1.本发明涉及的是一种噪音监控领域的技术,具体是一种基于视频的振动定位和分析方法。
背景技术:
2.在建筑物和产线设备的振动监测与故障诊断中,需要对振动信号进行定位和分析。传统的接触式测量方法,如加速度计等,只能接触式单点测量。非接触式测量方法,如激光测振仪等,设备昂贵,只能点对点测量,测量距离有限。
3.视频分析振动位移,作为一种非接触测量手段,相较于传统的接触测量,具有自动化程度高、劳动成本低、测量范围广等优点。现有的视频分析方法,主要通过监控标志点位,通过对标志点像素点坐标变化来分析振动情况,需要高频仪器设备监测,受环境影响因素大,且对仪器分辨率要求高。
技术实现要素:
4.本发明针对现有振动分析方法受环境因素影响大、接触式、只能单点测量和局部测试、非接触式测量需要贴标志点等问题,提出一种基于视频的振动信号定位和分析方法,从通过对观测目标,采集视频,通过对视频图像进行频域特征选取和时域信号分析,对振动信号可以定位、定向和确定相应的振动信号。通过对观测目标进行视频采集,将视频图像从空域转化到频域,通过方向频域滤波找出不同方向特征,再从时域上来定位和分析振动信号,有效提高了振动信号的适用性。
5.本发明是通过以下技术方案实现的:
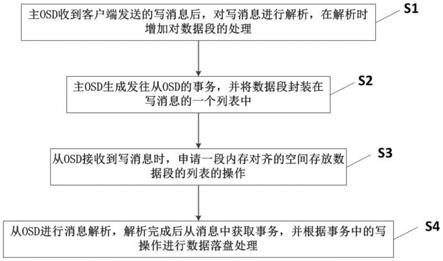
6.本发明涉及一种基于视频的振动信号定位和分析方法,对观测目标进行视频采集,将视频图像按帧分解并转化到频域后,对频域图像进行功率谱分析以定位初步振动区域;通过对频域图像在不同帧中叠加的时域信号,进行多方向频率滤波并比较信号的振动强度,确定振动方向;在频域图像的初步振动区域上按振动方向滤波后,比较滤波后的频域和空域上振幅强度得到精确振动区域;通过对精确振动区域内频域图像上的精确振动区域内的点的相位值,在时域上进行功率谱分析,得到最终振动信号。
7.所述的视频采集,优选为振动频率2.56倍以上的采样率拍摄振动物体。
8.所述的按帧分解,是指将拍摄的视频分解成单帧图像。
9.所述的转化是指:将按帧分解后的单帧图像进行图像彩色空间分解和转换,得到不同彩色空间下信号强度后,将对应的图像从空域转化到频域。
10.所述的彩色空间,包括但不限于hsv、yiq、yuv、ycbcr等色彩空间。
11.所述的初步振动区域,通过对频域图像的网格内的频域特征均值进行功率谱分析,根据不同区域在不同频率下的分布特征,得到初步振动区域。
12.所述的确定振动方向,通过以下方式得到:
13.①
设置振动方向为[0
°
,180
°
),根据振动方向精度需求,划分为多个振动方向滤波
并得到对应的garbor滤波参数;
[0014]
②
根据步骤
①
得到的参数对初步振动区域分别进行garbor滤波,得到不同方向的频率特征;
[0015]
③
取频域特征的时域信号,通过信号振动强度最大值确定振动方向。
[0016]
所述的精确振动区域,通过以下方式得到:
[0017]
i)对初步振动区域进行指定方向的garbor滤波,提取频域特征;
[0018]
ii)对频域特征取振幅和相位,振幅强度取指定百分比区域;
[0019]
iii)对振动区域的空域图像纹理的幅度和相位,取幅度指定区域;
[0020]
iv)对空域和频域强度筛选出来的区域做交集,得到信号较强区域即精确振动区域。
[0021]
所述的最终振动信号,通过对每帧频域图像的精确振动区域进行指定振动方向的garbor滤波,对滤波后的结果取均值,每帧均值结果叠加得到时域上的信号即为最终振动信号。技术效果
[0022]
本发明整体解决了现有技术只能单点测量和局部测试、非接触式测量需要贴标志点等问题,通过上述方法实现非接触无需标记点位的全自动测量,振动信号频率分析结果和加速度计一致性高的同时能够实现多区域测量和准确振动定位。
附图说明
[0023]
图1为本发明流程图;
[0024]
图2为本发明系统示意图;
[0025]
图3a和图3b为振动台及喇叭示意图;
[0026]
图4a和图4b为实施例场景示意图;
[0027]
图5为实施例喇叭振动分析结果图;
[0028]
图中:(a)为喇叭振动图;(b)为喇叭感兴趣区域(roi)绘制;(c)为喇叭roi区域7x7网格信号示意;(d)为(c)中信号图放大示意;(e)为喇叭roi区域7x7网格;(f)为喇叭roi区域振动精确定位;(g)为振动信号和功率谱结果;
[0029]
图6为实施例频域相位和振幅图;
[0030]
图中:(a)为频域图像0
°
方向相位图;(b)为频域图像90
°
方向相位图;(c)为频域图像0
°
方向振幅图;(d)为频域图像90
°
方向振幅图;
[0031]
图7为实施例效果示意图。
具体实施方式
[0032]
如图1
‑
图5所示,本实施例涉及一种基于视频的振动定位和分析系统,包括:视频采集单元、振动定向单元、振动定位单元以及振动分析单元,其中:视频采集单元采集待测对象的振动视频并按单帧图像的格式输出至振动定向单元;振动定向单元将图像转化到频域,进行多方向频域特征提取,通过比较确定在振动方向;振动定位单元根据指定方向的频域特征信息,进行网格绘制和功率谱分析,确定振动区域;振动分析单元根据振动区域和振动方向信息,进行区域信号取均值和功率谱计算,得到振动信号分析结果。
[0033]
本实施例以喇叭的振动和定位分析实验为例,待测对象为与相连的喇叭,本实施例通过如图3a所示的振动台和如图3b所示的喇叭的指定激励频率信号实验,通过发送图中所示的指定频率和振幅的激励电压作为振动信号,分析可得振动定位和振动信号分析的准确性。
[0034]
如图4所示,所述的视频采集单元采用basler_aca720
‑
520um高速相机,设置帧率200fps,分辨率720
×
540,采集5s数据。
[0035]
如图1所示,为本实施例基于上述系统的振动定位和分析方法,
[0036]
步骤1)按帧分解视频数据,得到1000张720
×
540图像;
[0037]
步骤2)为提高处理速度,选择感兴趣区域roi=[313,155,548,401],如图5(b)所示,rgb图像转化为yiq空间并归一化:
[0038]
步骤3)选取y通道,采用傅里叶变换从空域转化为频域图像,得到[42,78,1000]三维数组i(x,y,t),其中:t∈0,1000);
[0039]
步骤4)对每帧频域图像做两方向的garbor滤波,多帧的滤波结果组成维度为[2,42,78,1000]的信号数据signal
r疨w
,具体包括:
[0040]
步骤4.1)构建二维garbor滤波器,具体为:具体为:其中:x和y为频域图像点坐标,λ为滤波器的滤波尺度,θ为滤波器方向,ψ为相位偏移,σ为滤波器方差,γ为滤波器形状。
[0041]
步骤4.2)对1000帧频域图像中每一帧进行进行两方向的garbor滤波:得到原始(raw)信号数据signal
r疨w
。本实施例中g0°
(x,y;5,0,0,2π,0.5)和g
90
°
(x,y;5,90,0,2π,0.5)。
[0042]
步骤5)对时域上的滤波结果signal
r疨w
进行功率谱分析,得到在不同频率下的频率特征,绘制功率谱如图5(c)和图5(d)所示,具体包括:
[0043]
步骤5.1)本实施例根据图像大小设置网格为7
×
7,划分区域为49块,分别计算每块网格区域内的频域相位信号均值作为网格点信号,得到维度为[2,7,7,1000]的信号数据signal
roi7
×7;
[0044]
步骤5.2)对信号数据signal
roi7
×7计算49个网格点信号之间的交叉功率谱密度矩阵s,该矩阵维度与roi和帧率相关,即[49,49,100],矩阵元素为,矩阵元素为其中:i、j分别矩阵坐标即网格点信号的序号,w∈(0,100]为0到二分之一采样率之间的频率索引,r
ij
为第i个信号和第j个信号的自相关函数,h
i
为第i个信号的傅里叶变换结果,为第j个信号的傅里叶变换结果的共轭。
[0045]
步骤5.3)对交叉功率谱密度矩阵s分别在w处进行svd分解,得到第i个网格信号点在频率w处的功率谱,总共49个网格信号点(0~48)在100个频率处(1~100hz)的结果,通过频域分解法(fdd)得到网格点在不同频率处的分布signal
fdd
,维度为[49,100]。
[0046]
步骤6)比较不同网格点的频率分布signal
fdd
,得到在频率为20hz下的峰值较大,叠加光斑可视化效果如图5(e)所示;
[0047]
步骤7)在7
×
7共49个区域中,确定振动区域为31号区域的频率峰值最大,即初步振动区域roi
init
=[95,130,126,163];
[0048]
步骤8)在31号区域内,以方向为[0,180
°
)进行多方向garbor滤波,采用二分法逼近原则,确定振动方向为水平方向,图像上的振动角度θ=10
°
附近;
[0049]
步骤9)根据31号网格区域roi
init
=[95,130,126,163],进行振动角度θ=10
°
的garbor滤波,滤波结果分解得到相位图和振幅图,振幅图取前30%的区域作为roi
频域
;
[0050]
步骤10)根据31号网格区域roi
init
=[95,130,126,163],计算空域yiq图像y空间的纹理幅度图,振幅图取前30%的区域作为roi
空域
;
[0051]
步骤11)取两个区域的交集roi
频域
∩roi
空域
,并对交集区域进行形态学处理,通过先腐蚀再膨胀,然后做连通域取面积最大的区域,得到如图5(f)所示的最终区域roi
定位
;
[0052]
步骤12)在最终区域roi
定位
上,进行θ=10
°
时的garbor滤波g
θ
(x,y;5,0,0,2π,0.5),得到多维数组signal
l疨st
;
[0053]
步骤13)根据最终区域roi
定位
内每个点的坐标,计算每个点在时域上的功率谱结果,取功率谱结果的均值作为最终的信号频谱分析结果,相位信号和功率谱分析结果如图5(g)所示。
[0054]
如图6和图7所示,通过与加速度计进行频响分析,设置不同的激励频率,比较不同频率下分析的结果峰值,效果如图所示,加速度计和视频测振的频响曲线具有一致性,确保了测试结果的稳定性。
[0055]
与现有技术相比,本方法在不同激励频率实验,分析出的峰值频率准确度在98%左右;比较加速度计和视频测振的频响曲线,曲线相关性在95%以上,相关曲线绘制如图7所示。
[0056]
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。