1.本发明涉及时间同步领域。尤其是一种网络节点间的时间同步方法及装置,主要是多节点分布式电子信息系统所需的高精度时间同步,特别是固定网络节点之间时间信号5纳秒精度的实时高精度同步方法。
背景技术:
2.在固定应用的多节点分布式电子信息系统中,需要全网5纳秒的时间同步精度,是实现信号级和数据级数据融合的基础。
3.现有的车、船、固定设施等平台应用中,利用导航系统终端获得与时间协调时(utc)同步的标准时间,如卫星导航授时精度为50ns,使得两个异地节点之间的时间差在百纳秒之内。
4.卫星双向、网络时间传递等方法,依赖于租用转发信号的卫星以及固定的光纤网络使得这些方法的使用存在局限性。互发信号的微波双向时间传递方法受到视距的限制。卫星共视时间传递方法普遍应用于异地时间钟组之间的时间传递,提供两地本地钟的时间偏差,类似纸面时。常见的卫星共视设备时间传递精度在10
‑
20ns。
5.在组网应用中,需要一种能够实时获得从站与主站两个异地节点间时间信号的严格同步与时间的跟随的方法,从而实现整个网络高精度的时间同步。
技术实现要素:
6.为了克服现有技术的不足,本发明提供一种固定网络节点间纳秒级时间同步方法及实现装置,解决异地时间信号实时高精度同步的问题,达到5纳秒的时间同步精度。本发明解决的技术问题是:在一个固定网络时频同步装置中建立具有驯服到卫星时间的本地钟基准,利用卫星共视法估计从站与主站之间本地钟的时间差,然后利用相位级的时间控制方法调整从站时间,使之与主站时间同步,最终达到覆盖500公里范围内的全网时间同步。
7.本发明解决其技术问题所采用的技术方案的具体步骤如下:
8.a)在时基模块上利用北斗接收模块输出的1pps信号进行时间驯服获得本地钟;
9.b)在时基模块上测量北斗接收模块输出1pps和本地钟之间的时差;
10.c)在数据处理模块上实时采集北斗接收模块的测量数据;
11.d)在数据处理模块上计算本地钟与北斗系统时钟时差形成共视数据;
12.e)主站广播共视数据;
13.f)从站接收主站共视数据,在数据处理模块上计算主从站本地钟时差;
14.g)在时基模块上利用主从站本地钟时差数据调整从站本地钟1pps相位;
15.h)以16分钟为周期重复步骤a)至步骤g),从站可获得与主站高精度时间同步。
16.所述固定网络节点间纳秒级时间同步方法的详细步骤为:
17.步骤a)在时基模块上利用北斗接收模块输出的1pps信号进行时间驯服获得本地钟;
18.在时基模块上利用北斗接收模块每秒一次提供的bd 1pps信号进行时间驯服处理,时间驯服采用数字频率控制锁相环,以1s一次的频率测得铷钟模块与外输入bd1pps的相位差值,剔除抖动大于
±
20ns的相位差值,进行长度为m的滑动平均;对滑动平均后的相位差值进行卡尔曼滤波,消除随机抖动,获得与bd 1pps同步的高稳定的1pps,经过时间控制模块调整得到本地钟t
a
,在开机时时间控制模块的首次调整量为零;
19.b)在时基模块上测量北斗接收模块输出1pps和本地钟之间的时差;
20.在时基模块上每秒一次测量北斗接收模块输出bd 1pps和本地钟t
a
之间的时差t
bd
‑
a
;
21.c)在数据处理模块上实时采集北斗接收模块的测量数据;
22.数据处理模块从北斗接收模块每秒一次获得bd 1pps输出时刻的bd观测数据,bd观测数据包括卫星、仰角、卫星方位角、伪距、电离层延迟、对流层延迟、卫星星历及卫星钟修正参数数据;
23.d)在数据处理模块上计算本地钟与北斗系统时钟时差形成共视数据;
24.以16分钟为一个周期,接收数据时间段为13分钟,处理数据时间段为3分钟;利用步骤c)获得的bd观测数据,按照公式(1)每秒一次计算bd 1pps与卫星钟的时差t
bd
‑
sv
;
25.t
bd
‑
sv
=(pr
‑
r
‑
d
ion
‑
d
tro
)/c
‑
d
sv
ꢀꢀ
(1)
26.其中,pr为卫星伪距,单位为米,r为本地距离卫星的真实距离,单位为m,采用已知的北斗卫星信号接收天线的精确位置和卫星位置计算得到,d
ion
为电离层延迟,单位为m,d
trop
为对流层延迟,单位为m,d
sv
为卫星钟误差,单位为s,c为光速;
27.然后利用步骤b)获得的时差t
bd
‑
a
,利用公式(2)将t
bd
‑
sv
与t
bd
‑
a
相减:
28.t
a
‑
sv
=t
bd
‑
sv
‑
t
bd
‑
a
ꢀꢀ
(2)
29.计算得到本地钟t
a
与北斗系统时钟的时差t
a
‑
sv
;
30.以每15秒为一个时段,共分为52段,对每15秒钟测得的t
a
‑
sv
数据用最小二乘法作二次曲线拟合,得到52个曲线中点值,分别再用最小二乘法对52个中点值作线性拟合,得到拟合后直线中点值为本地钟与bds系统时钟之间的偏差refbds,拟合后直线的斜率是srbds;
31.针对所有仰角大于15
°
的可见星处理,每16分钟形成一组共视数据,共视数据包括:卫星号、refbds和srbds;
32.主站和从站数据类型和计算方法相同。
33.e)主站广播共视数据
34.主站共视数据通过通信网络广播;
35.f)从站接收主站共视数据,在数据处理模块上计算从站相对主站本地钟时差;
36.从站接收主站共视数据,在数据处理模块上每16分钟计算一次从站与主站本地钟的时间差,选取主站和从站共视的卫星组对应的refbds,按照公式(3)对所有共视卫星的主站和从站的refbds进行求差后再平均:
[0037][0038]
其中,n为共视卫星总数,为从站本地钟与bds系统时钟之间的偏差,
为主站本地钟与bds系统时钟之间的偏差;
[0039]
计算获得从站相对主站本地钟时差t
a
‑
o
;
[0040]
g)在时基模块上利用主从站本地钟时差数据调整从站本地钟相位;
[0041]
时基模块利用t
a
‑
o
对时间驯服模块输出的1pps进行相位调整得到本地钟t
a
,调整精度小于0.5ns;当从站设备开机后进入粗调整阶段,先剔除t
a
‑
o
超出
±
200ns的数值;依次检测每次t
a
‑
o
数值,当出现t
a
‑
o
绝对值小于等于10ns时,进入细调整阶段;在细调整阶段,剔除t
a
‑
o
超出
±
10ns的数值;
[0042]
h)以16分钟为周期不断重复步骤a)到步骤g),从站获得与主站高精度时间同步;
[0043]
设备开机后至少经过2次步骤g)的从站本地钟调整过程,之后持续获得从站本地钟与主站本地钟高精度同步,达到主从站本地钟时间同步效果。
[0044]
所述m取值范围为100
‑
200s。
[0045]
本发明还提供一种固定网络节点间纳秒级时间同步方法的实现装置,北斗接收模块通过天线接收北斗卫星信号,实现信号接收和导航数据解调,获得bd观测数据和bd 1pps;北斗接收模块将bd 1pps信号分两路输入时基模块,一路进入时间驯服模块用于时间驯服,铷钟模块输入的10mhz作为时间驯服数字频率控制锁相环的参考信号,经过时间驯服获得1pps和10mhz,时间驯服输出的1pps经过时间控制模块调整相位后成为本地钟t
a
的1pps,时间驯服输出的10mhz直接成为本地钟t
a
的10mhz;另外一路bd 1pps进入时差测量模块,用于测量bd 1pps与本地钟t
a
的1pps之间的时差t
bd
‑
a
,t
bd
‑
a
输出至数据处理模块;
[0046]
北斗接收模块输出bd观测数据至数据处理模块,bd观测数据包括卫星、仰角、卫星方位角、伪距、电离层延迟、对流层延迟、卫星星历及卫星钟修正参数数据;在数据处理模块中进行本站共视数据处理,生成本站共视数据;用于主站的装置只输出共视数据,不做两站时差处理;用于从站的装置不输出共视数据,接收主站共视数据,利用从站共视数据和主站共视数据进行两站时差处理获得从站与主站的时差t
a
‑
o
,t
a
‑
o
输出给时间控制模块,时间控制模块对时间驯服输出的1pps进行相位调整生成本地钟t
a
的1pps;
[0047]
所述固定网络节点间纳秒级时间同步方法的实现装置持续循环,以1s和16分钟两种时间策略运行,即北斗接收模块、时间驯服、时差测量以1s的周期运行,本站共视数据处理、两站时差处理和时间控制以16分钟的周期运行。在开机后至少2次本地钟t
a
的调整之后,能够达到从站与主站5ns的时间同步精度,之后循环运行可保持从站与主站的时间同步精度在5ns范围内。
[0048]
本发明的有益效果在于通过卫星共视方法与时间控制方法相结合,在卫星共视误差相关性较好的500公里距离范围内,实现从站与主站两个异地节点实时的高精度时间同步,从而实现整个固定网络的时间同步,精度可达5ns,设备组成简单、实用,适合外场环境下的工程应用。
[0049]
网络中每个节点的电子设备的信号发射时刻和接收时刻需要高度的时间一致性,使得信号和数据能够实现融合应用。本发明实现了网络节点中从站与主站的时间同步与跟随,从而使整个网络时间一致。解决了实际工程应用所需的实时性与实用性,在主站和从站配置设备形态相同的装置,在设备开机45min后,达到从站与主站纳秒级的时间同步精度。
附图说明
[0050]
图1是本发明的固定网络高精度时间同步装置连接示意图。
[0051]
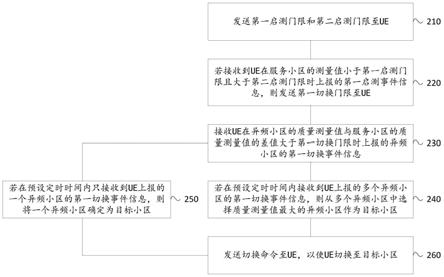
图2是本发明的固定网络高精度时间同步方法的流程图。
[0052]
图3是本发明的主从站本地钟时间同步效果图。
具体实施方式
[0053]
下面结合附图和实施例对本发明进一步说明。
[0054]
本发明所设计实现的固定网络时间同步装置,实现从站与主站之间高精度的时间同步和跟随,从而实现整个网络的时间同步,保证固定应用的多节点分布式电子信息系统对全网高精度时间同步的需求。固定网络时间同步装置的组成如图1所示。在主站和从站是相同的设备组成,区别在于主站仅发共视数据不做时间调整,从站仅收主站共视数据进行本地钟的调整。本发明提供的固定网络高精度时间同步的装置和方法,其特征在于利用卫星共视与相位级时间控制相结合的方法,在一个装置中实现异地节点时间同步的功能,首先建立具有驯服到卫星时间的本地钟基准,再利用卫星共视法估计从站与主站之间本地钟的时间差,然后利用相位级的时间控制方法调整从站时间,使之与主站时间同步,最终达到覆盖500公里范围内的全网时间同步,设备轻便实用便于工程应用。
[0055]
实施例如下:
[0056]
a)在时基模块上利用北斗接收模块输出的1pps信号进行时间驯服获得本地钟;
[0057]
在时基模块上利用北斗接收模块每秒一次提供的bd 1pps信号进行时间驯服处理,时间驯服采用数字频率控制锁相环,以1s一次的频率测得铷钟模块与外输入bd1pps的相位差值,剔除抖动大于
±
20ns的相位差值,进行长度为m的滑动平均,m取值范围为100
‑
200s,本发明m选取为100s;对滑动平均后的相位差值进行卡尔曼滤波,消除随机抖动,获得与bd 1pps同步的高稳定的1pps,经过时间控制模块调整得到本地钟t
a
,在开机时时间控制模块的首次调整量为零;
[0058]
b)在时基模块上测量北斗接收模块输出1pps和本地钟之间的时差;
[0059]
在时基模块上每秒一次测量北斗接收模块输出bd 1pps和本地钟t
a
之间的时差t
bd
‑
a
;
[0060]
c)在数据处理模块上实时采集北斗接收模块的测量数据;
[0061]
数据处理模块从北斗接收模块每秒一次获得bd 1pps输出时刻的bd观测数据,bd观测数据包括卫星、仰角、卫星方位角、伪距、电离层延迟、对流层延迟、卫星星历(或卫星位置)及卫星钟修正参数数据;
[0062]
d)在数据处理模块上计算本地钟与北斗系统时钟时差形成共视数据;
[0063]
以16分钟为一个周期,接收数据时间段为13分钟(780秒),处理数据时间段为3分钟(180秒);利用步骤c)获得的bd观测数据,按照公式(1)每秒一次计算bd1pps与卫星钟(即北斗系统时钟)的时差t
bd
‑
sv
;
[0064]
t
bd
‑
sv
=(pr
‑
r
‑
d
ion
‑
d
iro
)/c
‑
d
sv
ꢀꢀ
(1)
[0065]
其中,pr为卫星伪距,单位为米,r为本地距离卫星的真实距离,单位为m,采用已知的北斗卫星信号接收天线的精确位置和卫星位置计算得到,d
ion
为电离层延迟,单位为m,d
trop
为对流层延迟,单位为m,d
sv
为卫星钟误差,单位为s,c为光速;
[0066]
然后利用步骤b)获得的时差t
bd
‑
a
,利用公式(2)将t
bd
‑
sv
与t
bd
‑
a
相减:
[0067]
t
a
‑
sv
=t
bd
‑
sv
‑
t
bd
‑
a
ꢀꢀ
(2)
[0068]
计算得到本地钟t
a
与北斗系统时钟的时差t
a
‑
sv
;
[0069]
以每15秒为一个时段,共分为52段,对每15秒钟测得的t
a
‑
sv
数据用最小二乘法作二次曲线拟合,得到52个曲线中点值,分别再用最小二乘法对52个中点值作线性拟合,得到拟合后直线中点值为本地钟与bds系统时钟之间的偏差refbds,拟合后直线的斜率是srbds;
[0070]
针对所有仰角大于15
°
的可见星处理,每16分钟形成一组共视数据,共视数据包括:卫星号、refbds和srbds;
[0071]
主站和从站数据类型和计算方法相同。
[0072]
e)主站广播共视数据
[0073]
主站共视数据通过通信网络广播;
[0074]
f)从站接收主站共视数据,在数据处理模块上计算从站相对主站本地钟时差;
[0075]
从站接收主站共视数据,在数据处理模块上每16分钟计算一次从站与主站本地钟的时间差,选取主站和从站共视的卫星组对应的refbds,按照公式(3)对所有共视卫星的主站和从站的refbds进行求差后再平均:
[0076][0077]
其中,n为共视卫星总数,为从站本地钟与bds系统时钟之间的偏差,为主站本地钟与bds系统时钟之间的偏差;
[0078]
计算获得从站相对主站本地钟时差t
a
‑
o
;
[0079]
g)在时基模块上利用主从站本地钟时差数据调整从站本地钟相位;
[0080]
时基模块利用t
a
‑
o
对时间驯服模块输出的1pps进行相位调整得到本地钟t
a
,调整精度小于0.5ns;当从站设备开机后进入粗调整阶段,先剔除t
a
‑
o
超出
±
200ns的数值;依次检测每次t
a
‑
o
数值,当出现t
a
‑
o
绝对值小于等于10ns时,进入细调整阶段;在细调整阶段,剔除t
a
‑
o
超出
±
10ns的数值;
[0081]
h)以16分钟为周期不断重复步骤a)到步骤g),从站获得与主站高精度时间同步;
[0082]
设备开机后至少经过2次步骤g)的从站本地钟调整过程,之后持续获得从站本地钟与主站本地钟高精度同步。达到如图3所示的主从站本地钟时间同步效果。
[0083]
本发明还提供一种固定网络节点间纳秒级时间同步的装置,组成如图1所示。北斗接收模块通过天线接收北斗卫星信号,实现信号接收和导航数据解调,获得bd观测数据和bd 1pps;北斗接收模块将bd 1pps信号分两路输入时基模块,一路进入时间驯服模块用于时间驯服,铷钟模块输入的10mhz作为时间驯服数字频率控制锁相环的参考信号,经过时间驯服获得1pps和10mhz,时间驯服输出的1pps经过时间控制模块调整相位后成为本地钟t
a
的1pps,时间驯服输出的10mhz直接成为本地钟t
a
的10mhz;另外一路bd 1pps进入时差测量模块,用于测量bd 1pps与本地钟t
a
的1pps之间的时差t
bd
‑
a
,t
bd
‑
a
输出至数据处理模块;
[0084]
北斗接收模块输出bd观测数据至数据处理模块,bd观测数据包括卫星、仰角、卫星方位角、伪距、电离层延迟、对流层延迟、卫星星历(或卫星位置)及卫星钟修正参数数据;在
数据处理模块中进行本站共视数据处理,生成本站共视数据;用于主站的装置只输出共视数据,不做两站时差处理;用于从站的装置不输出共视数据,接收主站共视数据,利用从站共视数据和主站共视数据进行两站时差处理获得从站与主站的时差t
a
‑
o
,t
a
‑
o
输出给时间控制模块,时间控制模块对时间驯服输出的1pps进行相位调整生成本地钟t
a
的1pps;
[0085]
整个过程持续循环一直运行,整个装置以1s和16分钟两种时间策略运行,即北斗接收模块、时间驯服、时差测量以1s的周期运行,本站共视数据处理、两站时差处理和时间控制以16分钟的周期运行。在开机后至少2次本地钟t
a
的调整之后,能够达到从站与主站5ns的时间同步精度,之后循环运行可保持从站与主站的时间同步精度在5ns范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。