1.本发明涉及无功补偿控制技术领域,具体为一种电动汽车并网无功补偿控制方法。
背景技术:
2.近年来,我国政府出台相关政策大力支持电动汽车的发展,使得越来越多电动汽车大规模接入电网。然而电动汽车作为负荷,具有时间以及空间上的不确定性,大规模电动汽车不确定性的充电行为会对配电网的经济安全运行产生很大影响。
3.像充电站这样的大型用电场所需要配备无功补偿装置,比如静止无功发生器(svg),通过调节电压源变流器交流侧输出电压的幅值和相位就可以使变流器输出连续变化的容性或者感性无功电流,实现无功补偿的目的。因此电动汽车充不仅是一种可调度的柔性负荷资源,也是具有无功补偿作用的资源。由于大规模电动汽车并网会对电网电能质量带来问题,比如峰上加峰问题、加剧负荷峰谷差、电压水平超出允许限值等。为了解决上述问题,必须对含电动汽车充电的配电网无功优化问题进行研究。
4.传统无功优化问题是通过对电力系统中的发电机机端电压、变压器分接头以及无功补偿器投切这些变量的控制,达到降低网损的目的。考虑到电动汽车充电站自身配备的无功补偿装置,本文含电动汽车充电的无功优化在传统无功优化问题的基础上加上对电动汽车充电站功率因数的控制进行无功补偿。首先对充电站负荷建模得到负荷曲线,接入配电网计算潮流得到每个节点的有功无功,以及网络损耗等。在状态变量以及控制变量的约束下,以有功损耗最小、负荷波动最小以及电压波动最小为目标函数,建立多目标无功优化模型。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种电动汽车并网无功补偿控制方法,解决了大规模电动汽车并网会对电网电能质量带来问题,比如峰上加峰问题、加剧负荷峰谷差、电压水平超出允许限值等问题。
7.(二)技术方案
8.为实现以上目的,本发明通过以下技术方案予以实现:一种电动汽车并网无功补偿控制方法,包括如下步骤:
9.步骤一:获取当前电动汽车充电站的负荷功率水平以及充电站所在区域电网的负荷值,对充电站所在区域电网进行潮流计算;
10.步骤二:结合充电站的负荷功率以及所在区域电网的潮流状况,计算充电站无功功率;
11.步骤三:计算当前电动汽车充电站负载率和区域电网的负荷率;
12.步骤四:基于充电站负载率和区域电网的负荷率,计算充电站无功补偿量,建立电
动汽车充电站主动无功补偿模型;
13.步骤五:以配电网有功损耗最小、负荷波动最小以及各节点电压偏差最小为目标,建立多目标无功优化模型。
14.优选的,所述步骤一具体为:首先要对电动汽车充电站建立数学模型,获取待优化时段充电站的充电负荷值p
c
;获取待优化时段充电站所在区域电网各节点的负荷值s1,s2,s3,
……
s
j
,
……
;对充电站所在区域电网进行潮流计算。
15.优选的,在已知充电负荷值p
c
以及所在区域电网负荷值s1,s2,s3,
……
s
j
,
……
;的基础上,计算区域电网的潮流分布,具体为:
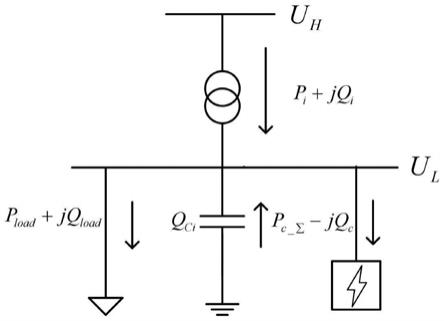
[0016][0017]
其中p
i
是电动汽车充电站所在节点i的有功负荷,p
load
是节点i的基础负荷。
[0018]
1、根据基尔霍夫电流定律,从第一层节点开始遍历,支路上各节点电流如式:
[0019][0020]
2、结合上述公式,除末节点外,一层一层逐步计算其他节点的注入电流:
[0021][0022]
3、计算出整个配电网的支路电流后,结合已知的根节点电压,依次计算各节点的电压:
[0023]
u
j
=u
i
‑
i
ij
z
ij
=u
i
‑
i
ij
(r
ij
jx
ij
)
[0024]
其中z
ij
=r
ij
jx
ij
为始端节点i与各子节点j之间的阻抗。
[0025]
4、计算各节点的电压修正量
[0026]
δu
j
=|u
j
‑
u
j
(0)|
[0027]
5、判别收敛条件
[0028]
maxδu
j
(k)<ω
[0029]
其中最大修正量小于阈值ω的时候跳出迭代,k为迭代次数。
[0030]
优选的,结合电动汽车充电站的有功负荷值p
c
,计算充电站负载率α,具体为:
[0031]
α=p
c_∑
/p
c_max
[0032]
其中,p
c_∑
为待优化时段充电站总的有功负荷;p
c_max
为充电站额定有功功率。
[0033]
结合充电站所在区域电网负荷值,计算区域电网负荷率β:
[0034]
β=p
load_∑
/p
load_max
[0035]
其中,p
load_∑
为待优化时段区域电网的有功负荷值;p
load_max
为区域电网一年内的最大有功负荷。
[0036]
优选的,结合电动汽车充电站负载率α以及充电站所在区域电网负荷率β,建立充电站主动参与电网无功补偿模型,得到充电站并网点功率因数控制目标范围:
[0037][0038]
其中,α
max
、α
min
分别为电动汽车充电站高峰和低谷时段的负载率阈值;β
max
、β
min
分
别为负荷高峰和低谷时段区域电网的负荷率阈值;a、b为相应的权重系数,且a b=0.1。
[0039]
优选的,基于充电站并网点功率因数控制目标计算充电站无功补偿量q
c
:
[0040]
补偿前:
[0041]
有功功率:
[0042]
无功功率:
[0043]
补偿后:有功功率不变,功率因数提升至
[0044]
视在功率:
[0045]
无功功率:
[0046]
则需求的补偿容量为:
[0047][0048]
优选的,在建立电动汽车充电站主动参与电网无功补偿模型后,以配电网有功损耗最小、负荷波动最小以及各节点电压偏差最小为目标,建立多目标无功优化模型,目标函数为:
[0049]
min[f1,f2,f3]
[0050][0051][0052][0053]
根据电网实际运行情况设置约束条件,分为等式约束和不等式约束。
[0054]
功率平衡方程:
[0055][0056]
不等式约束包括状态变量的不等式约束,发电机无功出力上下限:q
gimin
≤q
gi
≤q
gimax
;节点电压上下限:u
imin
≤u
i
≤u
imax
;控制变量的不等式约束,无功补偿容量的上下限:q
cimin
≤q
ci
≤q
cimax
;发电机机端电压的上下限:u
gimin
≤u
gi
≤u
gimax
;变压器变比的上下限:t
timin
≤t
ti
≤t
timax
;电动汽车充电站功率因数控制目标上下限:
[0057]
(三)有益效果
[0058]
本发明提供了一种电动汽车并网无功补偿控制方法。具备以下有益效果:
[0059]
该电动汽车并网无功补偿控制方法在传统无功优化问题的基础上加上对电动汽车充电站功率因数的控制进行无功补偿。首先对充电站负荷建模得到负荷曲线,接入配电网计算潮流得到每个节点的有功无功,以及网络损耗等。在状态变量以及控制变量的约束下,以有功损耗最小、负荷波动最小以及电压波动最小为目标函数,建立多目标无功优化模型,解决了电动汽车接入的谐波污染和无功不足的问题。
附图说明
[0060]
图1为电动汽车充电站并网接入示意图。
具体实施方式
[0061]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0062]
本发明提供一种技术方案:一种电动汽车并网无功补偿控制方法,包括如下步骤:
[0063]
步骤一:获取当前电动汽车充电站的负荷功率水平以及充电站所在区域电网的负荷值,首先要对电动汽车充电站建立数学模型,获取待优化时段充电站的充电负荷值p
c
;获取待优化时段充电站所在区域电网各节点的负荷值s1,s2,s3,
……
s
j
,
……
;对充电站所在区域电网进行潮流计算;
[0064]
在已知充电负荷值p
c
以及所在区域电网负荷值s1,s2,s3,
……
s
j
,
……
;的基础上,计算区域电网的潮流分布,具体为:
[0065][0066]
其中p
i
是电动汽车充电站所在节点i的有功负荷,p
load
是节点i的基础负荷。
[0067]
1、根据基尔霍夫电流定律,从第一层节点开始遍历,支路上各节点电流如式:
[0068][0069]
2、结合上述公式,除末节点外,一层一层逐步计算其他节点的注入电流:
[0070][0071]
3、计算出整个配电网的支路电流后,结合已知的根节点电压,依次计算各节点的电压:
[0072]
u
j
=u
i
‑
i
ij
z
ij
=u
i
‑
i
ij
(r
ij
jx
ij
)
[0073]
其中z
ij
=r
ij
jx
ij
为始端节点i与各子节点j之间的阻抗。
[0074]
4、计算各节点的电压修正量
[0075]
δu
j
=|u
j
‑
u
j
(0)|
[0076]
5、判别收敛条件
[0077]
maxδu
j
(k)<ω
[0078]
其中最大修正量小于阈值ω的时候跳出迭代,k为迭代次数。
[0079]
结合电动汽车充电站的有功负荷值p
c
,计算充电站负载率α,具体为:
[0080]
α=p
c_∑
/p
c_max
[0081]
其中,p
c_∑
为待优化时段充电站总的有功负荷;p
c_max
为充电站额定有功功率。
[0082]
步骤二:结合充电站的负荷功率以及所在区域电网的潮流状况,计算充电站无功功率;
[0083]
步骤三:计算当前电动汽车充电站负载率和区域电网的负荷率;
[0084]
结合充电站所在区域电网负荷值,计算区域电网负荷率β:
[0085]
β=p
load_∑
/p
load_max
[0086]
其中,p
load_∑
为待优化时段区域电网的有功负荷值;p
load_max
为区域电网一年内的最大有功负荷。
[0087]
结合电动汽车充电站负载率α以及充电站所在区域电网负荷率β,建立充电站主动参与电网无功补偿模型,得到充电站并网点功率因数控制目标范围:
[0088][0089]
其中,α
max
、α
min
分别为电动汽车充电站高峰和低谷时段的负载率阈值;β
max
、β
min
分别为负荷高峰和低谷时段区域电网的负荷率阈值;a、b为相应的权重系数,且a b=0.1。
[0090]
步骤四:基于充电站负载率和区域电网的负荷率,计算充电站无功补偿量,建立电动汽车充电站主动无功补偿模型;
[0091]
基于充电站并网点功率因数控制目标计算充电站无功补偿量q
c
:
[0092]
补偿前:
[0093]
有功功率:
[0094]
无功功率:
[0095]
补偿后:有功功率不变,功率因数提升至
[0096]
视在功率:
[0097]
无功功率:
[0098]
则需求的补偿容量为:
[0099][0100]
步骤五:以配电网有功损耗最小、负荷波动最小以及各节点电压偏差最小为目标,建立多目标无功优化模型。
[0101]
建立电动汽车充电站主动参与电网无功补偿模型后,以配电网有功损耗最小、负荷波动最小以及各节点电压偏差最小为目标,建立多目标无功优化模型,目标函数为:
[0102]
min[f1,f2,f3]
[0103][0104][0105][0106]
根据电网实际运行情况设置约束条件,分为等式约束和不等式约束。
[0107]
功率平衡方程:
[0108][0109]
不等式约束包括状态变量的不等式约束,发电机无功出力上下限:q
gimin
≤q
gi
≤q
gimax
;节点电压上下限:u
imin
≤u
i
≤u
imax
;控制变量的不等式约束,无功补偿容量的上下限:q
cimin
≤q
ci
≤q
cimax
;发电机机端电压的上下限:u
gimin
≤u
gi
≤u
gimax
;变压器变比的上下限:t
timin
≤t
ti
≤t
timax
;电动汽车充电站功率因数控制目标上下限:
[0110]
综上所述,该电动汽车并网无功补偿控制方法在传统无功优化问题的基础上加上对电动汽车充电站功率因数的控制进行无功补偿。首先对充电站负荷建模得到负荷曲线,接入配电网计算潮流得到每个节点的有功无功,以及网络损耗等。在状态变量以及控制变量的约束下,以有功损耗最小、负荷波动最小以及电压波动最小为目标函数,建立多目标无功优化模型,解决了电动汽车接入的谐波污染和无功不足的问题。
[0111]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0112]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。