1.本实用新型涉及清洗消毒辅助设备,尤其涉及一种达芬奇机器人手臂装载框及其浸泡冲洗装置。
背景技术:
2.随着医疗技术水平的不断提高,外科手术手段也在不断发展。目前机器人手术技术已经广泛地应用到泌尿外科、胸外科、心脏外科等手术领域,较传统手术相比,其在手术控制、成像技术、精准度等方面具有显著优势,为更多的高龄和危重患者带来福音。
3.每个达芬奇机器人至少配有4个机械手臂,每条机械手臂都有很多小关节,拥有7个自由度,一条机械手臂价格至少10万,使用寿命次数不超过10次。机械臂包括齿轮盒、轴杆、腕部和器械端,外壳底侧内置四个器械转盘,手臂腕部配有位置可互换的针持、抓钳、剪刀等。
4.目前医院消毒供应中心一般在接收手术室使用过的机械臂后,先反复冲洗并以酶液浸泡30min后超声清洗,单个手臂在浸泡池置放容易磕碰造成损伤,转移工作量大且取放困难,另外浸泡池中药液为静止状态,浸泡效果不佳。因此需要设计一种适用的达芬奇机器人手臂装载框及其浸泡冲洗装置。
技术实现要素:
5.有鉴于此,本实用新型提供了一种达芬奇机器人手臂装载框,解决了现有达芬奇机器人手臂浸泡过程存在的问题。
6.本实用新型一方面提供一种达芬奇机器人手臂装载框,包括方形网格的篮筐体、第一方形支撑架和第一方形支撑架组成,第一方形支撑架和第一方形支撑架的中间平行焊接固定支撑篮筐体,篮筐体底面两侧各设有滑轨,滑轨之间设有可滑动固定的第一横杆和第二横杆,第一横杆和第二横杆上分别设有若干固定夹,固定夹由竖立的第一弧形夹条和第二弧形夹条相向设置而成,第一弧形夹条和第二弧形夹条之间形成用于卡住手臂轴杆的c形卡槽。
7.优选地,固定夹外套设有c形硅胶护套,所述c形硅胶护套包括第一凸条、第二凸条及连接第一凸条、第二凸条的连接部,第一凸条和第二凸条下方分别设有供夹条插入的盲槽。
8.优选地,第一横杆靠近齿轮盒,配合篮筐体侧面限位手臂齿轮盒,第二横杆靠近手臂腕部,用于水平支撑固定手臂轴杆。
9.另一方面提供一种达芬奇机器人手臂的浸泡冲洗装置,包括方形箱体,方形箱体第一侧壁和第三侧壁的端面上分别水平设置两个固定台,固定台水平伸入箱体内,固定台用于固定垂直向下的电动升降柱,电动升降柱的丝杆末端设有配合支撑装载架的挂钩。
10.优选地,方形箱体的第二侧壁的中间处设置出液口,箱体的第二侧壁中间处设有进液口,进液口固定有旋转喷头,出液口设有出液阀,进液口设有进液阀,出液口和进液口
之间通过通管和水泵连接。
11.优选地,出液口和进液口对立设置。
12.采用本实用新型所提供的一种达芬奇机器人手臂装载框,可将多个达芬奇手臂固定实现批量浸泡冲洗,一方面防止手臂直接置放或者转移过程中碰撞损坏,另一方面方便移动手臂,便于操作且提高冲洗效率。
13.进一步地,采用一种达芬奇机器人手臂的浸泡冲洗装置,利用在箱体内设置可电动升降柱,支撑用于固定手臂的装载架在浸泡液中往复运动,使得手臂表面的污垢可流动液体的冲刷下可更为彻底的清除;
14.进一步地,利用水泵和旋转喷头将箱体内的浸泡药液横向循环且喷头直接冲洗手臂,提高浸泡和冲洗效果。
附图说明
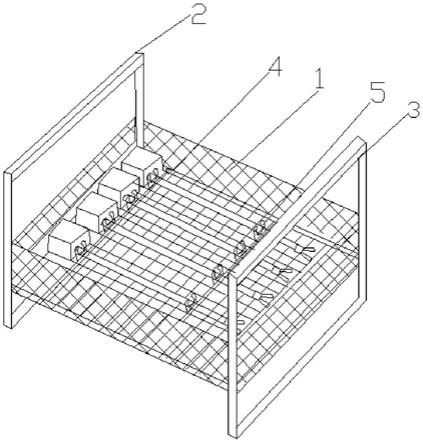
15.图1为本实用新型的一种达芬奇机器人手臂装载框的结构示意图;
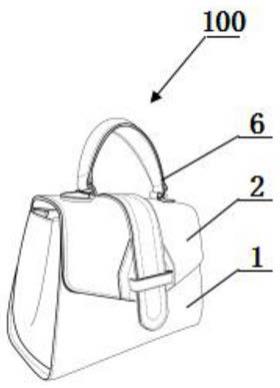
16.图2为达芬奇机器人手臂的结构示意图;
17.图3为图1的局部放大示意图;
18.图4为c形硅胶护套的结构示意图;
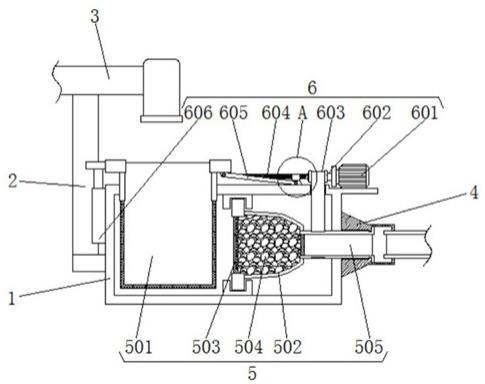
19.图5为一种达芬奇机器人手臂的浸泡冲洗装置的剖面示意图;
20.图6为一种达芬奇机器人手臂的浸泡冲洗装置另一个剖面示意图。
具体实施方式
21.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
22.实施例一,参考图1
‑
4,一种达芬奇机器人手臂装载框,包括方形网格篮筐体1、第一方形支撑架2和第一方形支撑架3组成,第一方形支撑架2和第一方形支撑架3上方为提手,下侧为底座,中间平行焊接固定支撑方形网格篮筐体1,篮筐体1上方开口,篮筐体1底面两侧各设有滑轨7,滑轨7之间设有2个可滑动固定的横杆4,分别为第一横杆和第二横杆,第一横杆和第二横杆上分别设有4个固定夹5,固定夹5由竖立的第一弧形夹条51和第二弧形夹条52相向设置而成,第一弧形夹条51和第二弧形夹条52之间形成c形卡槽,用于卡住机械臂6的轴杆62。固定夹5外套设有c形硅胶护套8,防止手臂在晃动过程中磨损。c形硅胶护套8包括第一凸条81、第二凸条82及连接第一凸条81、第二凸条82的连接部83,第一凸条81和第二凸条82下方分别设有供夹条插入盲槽。机械臂6由方形齿轮盒61、轴杆62、腕部63和器械端64组成,第一横杆靠近齿轮盒61,配合篮筐体1侧面限位齿轮盒61,第二横杆靠近腕部63,用于水平支撑固定轴杆62。
23.本实施例的装载框可将多个手臂固定并同时浸泡冲洗,一方面防止手臂直接置放或者转移过程中碰撞损坏,另一方面提高冲洗效率。另外只需将装载框转移即可进行后续的超声及烘干处理。
24.在另外一个实施例中,固定夹5为10个,横杆4两端设有套头,通过螺栓紧固件固定在滑轨7上。
25.实施例二:参考图5
‑
6,一种达芬奇机器人手臂的浸泡冲洗装置,包括方形箱体91,
箱体91第一侧壁和第三侧壁的端面上分别水平设置两个固定台92,固定台92水平伸入箱体91内,用于固定垂直向下的电动升降柱93,电动升降柱93包括电机和丝杆,电机固定在固定台92上,丝杆末端为挂钩94,用于配合支撑装载架。在电动升降柱93的往复运动下,用于固定手臂的装载架在浸泡液中往复运动,使得手臂表面的污垢可流动液体的冲刷下可更为彻底的清除,另外通过下降装载架进行浸泡冲洗,也可以上升将装载架转移出来,省力且方便取放。箱体91的第二侧壁中间处设置出液口,箱体91的第二侧壁中间处设有进液口,进液口固定有旋转喷头99,出液口设有出液阀96,进液口设有进液阀98,出液口和进液口之间通过通管95和水泵97连接。使得箱体91内的药液横向循环且喷头直接冲洗手臂,提高浸泡和冲洗效果。
26.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型保护的范围之内。
技术特征:
1.一种达芬奇机器人手臂装载框,其特征在于,包括方形网格的篮筐体、第一方形支撑架和第一方形支撑架组成,所述第一方形支撑架和第一方形支撑架的中间平行焊接固定支撑篮筐体,篮筐体底面两侧各设有滑轨,滑轨之间设有可滑动固定的第一横杆和第二横杆,第一横杆和第二横杆上分别设有若干固定夹,固定夹由竖立的第一弧形夹条和第二弧形夹条相向设置而成,第一弧形夹条和第二弧形夹条之间形成用于卡住手臂轴杆的c形卡槽。2.根据权利要求1所述的一种达芬奇机器人手臂装载框,其特征在于,所述固定夹外套设有c形硅胶护套,所述c形硅胶护套包括第一凸条、第二凸条及连接第一凸条、第二凸条的连接部,第一凸条和第二凸条下方分别设有供夹条插入的盲槽。3.根据权利要求1所述的一种达芬奇机器人手臂装载框,其特征在于,所述第一横杆靠近齿轮盒,配合篮筐体侧面限位手臂齿轮盒,第二横杆靠近手臂腕部,用于水平支撑固定手臂轴杆。4.一种达芬奇机器人手臂的浸泡冲洗装置,其特征在于,包括方形箱体,所述方形箱体第一侧壁和第三侧壁的端面上分别水平设置两个固定台,固定台水平伸入方形箱体内,固定台用于固定垂直向下的电动升降柱,电动升降柱的丝杆末端设有配合支撑权利要求1所述的达芬奇机器人手臂装载框的挂钩。5.根据权利要求4所述的一种达芬奇机器人手臂的浸泡冲洗装置,其特征在于,所述方形箱体的第二侧壁的中间处设置出液口,方形箱体的第二侧壁中间处设有进液口,进液口固定有旋转喷头,出液口设有出液阀,进液口设有进液阀,出液口和进液口之间通过通管和水泵连接。6.根据权利要求5所述的一种达芬奇机器人手臂的浸泡冲洗装置,其特征在于,所述出液口和进液口对立设置。
技术总结
本实用新型公开了一种达芬奇机器人手臂装载框,包括方形网格的篮筐体、第一方形支撑架和第一方形支撑架组成,第一方形支撑架和第一方形支撑架的中间平行焊接固定支撑篮筐体,篮筐体底面两侧各设有滑轨,滑轨之间设有可滑动固定的第一横杆和第二横杆,第一横杆和第二横杆上分别设有若干固定夹,固定夹由竖立的第一弧形夹条和第二弧形夹条相向设置而成,第一弧形夹条和第二弧形夹条之间形成用于卡住手臂轴杆的C形卡槽。采用本实用新型所提供的一种达芬奇机器人手臂装载框,可将多个达芬奇手臂固定实现批量浸泡冲洗,一方面防止手臂直接置放或者转移过程中碰撞损坏,另一方面方便移动手臂,便于操作且提高冲洗效率。便于操作且提高冲洗效率。便于操作且提高冲洗效率。
技术研发人员:叶梅妹
受保护的技术使用者:海南省人民医院
技术研发日:2021.03.15
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。