1.本发明属于医学影像识别技术领域,尤其涉及一种自动化可迁移人工智能医学影像识别系统及识别方法方法。
背景技术:
2.医学影像是指为了医疗或医学研究,对人体或人体某部分,以非侵入方式取得内部组织影像的技术与处理过程。它包含以下两个相对独立的研究方向:医学成像系统(medical imaging system)和医学图像处理(medical image processing)。前者是指图像行成的过程,包括对成像机理、成像设备、成像系统分析等问题的研究;后者是指对已经获得的图像作进一步的处理,其目的是或者是使原来不够清晰的图像复原,或者是为了突出图像中的某些特征信息,或者是对图像做模式分类等等;然而,现有自动化可迁移人工智能医学影像识别系统及识别方法对影像处理过程中由于影响不同的坏点对于x射线的响应不同,在固定曝光参数的图像中检测坏点,存在坏点的灰度值与正常像素点灰度值相差不大的情况,从而容易无法检测出该坏点,导致漏检;对于后面两种检测方法,检测效率和准确性偏低;同时,医学影像在成像过程中,由于人体个体差异天然导致大量客观干扰因素。以对肺部进行成像胸部x光为例,由于成像对象的个体差异,获取到的肺部图像大小不一,以现有的模板把肺部图像分割出来可能会由于个体差异导致分割不准确,在完成医学影像成像后,后续对医学影像的分割仍存在以上的缺陷。
3.综上所述,现有技术存在的问题是:现有自动化可迁移人工智能医学影像识别系统及识别方法对影像处理过程中由于影响不同的坏点对于x射线的响应不同,在固定曝光参数的图像中检测坏点,存在坏点的灰度值与正常像素点灰度值相差不大的情况,从而容易无法检测出该坏点,导致漏检;对于后面两种检测方法,检测效率和准确性偏低;同时,医学影像在成像过程中,由于人体个体差异天然导致大量客观干扰因素。以对肺部进行成像胸部x光为例,由于成像对象的个体差异,获取到的肺部图像大小不一,以现有的模板把肺部图像分割出来可能会由于个体差异导致分割不准确,在完成医学影像成像后,后续对医学影像的分割仍存在以上的缺陷。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种自动化可迁移人工智能医学影像识别系统及识别方法。
5.本发明是这样实现的,一种自动化可迁移人工智能医学影像识别系统包括:
6.影像采集模块、主控模块、影像增强模块、影像坏点检测模块、修复模块、影像分割模块、影像特征提取模块、影像特征识别模块、识别信息分析模块、识别信息存储模块、显示模块;
7.影像采集模块,与主控模块连接,用于通过医疗影像设备采集医学影像;
8.主控模块,与影像采集模块、影像增强模块、影像坏点检测模块、修复模块、影像分
割模块、影像特征提取模块、影像特征识别模块、识别信息分析模块、识别信息存储模块、显示模块连接,用于控制各个模块正常工作;
9.影像增强模块,与主控模块连接,用于通过图像增强算法对采集的医学影像进行增强;
10.影像坏点检测模块,与主控模块连接,用于通过影像检测程序对医学影像坏点进行检测;
11.修复模块,与主控模块连接,用于通过修复算法对医学影像进行修复;
12.影像分割模块,与主控模块连接,用于通过分割程序对医学影像进行分割;
13.影像特征提取模块,与主控模块连接,用于通过提取程序提取分割后医学影像特征;
14.影像特征识别模块,与主控模块连接,用于通过识别程序对医学影像特征进行识别;
15.识别信息分析模块,与主控模块连接,用于通过分析对医学影像特征识别结果进行分析;
16.识别信息存储模块,与主控模块连接,用于通过存储器存储医学影像、检测信息、特征提取结果、识别结果、分析结果;
17.显示模块,与主控模块连接,用于通过显示器显示医学影像、检测信息、特征提取结果、识别结果、分析结果。
18.本发明另一目的在于提供一种自动化可迁移人工智能医学影像识别方法包括以下步骤:
19.步骤一,通过影像采集模块利用医疗影像设备采集医学影像;
20.步骤二,主控模块通过影像增强模块利用图像增强算法对采集的医学影像进行增强;
21.步骤三,通过影像坏点检测模块利用影像检测程序对医学影像坏点进行检测;通过修复模块利用修复算法对医学影像进行修复;
22.步骤四,通过影像分割模块利用分割程序对医学影像进行分割;通过影像特征提取模块利用提取程序提取分割后医学影像特征;通过影像特征识别模块利用识别程序对医学影像特征进行识别;
23.步骤五,通过识别信息分析模块利用分析对医学影像特征识别结果进行分析;
24.步骤六,通过识别信息存储模块利用存储器存储医学影像、检测信息、特征提取结果、识别结果、分析结果;并通过显示模块利用显示器进行显示。
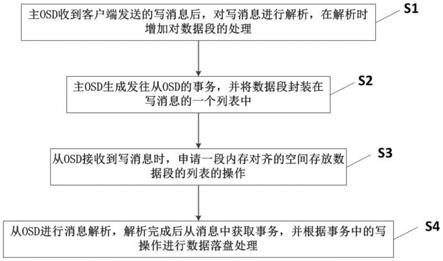
25.进一步,所述影像坏点检测模块检测方法如下:
26.(1)通过医疗影像设备采集医学图像并采用相同的平板探测器在不同曝光条件下获取的第一图像和第二图像;
27.(2)分别获取所述第一图像的灰度值的最大值maxa和最小值mina,以及第二图像的灰度值的最大值maxb和最小值minb;依据所述最大值maxa和最小值mina检测出所述第一图像的第一坏点集;
28.(3)依据所述最大值maxb和最小值minb检测出所述第二图像的第二坏点集;依据所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集。
29.进一步,所述获取采用相同的平板探测器在不同曝光条件下生成的第一图像和第二图像的步骤包括:
30.(1.1)分别采集在第一预设曝光参数下的低剂量图像序列和在第二预设曝光参数下的高剂量图像序列;其中,所述低剂量图像序列和所述高剂量图像序列含有相同的图像数量;
31.(1.2)对所述低剂量图像序列进行加权求平均处理得到所述第一图像;对所述高剂量图像序列进行加权求平均处理得到所述第二图像。
32.进一步,所述依据所述最大值maxa和最小值mina检测出所述第一图像的第一坏点集的步骤包括:
33.依据所述第一图像的灰度值生成所述第一图像的灰度直方图hista;
34.依据所述灰度直方图hista,所述最大值maxa和所述最小值mina生成所述第一坏点集。
35.进一步,所述依据所述灰度直方图hista,所述最大值maxa和所述最小值mina生成所述第一坏点集的步骤包括:
36.依据所述最大值maxa和所述最小值mina生成有效灰度值的起点值lefta和有效灰度值的终点值righta;
37.依据所述灰度直方图hista、所述有效灰度值的起点值lefta和所述有效灰度值的终点值righta计算出所述第一图像的灰度均值meana;
38.依据预设参数th1、预设参数th2和所述灰度均值meana从所述第一图像中筛选出所述第一坏点集。
39.进一步,所述依据所述最大值maxb和最小值minb检测出所述第二图像的第二坏点集的步骤包括:
40.依据所述第一图像的灰度值生成所述第二图像的灰度直方图histb;
41.依据所述灰度直方图histb,所述最大值maxb和所述最小值minb生成所述第二坏点集。
42.进一步,所述依据所述灰度直方图histb,所述最大值maxb和所述最小值minb生成所述第二坏点集的步骤包括:
43.依据所述最大值maxb和所述最小值minb生成有效灰度值的起点值leftb和有效灰度值的终点值rightb;
44.依据所述灰度直方图histb、所述有效灰度值的起点值leftb和所述有效灰度值的终点值rightb计算出所述第二图像的灰度均值meanb;
45.依据预设参数th1、预设参数th2和所述灰度均值meanb从所述第二图像中筛选出所述第二坏点集。
46.进一步,所述依据所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集的步骤包括:
47.合并所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集。
48.进一步,所述影像分割模块分割方法如下:
49.1)获取先验医学影像,通过数据集程序创建先验医学影像数据集;
50.2)根据所述先验医学影像数据集建立神经网络,以训练神经网络分割模型;在所述神经网络分割模型的解码层中加入注意力机制,获得医学影像分割模型。
51.进一步,所述在通过数据集程序创建先验医学影像数据集之前,还包括步骤:
52.对所述先验医学影像进行图像预处理,所述对所述先验医学影像进行图像预处理的过程,包括步骤:
53.对所述先验医学影像作图像旋转和图像翻转处理,以扩充先验医学影像数据集;
54.为所述图像旋转和图像翻转处理后的先验医学影像添加噪声扰动。
55.进一步,所述神经网络包括局部归一化层、多尺度卷积层、单尺度卷积单元层和分类层,所述多尺度卷积层用于对所述局部归一化层输出的特征图作多尺度卷积操作;
56.所述多尺度卷积操作如下式:
[0057][0058]
其中,为1*1卷积核,连接局部归一化层lrn的第j个输出特征图与多尺度卷积层的第i个输出特征图度卷积层的第i个输出特征图为偏置,nlrn为lrn层输出特征图的个数,relu()为激活函数,f
i3*3
、f
i5*5
同理;
[0059]
所述1*1卷积核的填充参数为0,3*3卷积核的填充参数为1,5*5卷积核的填充参数为2;
[0060]
所述多尺度卷积层输出的特征图如下式:
[0061][0062]
本发明另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述自动化可迁移人工智能医学影像识别方法。
[0063]
本发明的优点及积极效果为:本发明通过影像坏点检测模块采用相同的平板探测器在不同曝光条件下获取的第一图像和第二图像;分别获取所述第一图像的灰度值的最大值maxa和最小值mina,以及第二图像的灰度值的最大值maxb和最小值minb;依据所述最大值maxa和最小值mina检测出所述第一图像的第一坏点集;依据所述最大值maxb和最小值minb检测出所述第二图像的第二坏点集;依据所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集,除去人工参与过程,大幅度提高检测的效率,有效排除人工参与时主观因素的影响,提高检测的准确性;采用高剂量图像检测出的坏点和低剂量图像中检测出的坏点,有效避免了在特定剂量下,因坏点灰度值与正常像素点灰度
值比较接近而导致漏检情况的发生,提高检测的准确性;同时,通过影像分割模块在获取到待处理医学影像,通过医学影像分割模型对待处理医学影像作分割处理,以得到分割后的医学影像,为医护人员的诊断去除干扰信息。基于此,通过医学影像分割模型对医学影像进行分割,降低医护工作的负担以利于提高医护工作的效率。
附图说明
[0064]
图1是本发明实施例提供的自动化可迁移人工智能医学影像识别方法流程图。
[0065]
图2是本发明实施例提供的自动化可迁移人工智能医学影像识别系统结构框图。
[0066]
图3是本发明实施例提供的影像坏点检测模块检测方法流程图。
[0067]
图4是本发明实施例提供的获取采用相同的平板探测器在不同曝光条件下生成的第一图像和第二图像的步骤方法流程图。
[0068]
图5是本发明实施例提供的影像分割模块分割方法流程图。
[0069]
图2中:1、影像采集模块;2、主控模块;3、影像增强模块;4、影像坏点检测模块;5、修复模块;6、影像分割模块;7、影像特征提取模块;8、影像特征识别模块;9、识别信息分析模块;10、识别信息存储模块;11、显示模块。
具体实施方式
[0070]
为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。
[0071]
下面结合附图对本发明的结构作详细的描述。
[0072]
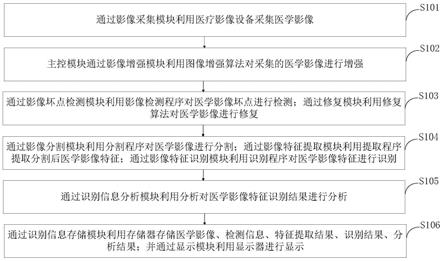
如图1所示,本发明提供的自动化可迁移人工智能医学影像识别方法包括以下步骤:
[0073]
s101,通过影像采集模块利用医疗影像设备采集医学影像;
[0074]
s102,主控模块通过影像增强模块利用图像增强算法对采集的医学影像进行增强;
[0075]
s103,通过影像坏点检测模块利用影像检测程序对医学影像坏点进行检测;通过修复模块利用修复算法对医学影像进行修复;
[0076]
s104,通过影像分割模块利用分割程序对医学影像进行分割;通过影像特征提取模块利用提取程序提取分割后医学影像特征;通过影像特征识别模块利用识别程序对医学影像特征进行识别;
[0077]
s105,通过识别信息分析模块利用分析对医学影像特征识别结果进行分析;
[0078]
s106,通过识别信息存储模块利用存储器存储医学影像、检测信息、特征提取结果、识别结果、分析结果;并通过显示模块利用显示器进行显示。
[0079]
如图2所示,本发明实施例提供的自动化可迁移人工智能医学影像识别系统包括:影像采集模块1、主控模块2、影像增强模块3、影像坏点检测模块4、修复模块5、影像分割模块6、影像特征提取模块7、影像特征识别模块8、识别信息分析模块9、识别信息存储模块10、显示模块11。
[0080]
影像采集模块1,与主控模块2连接,用于通过医疗影像设备采集医学影像;
[0081]
主控模块2,与影像采集模块1、影像增强模块3、影像坏点检测模块4、修复模块5、
影像分割模块6、影像特征提取模块7、影像特征识别模块8、识别信息分析模块9、识别信息存储模块10、显示模块11连接,用于控制各个模块正常工作;
[0082]
影像增强模块3,与主控模块2连接,用于通过图像增强算法对采集的医学影像进行增强;
[0083]
影像坏点检测模块4,与主控模块2连接,用于通过影像检测程序对医学影像坏点进行检测;
[0084]
修复模块5,与主控模块2连接,用于通过修复算法对医学影像进行修复;
[0085]
影像分割模块6,与主控模块2连接,用于通过分割程序对医学影像进行分割;
[0086]
影像特征提取模块7,与主控模块2连接,用于通过提取程序提取分割后医学影像特征;
[0087]
影像特征识别模块8,与主控模块2连接,用于通过识别程序对医学影像特征进行识别;
[0088]
识别信息分析模块9,与主控模块2连接,用于通过分析对医学影像特征识别结果进行分析;
[0089]
识别信息存储模块10,与主控模块2连接,用于通过存储器存储医学影像、检测信息、特征提取结果、识别结果、分析结果;
[0090]
显示模块11,与主控模块2连接,用于通过显示器显示医学影像、检测信息、特征提取结果、识别结果、分析结果。
[0091]
如图3所示,本发明提供的影像坏点检测模块4检测方法如下:
[0092]
s201,通过医疗影像设备采集医学图像并采用相同的平板探测器在不同曝光条件下获取的第一图像和第二图像;
[0093]
s202,分别获取所述第一图像的灰度值的最大值maxa和最小值mina,以及第二图像的灰度值的最大值maxb和最小值minb;依据所述最大值maxa和最小值mina检测出所述第一图像的第一坏点集;
[0094]
s203,依据所述最大值maxb和最小值minb检测出所述第二图像的第二坏点集;依据所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集。
[0095]
如图4所示,本发明提供的获取采用相同的平板探测器在不同曝光条件下生成的第一图像和第二图像的步骤包括:
[0096]
s301,分别采集在第一预设曝光参数下的低剂量图像序列和在第二预设曝光参数下的高剂量图像序列;其中,所述低剂量图像序列和所述高剂量图像序列含有相同的图像数量;
[0097]
s302,对所述低剂量图像序列进行加权求平均处理得到所述第一图像;对所述高剂量图像序列进行加权求平均处理得到所述第二图像。
[0098]
本发明提供的依据所述最大值maxa和最小值mina检测出所述第一图像的第一坏点集的步骤包括:
[0099]
依据所述第一图像的灰度值生成所述第一图像的灰度直方图hista;
[0100]
依据所述灰度直方图hista,所述最大值maxa和所述最小值mina生成所述第一坏点集。
[0101]
本发明提供的依据所述灰度直方图hista,所述最大值maxa和所述最小值mina生
成所述第一坏点集的步骤包括:
[0102]
依据所述最大值maxa和所述最小值mina生成有效灰度值的起点值lefta和有效灰度值的终点值righta;
[0103]
依据所述灰度直方图hista、所述有效灰度值的起点值lefta和所述有效灰度值的终点值righta计算出所述第一图像的灰度均值meana;
[0104]
依据预设参数th1、预设参数th2和所述灰度均值meana从所述第一图像中筛选出所述第一坏点集。
[0105]
本发明提供的依据所述最大值maxb和最小值minb检测出所述第二图像的第二坏点集的步骤包括:
[0106]
依据所述第一图像的灰度值生成所述第二图像的灰度直方图histb;
[0107]
依据所述灰度直方图histb,所述最大值maxb和所述最小值minb生成所述第二坏点集。
[0108]
本发明提供的依据所述灰度直方图histb,所述最大值maxb和所述最小值minb生成所述第二坏点集的步骤包括:
[0109]
依据所述最大值maxb和所述最小值minb生成有效灰度值的起点值leftb和有效灰度值的终点值rightb;
[0110]
依据所述灰度直方图histb、所述有效灰度值的起点值leftb和所述有效灰度值的终点值rightb计算出所述第二图像的灰度均值meanb;
[0111]
依据预设参数th1、预设参数th2和所述灰度均值meanb从所述第二图像中筛选出所述第二坏点集。
[0112]
本发明提供的依据所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集的步骤包括:
[0113]
合并所述第一坏点集和所述第二坏点集生成针对所述平板探测器获取的医学图像的坏点集。
[0114]
如图5所示,本发明提供的影像分割模块6分割方法如下:
[0115]
s401,获取先验医学影像,通过数据集程序创建先验医学影像数据集;
[0116]
s402,根据所述先验医学影像数据集建立神经网络,以训练神经网络分割模型;
[0117]
在所述神经网络分割模型的解码层中加入注意力机制,获得医学影像分割模型。
[0118]
本发明提供的在通过数据集程序创建先验医学影像数据集之前,还包括步骤:
[0119]
对所述先验医学影像进行图像预处理,所述对所述先验医学影像进行图像预处理的过程,包括步骤:
[0120]
对所述先验医学影像作图像旋转和图像翻转处理,以扩充先验医学影像数据集;
[0121]
为所述图像旋转和图像翻转处理后的先验医学影像添加噪声扰动。
[0122]
本发明提供的神经网络包括局部归一化层、多尺度卷积层、单尺度卷积单元层和分类层,所述多尺度卷积层用于对所述局部归一化层输出的特征图作多尺度卷积操作;
[0123]
所述多尺度卷积操作如下式:
[0124][0125]
其中,为1*1卷积核,连接局部归一化层lrn的第j个输出特征图与多尺度卷积层的第i个输出特征图度卷积层的第i个输出特征图为偏置,nlrn为lrn层输出特征图的个数,relu()为激活函数,f
i3*3
、f
i5*5
同理;
[0126]
所述1*1卷积核的填充参数为0,3*3卷积核的填充参数为1,5*5卷积核的填充参数为2;
[0127]
所述多尺度卷积层输出的特征图如下式:
[0128][0129]
以上所述仅是对本发明的较佳实施例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。