性能,但仍可通过机身材料和表面涂层保持一定隐身性能。
137.为提高无人机的隐身性能。两台发动机对称安置在机身肋部,进气道采用双斜切乘波进气道。caret进气口不光在水平和垂直方向同时向后斜切,将矩形的进气道截面扭转成斜菱形的,避免了侧面的直立平面。caret进气口在水平方向向后斜切则避免了唇部和前进方向成直角。保证了战机的隐身性能。
138.发动机采用ace适应性循环发动机,外涵道包括在中涵道之外,但和传统涡扇发动机外涵道后缘开放,直接和核心发动机喷流混合的做法不同,ace的外涵道后端封闭,但发
动机和中涵道的喷流,汇入内层喷管,从内测向外和核心发动机的喷流混合。如前所述,内层喷管的外壁是可调的,用于内层喷管的收敛
‑
扩张控制。温度较低的外涵道排气反而从内层喷管排出,这使得温度较高的核心发动机排气呈环形,不仅和较冷的环境空气混合,还和内层喷管的较冷空气混合,有助于迅速降低喷气温度,改善红外隐身。此外,叶片形支柱实际上相当于热交换器,外涵道冷空气穿越核心发动机喷流时,已经带走一部分热量,降低排气温度。最后,中心尾椎和内层喷管有效地遮挡了涡轮,使得发动机的后向雷达隐身大有改善。
139.数据论证
140.最大起飞重量、载油量和空重计算
141.a.根据同类飞机(如表1所示),假设三个最大起飞重量22000kg、24000kg、26000kg。
142.根据油箱尺寸,预估载油量6000kg。
143.根据挂载量,计算预估载弹量7000kg。
144.计算预估可有空重9000kg、11000kg、13000kg。
145.表1欧美、苏系各相似体型战机重量参数
146.机型空重最大起飞重量台风11000kg23500kg阵风(海军型)10196kg22200kgf/a
‑
18e13900kg29938kgf
‑
15c12973kg30800kgmig
‑
3511000kg29700kg
147.b.根据同类型战机数据拟合曲线,绘制假设空重
‑
最大起飞重量拟合曲线,如图12所示;
148.c.拟合直线求得最终设计空重:9315.74kg
149.d.载油量计算:根据飞机尺寸以及油箱设置,测量计算油箱尺寸约为8.9m3,计算得到载油量为6897kg。
150.e.最终设计参数:
151.最大起飞重量23212.74kg
152.空重9415.74kg
153.载油量6897kg
154.有效载荷量7000kg
155.航程计算
156.本机采用变循环发动机,预估巡航阶段涵道比约为0.4,根据图13耗油率约为0.9,计算巡航结束时飞机重量为137861.4n,根据breguet航程方程
[0157][0158]
根据图14为0.8马赫速度飞行升阻比等系数对照图,亚声速0.8巡航、巡航高度为
11000km状况下w
initial
=23212.74kg,w
final
=9453kg,v=576.7knots,c=0.9,计算得到航程6037.52km。
[0159]
根据图15为1.5马赫速度飞行升阻比等系数对照表,超声速1.5马赫巡航、巡航高度为11000km状况下:
[0160]
w
initial
=23212.74kg,w
final
=9453kg
[0161]
v=576.7knots,c=1.2
[0162]
计算得到航程4866.84km,作战半径为航程的0.4倍左右,即为1946.74km。
[0163]
翼载相关计算
[0164]
w/s=m/s (2)
[0165]
巡航重量取正常飞行重量,即指飞机有50%余油的重量,计算得到m=19763kg。s由机翼面积s1与机身部分面积s2组成
[0166]
s1=16.26m2,s2=15.91m2[0167]
s=2*(s1 s2)
[0168]
m按飞行重量计算:m=19763kg
[0169]
w/s=303.86kg/m2[0170]
最大平飞速度
[0171][0172]
由于没有yf120变循环发动机推力特性随高度和马赫数变化数据,本文参考类似发动机参数推导出yf120发动机(即ace变循环发动机)特性数据随高度和马赫数变化数据(巡航阶段)。
[0173]
表2马赫数与发动机推力表
[0174]
马赫数1.61.822.22.415km推力29.028.7328.327.687526.918km推力21.921.44221.020.4922022km推力18.918.49218.117.44417.2
[0175]
依照表2得出c
d
与马赫数的对应关系,并通过线性插值得到区间的函数关系;再利用公式2.7迭代运算,与表2.2的拟合直线比对,算出:
[0176]
飞行高度11000m的最大平飞速度为2.11m,
[0177]
飞行高度15000m的最大平飞速度为2.68m,
[0178]
飞行高度18000m的最大平飞速度为2.25m,
[0179]
飞行高度22000m的最大平飞速度为2.00m。
[0180]
失速速度计算
[0181][0182]
理论升限计算
[0183]
采用图表法计算理论升限。计算步骤如下:
[0184]
(a)给定一组马赫数和高度值,计算动压。这里给定高度10km、15km、18km、20km、22km、25km,给定马赫数0.8、1.5、2.0、2.8。
[0185]
动压计算公式:q=0.7*ma2*p
ꢀꢀꢀ
(5)
[0186]
计算结果如下:
[0187]
表3马赫数和高度给定时的动压表
[0188]
ma\h(km)1015182022250.811843.335395.7123361.7922452.3521791.5521124.9281.541636.718969.311818.88621.556298.4253954.825274020.833723.221011.215327.211197.27030.82.8145080.866097.4741181.9530041.3121946.5113780.37
[0189]
(b)计算平飞所需升力系数
[0190]
根据升重平衡公式(6)计算平飞所需升力系数。
[0191]
c
l
=g/q/s。
ꢀꢀꢀꢀꢀ
(6)
[0192]
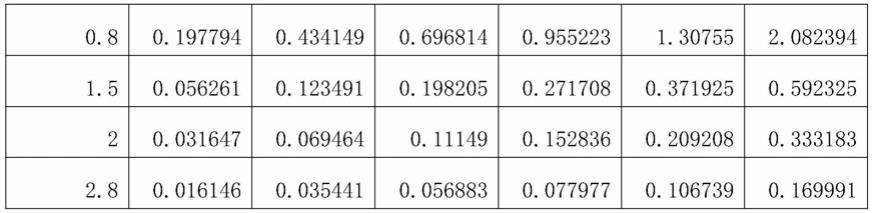
表4马赫数和高度给定时的升力系数表
[0193][0194][0195]
(c)插值得到平飞攻角
[0196]
通过升力系数随攻角变化曲线,插值得到平飞攻角。
[0197]
表5马赫数和高度给定时的平飞攻角表
[0198]
ma\h(km)1015182022250.86.1516.1727.338.2653.286.0511.52.4466.383410.7615.0620.9333.8421.5044.0896.969.7913.6422.122.80.752.454.356.228.7714.37
[0199]
(d)计算平飞阻力系数和需用推力
[0200]
通过升阻极曲线或阻力系数随马赫数和攻角变化曲线,得到平飞阻力系数。进而得到平飞需用推力:
[0201]
p
xy
=qs*cd
ꢀꢀꢀꢀꢀ
(7)
[0202]
需用推力计算结果如表6(单位为10kn):
[0203]
表6马赫数和高度给定时的需用推力表
[0204][0205][0206]
(e)计算发动机可用推力
[0207]
根据tbe
‑
1.6发动机推力随高度和马赫数变化数据
[7]
,插值补齐各计算马赫数和高度下推力数据。如表7(双发推力,单位为10kn):
[0208]
表7马赫数和高度给定时的可用推力表
[0209]
m\hh=10h=15h=18h=22h=25h=20m=1.669.95685843.837.831.840.8m=1.869.49957.4642.88436.9843139.8m=2.068.559456.64236.230.239m=2.267.506455.37540.98434.88828.838.8m=2.465.210853.84034.428.437.2m=2.664.350252.98439.08433.58427.836.4m=2.863.06651.93438.13432.8422735.6
[0210]
(f)按高度序列绘制需用推力和可用推力曲线图(如图16),求交点,得到对应高度平飞马赫数。
[0211]
(g)绘制平飞高度
‑
马赫数曲线,插值得到最大平飞高度(理论升限)平飞高度
‑
马赫数曲线如图17所示,插值得到最大平飞高度为18.8km。最终全机主要设计参数(标准型号):
[0212]
1)机身长度:25.00m
[0213]
2)翼展:11.5m
[0214]
3)机翼面积:16.26m2[0215]
4)高度:3.69m(不含起落架)
[0216]
5)推重比(空机):1.21(标准型)、1.26(截击型)、1.02(特种作战型)、1.10(侦察型)
[0217]
6)载油量:6897kg
[0218]
7)载弹量:7000kg
[0219]
8)最大起飞重量:23212.74kg。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。