1.本主题总体上涉及包括齿轮组件的涡轮机,并且尤其涉及特定于某些涡轮机构造的齿轮组件布置。
2.致谢政府支持
3.导致该申请的项目已从clean sky 2joint undertaking(ju)根据拨款协议no 945541获得资金。ju获得了欧盟地平线2020研究与创新计划以及除欧盟之外的clean sky 2ju成员的支持。
背景技术:
4.涡轮风扇发动机的工作原理是,中央燃气涡轮核心驱动旁路风扇,该旁路风扇位于发动机机舱和发动机核心之间的径向位置处。通过这种构造,由于增加风扇的尺寸相应地增加了机舱的尺寸和重量,因此发动机通常受到旁路风扇的允许尺寸的限制。
5.相比之下,开放式转子发动机的工作原理是,使旁路风扇位于发动机机舱的外部。与传统的涡轮风扇发动机相比,这允许使用能够作用于更大空气量的更大的转子叶片,与传统的涡轮风扇发动机设计相比,潜在地提高了推进效率。
6.涡轮机的发动机设计,包括涡轮风扇和开放式转子发动机,可能需要低速线轴和风扇转子之间的大齿轮比,以允许较大的转子叶片作用于较大的空气量和/或在发动机或飞行器的某些期望操作速度下这样做。一个挑战是已知的齿轮组件可能无法为期望操作提供足够的齿轮比。例如,已知的齿轮组件可能不足以相对于输入转速降低输出转速,使得风扇转子操作得太快且效率低下和/或涡轮操作得太慢且效率低下。
7.这样,需要提供可以适合于某些涡轮机构造的期望齿轮比的齿轮组件。
技术实现要素:
8.本发明的方面和优点将在下面的描述中部分地阐述,或者可以从描述中变得显而易见,或者可以通过实践在描述中公开的技术来获知。
9.本文公开了各种涡轮机发动机和齿轮组件。在一些实施例中,提供了一种涡轮机发动机,该涡轮机发动机包括风扇组件和核心发动机,该核心发动机包括涡轮和可与涡轮一起旋转的输入轴。单级周转齿轮组件以第一速度接收输入轴,并以第二速度驱动联接至风扇组件的输出轴,第二速度比第一速度慢。齿轮组件包括太阳齿轮,多个行星齿轮和环形齿轮。太阳齿轮绕齿轮组件的纵向中心线旋转,并且具有沿着齿轮组件的纵向中心线的太阳齿轮啮合区域,太阳齿轮被构造成在太阳齿轮啮合区域接触多个行星齿轮。环形齿轮啮合区域沿着齿轮组件的纵向中心线设置,环形齿轮被构造成在环形齿轮啮合区域接触多个行星齿轮。太阳齿轮啮合区域沿着轴向中心线与环形齿轮啮合区域轴向偏移。
10.参考以下描述和所附权利要求,将更好地理解本公开的这些和其他特征,方面和优点。结合在本说明书中并构成本说明书的一部分的附图示出了所公开技术的实施例,并
且与说明书一起用于解释本公开的原理。
附图说明
11.在说明书中阐述了针对本领域普通技术人员的本发明的完整而可行的公开,其参考附图,其中:
12.图1是开放式转子推进系统的示例性实施例的横截面示意图;
13.图2是开放式转子推进系统的示例性实施例的横截面示意图;
14.图3是用于开放式转子推进系统的示例性轮叶组件的替代实施例的图示;
15.图4是具有轴向偏移齿轮啮合区域的示例性齿轮组件的示意图;
16.图5是具有轴向偏移齿轮啮合区域的示例性齿轮组件的示意图;
17.图6a和6b是具有三个行星齿轮的齿轮组件的示意图;
18.图7a和7b是具有两个行星齿轮的齿轮组件的示意图;
19.图8是具有轴向偏移齿轮啮合区域的示例性齿轮组件的示意图;
20.图9是具有轴向偏移齿轮啮合区域的示例性齿轮组件的示意图;
21.图10是具有没有重叠的轴向偏移齿轮啮合区域的示例性齿轮组件的示意图;
22.图11是具有有重叠的轴向偏移齿轮啮合区域的示例性齿轮组件的示意图;和
23.图12是管道式推进系统的示例性实施例的横截面示意图。
具体实施方式
24.现在将详细参考本发明的实施例,其一个或多个示例在附图中示出。通过解释本发明而不是限制本发明来提供每个示例。实际上,对于本领域技术人员将显而易见的是,在不脱离本发明的范围或精神的情况下,可以对本发明进行各种修改和变型。例如,作为一个实施例的一部分示出或描述的特征可以与另一实施例一起使用以产生又一实施例。因此,本发明旨在覆盖落入所附权利要求及其等同物的范围内的这种修改和变型。
25.词语“示例性”在本文中用来表示“用作示例,实例或说明”。本文中被描述为“示例性”的任何实施方式不必被解释为比其他实施方式优选或有利。
26.如本文所使用的,术语“第一”,“第二”和“第三”可以互换使用以将一个部件与另一个部件区分开,并且不旨在表示各个部件的位置或重要性。
27.术语“向前”和“向后”是指燃气涡轮发动机或运载器内的相对位置,并且是指燃气涡轮发动机或运载器的正常操作姿态。例如,对于燃气涡轮发动机,向前是指更靠近发动机入口的位置,而向后是指更靠近发动机喷嘴或排气口的位置。
28.术语“上游”和“下游”是指相对于流体路径中的流体流动的相对方向。例如,“上游”是指流体从其流动的方向,而“下游”是指流体向其流动的方向。
29.除非另有说明,否则术语“联接”,“固定”,“附接到”等是指直接联接,固定或附接,以及通过一个或多个中间部件或特征的间接联接,固定或附接。
30.除非上下文另外明确指出,否则单数形式“一”,“一种”和“该”包括复数引用。
31.如本文在整个说明书和权利要求书中所使用的,近似语言被用于修饰可以允许变化而不会导致与其相关的基本功能发生变化的任何定量表示。因此,由诸如“约”,“大约”和“基本上”的术语修饰的值不限于所指定的精确值。在至少一些情况下,近似语言可以对应
于用于测量值的仪器的精度,或用于构造或制造部件和/或系统的方法或机器的精度。例如,近似语言可以指在单个值,值范围和/或限定值范围的端点的1%,2%,4%,10%,15%或20%的裕度之内。
32.在这里以及整个说明书和权利要求书中,范围限制被组合和互换,除非上下文或语言另有指示,否则这种范围被识别并且包括其中包含的所有子范围。例如,本文公开的所有范围包括端点,并且端点可彼此独立地组合。
33.下文描述的涡轮机发动机或齿轮组件的一个或多个部件可以使用任何适当的处理(诸如增材制造处理,诸如3d打印处理)来制造或形成。使用这样的处理可以使这样的部件整体地形成为单个整体部件,或任何合适数量的子部件。特别地,增材制造处理可以允许这样的部件整体地形成,并且包括当使用现有的制造方法时不可能实现的各种特征。例如,本文描述的增材制造方法使得能够制造具有独特特征,构造,厚度,材料,密度,流体通道,集管和安装结构的热交换器,而这些独特特征,构造,厚度,材料,密度,流体通道,集管和安装结构使用现有的制造方法可能是不可能的或不实际的。这些特征中的一些在本文中描述。
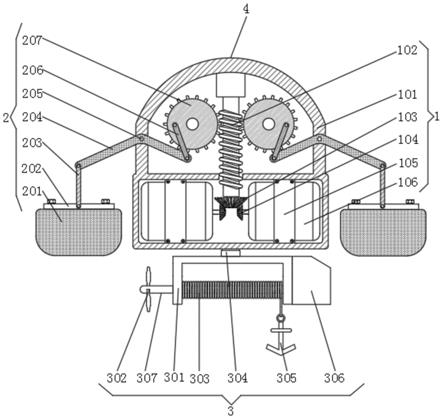
34.现在参考附图,图1是根据本公开的方面的包括齿轮组件102的发动机100的示例性实施例。发动机100包括由核心发动机106驱动的风扇组件104。在各个实施例中,核心发动机106是被构造成驱动风扇组件104的布雷顿循环系统。核心发动机106至少部分地被外壳114罩住。风扇组件104包括多个风扇叶片108。轮叶组件110从外壳114延伸。包括多个轮叶112的轮叶组件110与风扇叶片108以可操作的布置定位,以相对于风扇叶片108提供推力,控制推力矢量,减弱或重定向不期望的声学噪声,和/或以其他方式期望地改变气流。在一些实施例中,风扇组件104包括三(3)个至二十(20)个之间的风扇叶片108。在特定实施例中,风扇组件104包括十(10)个至十六(16)个之间的风扇叶片108。在某些实施例中,风扇组件104包括十二(12)个风扇叶片108。在某些实施例中,轮叶组件110包括与风扇叶片108相等或更少数量的轮叶112。
35.在一些实施例中,风扇叶片末端速度在巡航飞行条件下可以达到650至900fps,或700至800fps。如在巡航飞行条件下跨风扇叶片所测量的,风扇组件104的风扇压力比(fpr)可以是1.04至1.10,或者在一些实施例中是1.05至1.08。在一些实施例中,由齿轮组件提供的输出扭矩可以在20knm至200knm的范围内,或者在其他实施例中在40knm至150knm的范围内。
36.在某些实施例中,例如图1所示,轮叶组件110定位在风扇组件104的下游或后方。然而,应当理解,在一些实施例中,轮叶组件110可以定位在风扇组件104的上游或前方。仍在各个实施例中,发动机100可包括定位在风扇组件104前方的第一轮叶组件和定位在风扇组件104后方的第二轮叶组件。风扇组件104可以被构造成期望地调节一个或多个风扇叶片108处的螺距(pitch),例如以控制推力矢量,减弱或重定向噪声,和/或改变推力输出。轮叶组件110可以被构造成期望地调节一个或多个轮叶112处的螺距,例如以控制推力矢量,减弱或重定向噪声,和/或改变推力输出。风扇组件104或轮叶组件110中的一个或两者处的螺距控制机构可以协作以产生上述一种或多种期望的效果。
37.在某些实施例中,例如图1中所示,发动机100是非管道式推力产生系统,使得多个风扇叶片108未被机舱或风扇壳体罩住。这样,在各种实施例中,发动机100可以被构造成非
罩式涡轮风扇发动机,开放式转子发动机或桨扇发动机。在特定实施例中,发动机100是包括单排风扇叶片108的单个非管道式转子发动机。被构造成开放式转子发动机的发动机100包括具有大直径风扇叶片108的风扇组件104,例如可以适用于高旁路比,高巡航速度(例如,与具有涡轮风扇发动机的飞行器相比拟,或者通常比具有涡轮螺旋桨发动机的飞行器更高的巡航速度),高巡航高度(例如,与具有涡轮风扇发动机的飞行器相比拟,或者通常比具有涡轮螺旋桨发动机的飞行器更高的巡航速度)和/或相对低转速。巡航高度通常是指飞行器在爬升之后并且在下降到进近飞行阶段之前所处的水平高度。在各种实施例中,发动机被应用于巡航高度高达大约65,000ft的运载器。在某些实施例中,巡航高度在大约28,000ft至大约45,000ft之间。仍在某些实施例中,巡航高度基于海平面上的标准气压以飞行水平面(flight level,fl)表示,其中巡航飞行条件在fl280至fl650之间。在另一个实施例中,巡航飞行条件在fl280至fl450之间。仍在某些实施例中,至少基于大气压力来限定巡航高度,其中基于大约14.70psia的海平面压力和大约59华氏度的海平面温度,巡航高度在大约4.85psia至大约0.82psia之间。在另一个实施例中,巡航高度在大约4.85psia至大约2.14psia之间。应当理解,在某些实施例中,可以基于不同的参考海平面压力和/或海平面温度来调节由压力限定的巡航高度的范围。
38.核心发动机106通常被封装在限定最大直径的外壳114中。在某些实施例中,发动机100包括从纵向前端116到纵向后端118的长度。在各种实施例中,发动机100限定了长度(l)与最大直径(d
max
)的比,以提供减小的安装阻力。在一个实施例中,l/d
max
为至少2。在另一个实施例中,l/d
max
为至少2.5。在一些实施例中,l/d
max
小于5,小于4且小于3。在各种实施例中,应当理解,l/d
max
用于单个非管道式转子发动机。
39.减小的安装阻力可以进一步提供改善的效率,例如改善的比燃料消耗。附加地或替代地,减小的阻力可以提供0.5马赫或以上的巡航高度发动机和飞行器操作。在某些实施例中,l/d
max
,风扇组件104和/或轮叶组件110分别或一起至少部分地构造发动机100,以在大约0.55马赫至大约0.85马赫之间的最大巡航高度操作速度下操作。
40.再次参考图1,核心发动机106相对于发动机轴线中心线120在径向方向r上延伸。齿轮组件102通过动力输入源122从核心发动机106接收动力或扭矩,并通过动力输出源124在围绕发动机轴线中心线120的周向方向c上提供动力或扭矩来驱动风扇组件104。
41.图2示出了开放式转子推进发动机100的示例性实施例的正视横截面视图。发动机100具有风扇组件104,风扇组件104包括围绕发动机100的中央纵向轴线120的多个风扇叶片108。风扇叶片108围绕中心线120以相等间隔周向布置,并且每个风扇叶片108具有根部125,末端126,在它们之间限定的轴向跨度以及中心叶片轴线128。
42.核心发动机16包括一起以串行流动布置的压缩机区段130,热量添加系统132(例如,燃烧器)和扩展区段134。核心发动机106相对于发动机中心线轴线120周向延伸。核心发动机106包括高速线轴,该高速线轴包括通过高速轴140可操作地可旋转地联接在一起的高速压缩机136和高速涡轮138。热量添加系统132定位在高速压缩机136和高速涡轮138之间。热量添加系统132的各种实施例包括燃烧区段。燃烧区段可以被构造成爆燃燃烧区段,旋转爆震燃烧区段,脉冲爆震燃烧区段或其他合适的热量添加系统。热量添加系统132可以被构造成富燃系统或稀燃系统,或其组合中的一种或多种。仍在各种实施例中,热量添加系统132包括环形燃烧器,罐式燃烧器,套管式燃烧器,捕集涡流式燃烧器(tvc)或其他合适的燃
烧系统或其组合。
43.核心发动机106还包括增压器或低速压缩机,其与高速压缩机136以流动关系定位。低速压缩机142经由低速轴146与低速涡轮144可旋转地联接,以使低速涡轮144能够驱动低速压缩机142。低速轴146也可操作地连接至齿轮组件102以向风扇组件104提供动力,如本文进一步所述。
44.应当理解,除非另有说明,否则在与压缩机,涡轮,轴或线轴部件一起使用时,术语“低”和“高”,或它们各自的比较级(例如,更低、更高,如果适用)均指发动机内的相对速度。例如,“低涡轮”或“低速涡轮”限定被构造成以低于发动机的“高涡轮”或“高速涡轮机”的转速(例如最大允许转速)操作的部件。替代地,除非另有说明,否则可以以其最高级来理解前述术语。例如,“低涡轮”或“低速涡轮”可以指涡轮区段内的最低的最大转速涡轮,“低压缩机”或“低速压缩机”可以指压缩机区段内的最低的最大转速涡轮,“高涡轮”或“高速涡轮”可以指涡轮区段内的最高的最大转速涡轮,并且“高压缩机”或“高速压缩机”可以指压缩机区段内的最高的最大转速压缩机。类似地,低速线轴是指比高速线轴低的最大转速。还应当理解,在上述方面中的术语“低”或“高”可以附加地或替代地理解为相对于最小允许速度,或相对于发动机的正常,期望,稳定状态等操作的最小或最大允许速度。
45.如下面更详细地讨论的,核心发动机106包括齿轮组件102,该齿轮组件102被构造成传递来自扩展区段140的动力,并相对于低速涡轮144减小风扇组件104处的输出转速。本文所描绘和描述的齿轮组件104的实施例可以允许适合于大直径非管道式风扇的齿轮比。另外,本文提供的齿轮组件102的实施例可以在外壳114内的核心发动机106的径向或直径约束内是合适的。
46.在图2的示例性实施例中,发动机100还包括轮叶组件110,该轮叶组件110包括围绕中心轴线120设置的多个轮叶112。每个轮叶112具有根部148和末端150,以及在它们之间限定的跨度。轮叶112可以以各种方式布置。例如,在一些实施例中,它们与旋转组件并非全部等距。
47.在一些实施例中,轮叶112被安装到固定框架并且不相对于中心轴线120旋转,但是可以包括用于调节它们相对于其轴线154和/或相对于叶片108的取向的机构。出于参考目的,图2描绘了用箭头f表示的向前方向,这进而限定了系统的向前和向后部分。如图1和图2所示,风扇组件104可以以“拉式(puller)”构造位于燃气核心发动机106的前方,而排气口156位于核心发动机106的后方。
48.可通过镜像翼型件(例如108、112)使得风扇组件104对于一个推进系统顺时针旋转,而对于另一推进系统逆时针旋转来实现左旋或右旋发动机构造,该构造在减少多发动机扭矩对飞行器的影响方面对于某些设施很有用。替代地,可以提供可选的换向齿轮箱,以允许使用公共燃气涡轮核心和低压涡轮来使风扇叶片顺时针或逆时针旋转,即根据需要提供左旋或右旋构造,例如,可以为某些飞行器设施提供一对反向旋转的发动机组件,而无需具有为反向旋转方向设计的内部发动机零件。
49.发动机100还包括齿轮组件102,该齿轮组件102包括齿轮组,用于减小风扇组件104相对于低速(压力)涡轮144的转速。在操作中,旋转风扇叶片108由低速(压力)涡轮144经由齿轮组件102驱动,使得风扇叶片108绕轴线120旋转并产生推力以推进发动机100,从而在向前方向f上推进其上安装有发动机100的飞行器。
50.可能期望的是,风扇叶片104或轮叶112中的一个或两个都包括变桨机构,使得叶片可以相对于螺距旋转轴线(分别标注为128或154)独立或彼此结合地旋转。这种螺距变化可用于在各种操作条件下改变推力和/或涡流效应,包括提供推力反向特征,其在某些操作条件下(例如在飞行器降落时)可能是有用的。
51.轮叶112可以被尺寸设计为,成形为和构造成赋予流体抵消(counteracting)涡流,从而在风扇叶片104和轮叶112后方的下游方向上流体的涡流度大大降低,这转化为提高的诱导效率水平。如图1和图2所示,轮叶112可以具有比风扇叶片104更短的跨度。例如,轮叶112的跨度至少是风扇叶片104的跨度的50%。在一些实施例中,如果需要,轮叶的跨度可以与风扇叶片104的跨度相同或更长。如图1所示,轮叶112可以附接到与发动机100相关联的飞行器结构,或者诸如机翼,吊架或机身的另一飞行器结构。轮叶112的数量可以小于,大于或等于风扇叶片104的数量。在一些实施例中,轮叶112的数量大于两个或大于四个。风扇叶片104可以被尺寸设计为,成形为和轮廓设计为考虑期望的叶片负载。
52.在图2所示的实施例中,环形360度入口158位于风扇组件104和轮叶组件110之间,并为进入的大气从轮叶组件110的至少一部分径向向内进入发动机核心106提供路径。这样的位置对于各种原因(包括管理结冰性能以及保护入口158不受操作中可能遇到的各种物体和材料的影响)可能是有利的。
53.图1和图2示出了所谓的“拉式”构造,其中风扇组件104位于发动机核心106的前方。其他构造也是可能的并且被构想为在本公开的范围内,诸如发动机核心106位于风扇组件104前方的所谓的“推式”构造实施例。
[0054]“拉式”或“推式”构造的选择可以与相对于预期飞行器应用的机身的安装取向的选择相一致地进行,并且取决于安装位置和取向是机翼安装,机身安装还是尾部安装构造,一些选择在结构上或操作上可能是有利的。
[0055]
在图2的示例性实施例中,除了具有多个风扇叶片104的开放式转子或非管道式风扇组件104之外,在风扇组件104的后面还包括可选的管道式风扇160,使得发动机100包括管道式风扇和非管道式风扇,两者均用于通过大气温度下的空气移动而无需穿过发动机核心106来产生推力。示出的管道式风扇160在与轮叶112大约相同的轴向位置处,并且在轮叶根部148的径向内侧。替代地,管道式风扇160可以在轮叶112和核心管道162之间,或者在轮叶112的更前方。管道式风扇160可以由低压涡轮或由任何其他合适的旋转源驱动,并且可以用作增压器142的第一级或可以单独地操作。进入入口158的空气流过入口管道164,然后被分开,使得一部分流过核心管道162,一部分流过风扇管道166。风扇管道166可结合有热交换器168,并且通过轮叶组件110后方的独立固定或可变喷嘴170排气到大气中,喷嘴170在风扇罩152后端和发动机核心罩172外侧。因此,流过风扇管道166的空气“绕过”发动机的核心,而不穿过核心。
[0056]
因此,在示例性实施例中,发动机100包括由风扇叶片108形成的非管道式风扇,其后是管道式风扇160,该管道式风扇160将气流引导到两个同心或非同心管道162和166中,从而形成具有用于穿过风扇组件104的空气的3条路径的三流发动机架构。
[0057]
在图2所示的示例性实施例中,可以包括具有致动器的可滑动,可移动和/或可平移的塞式喷嘴172,以便改变喷嘴170的出口面积。塞式喷嘴通常是环形的对称装置,其通过喷嘴的轴向移动来调节出口(例如风扇流或核心流)的开口面积,使得喷嘴表面和固定结构
(例如管道的相邻壁)之间的间隙以预定的方式变化,从而减少或增加气流通过管道的空间。也可以采用其他合适的喷嘴设计,包括结合推力反向功能的那些喷嘴设计。这种可调节,可移动的喷嘴可以设计成与其他系统(例如vbv,vsv或叶片变桨机构)协同操作,并且可以设计成具有故障模式(例如全开,全关或中间位置),以便喷嘴170具有在任何系统故障的情况下返回的一致“原始”位置,这可能防止命令到达喷嘴170和/或其致动器。
[0058]
在一些实施例中,混合装置174可以被包括在核心喷嘴176的后方的区域中,以帮助将风扇流和核心流混合,以通过将核心流向外引导并且将风扇流向内引导来改善声学性能。
[0059]
由于图2所示的发动机100包括开放式转子风扇组件104和管道式风扇组件160,因此两者的推力输出以及它们之间的功分配可以被定制,以实现特定的推力,燃料燃烧,热管理和/或声学特征目标,这些特定的推力,燃料燃烧,热管理和/或声学特征目标可优于可比推力级别的典型管道式风扇燃气涡轮推进组件的推力,燃料燃烧,热管理和/或声学特征目标。通过减小需要由非管道式风扇组件104提供的推力的比例,管道式风扇组件160可允许减小非管道式风扇组件的总风扇直径,从而提供安装灵活性和减轻的重量。
[0060]
在操作上,发动机100可以包括控制系统,该控制系统管理相应的开放式和管道式风扇的负载,以及潜在地,可变风扇喷嘴的出口面积,以为飞行包线的各个部分和与飞行器操作相关联的各种操作条件提供不同的推力,噪声,冷却能力和其他性能特性。例如,在爬升模式下,管道式风扇可在最大压力比下操作,从而使流的推力能力最大化,而在巡航模式下,管道式风扇可在较低的压力比下操作,通过依赖来自非管道式风扇的推力来提高整体效率。喷嘴致动可调节管道式风扇的操作管线和总的发动机风扇压力比,而与总的发动机气流无关。
[0061]
流过风扇管道166的管道式风扇流可包括一个或多个热交换器168,用于从发动机操作中使用的各种流体(例如空气冷却的油冷却器(acoc),冷却的冷却空气(cca)等)中去除热量。与传统的管道式风扇架构相比,热交换器168可以利用与风扇管道166集成的优势,从而具有减少的性能损失(例如燃料效率和推力),这是因为不影响主要的推力源,在这种情况下,主要的推力源是非管道式风扇流。热交换器可以冷却流体,例如齿轮箱油,发动机油底壳油,热传输流体(例如超临界流体)或市售的单相或两相流体(超临界co2,egv,slither 800,液态金属等),发动机引气等。热交换器也可以由冷却不同工作流体的不同段或通道(例如与燃料冷却器配对的acoc)组成。热交换器168可以结合到热管理系统中,该热管理系统经由流过网络的热交换流体提供热传递,以从源去除热量并将热量传递到热交换器。
[0062]
由于管道式风扇的风扇压力比高于非管道式风扇的风扇压力比,因此风扇管道提供了一种环境,在该环境中,与安装在非管道式风扇流中的核心罩的外部相比,可以利用更紧凑的热交换器。风扇旁路空气的风扇压力比(fpr)非常低(1.05至1.08),因此很难通过热交换器驱动空气。在没有如本文所述的风扇管道的情况下,可能需要勺或增压器引气以向热交换器提供冷却空气并通过热交换器。可以基于热负荷,热交换器尺寸,管道式风扇流校正流和管道式风扇流温度,在风扇管道中围绕热交换器制定一组参数。
[0063]
风扇管道166在减小的机舱阻力方面还提供了其他优点,从而能够实现更积极的机舱关闭,改进的核心流颗粒分离以及恶劣天气操作。通过在核心罩上排放风扇管道流,这
有助于激励边界层,并能够实现核心罩172的最大尺寸和排气口156之间的更陡机舱关闭角度的选择。关闭角度通常受气流分离的限制,但是通过来自风扇管道166的空气在核心罩上排放的边界层激励会减少气流分离。这产生了具有更小摩擦表面阻力的更短,更轻的结构。
[0064]
风扇组件104和/或轮叶组件可以是罩式或非罩式(如图1和2所示)。图3示出了位于轴线120的远端的轮叶组件110上的可选环形护罩或管道178。除了降低噪声的好处外,图3所示的管道178还可以通过将固定轮叶112联接到形成环形圈或一个或多个周向扇形(sector)的组件(即形成链接两个或更多个轮叶112的环形圈的部分的段)中,来提供固定轮叶112的改进的振动响应和结构完整性。管道178还可以允许轮叶的螺距更容易地改变。下面将更详细讨论的图12公开了另一实施例,其中风扇组件和轮叶组件都被罩住。
[0065]
本文描绘和描述的齿轮组件102的实施例可以提供适合发动机10的l/d
max
约束内的齿轮比和布置。在某些实施例中,关于图4
‑
11描绘和描述的齿轮组件允许提供对应于以上提供的巡航高度和/或巡航速度的一个或多个范围的风扇组件的转速的齿轮比和布置。
[0066]
本文提供的齿轮组件102的各种实施例可允许高达14:1的齿轮比。本文提供的齿轮组件102的还有的各种实施例可允许至少6∶1的齿轮比。对于单级周转齿轮组件,本文提供的齿轮组件102的仍还有的各种实施例允许在6∶1至12∶1之间的齿轮比。应当理解,本文提供的齿轮组件102的实施例可以允许大齿轮比并且在约束(例如但不限于,发动机10的长度(l),发动机100的最大直径(d
max
),高达65,000ft的巡航高度,和/或高达0.85马赫的操作巡航速度,或其组合)内。
[0067]
本文示出并描述了各种示例性齿轮组件。这些齿轮组件可以与任何示例性发动机和/或可能需要这种齿轮组件的任何其他合适的发动机一起使用。以这种方式,将理解,本文公开的齿轮组件通常可与发动机和涡轮机一起操作,该发动机具有带有多个转子叶片的旋转元件,该涡轮机具有涡轮和可与涡轮一起旋转的轴。对于这种发动机,旋转元件(例如,风扇组件104)可以由涡轮机的轴(例如,低速轴146)通过齿轮组件来驱动。
[0068]
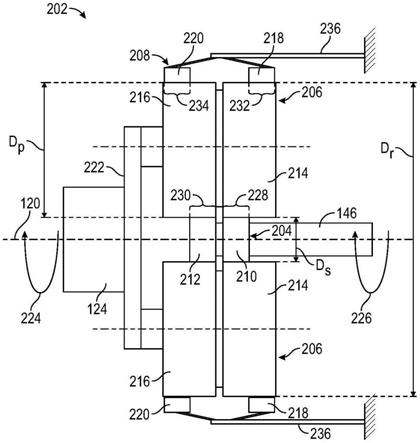
图4示出了具有轴向偏移面宽度的示例性齿轮组件202。齿轮组件202包括直径为d
s
的太阳齿轮204,直径为d
p
的多个行星齿轮206以及直径为d
r
的环形齿轮208。太阳齿轮204,行星齿轮206和环形齿轮208中的每一个都是具有第一组斜齿和第二组斜齿的双斜齿轮(double helical gear),该第一组斜齿和第二组斜齿相对于彼此以锐角倾斜。特别地,太阳齿轮204包括第一太阳齿轮组210和第二太阳齿轮组212。每个行星齿轮206包括第一行星齿轮组214和第二行星齿轮组216。环形齿轮208包括第一环形齿轮组218和第二环形齿轮组220。
[0069]
如下面更详细地讨论的,行星齿轮的数量可以变化。在一个实施例中,存在三个行星齿轮206。在另一实施例中,存在两个行星齿轮206。
[0070]
在图4所示的实施例中,齿轮组件202是行星齿轮构造,其中,环形齿轮208通过支撑结构236大体上固定(例如,静态)在发动机内。太阳齿轮204由输入轴(即,低速轴146)驱动。行星齿轮架222可旋转地联接到多个行星齿轮206,并且行星齿轮架222被构造成绕纵向中心线120在周向方向224上旋转,这继而驱动动力输出源124(例如,风扇轴),该动力输出源124联接到行星齿轮架222并且被构造成与其一起旋转以驱动风扇组件。在该实施例中,低速轴146在与风扇轴124旋转的方向224相同的周向方向226上旋转。
[0071]
如图4所示,太阳齿轮204在第一接触区域(即,太阳齿轮啮合区域)228、230与行星
齿轮206啮合,并且环形齿轮208在第二接触区域232、234(即,环形齿轮啮合区域)与行星齿轮206啮合。第一接触区域228、230与第一接触区域232、234轴向偏移,使得太阳齿轮的齿轮齿相对于纵向轴线120不与环形齿轮的齿轮齿轴向对准。
[0072]
再次参考图4,第一环形齿轮组218和第二环形齿轮组220彼此轴向间隔开,并且第一太阳齿轮组210和第二太阳齿轮组212定位在第一环形齿轮组218和第二环形齿轮组220之间。如下面更详细地讨论的,第一接触区域可以与第二接触区域不重叠,或者可以存在相对少量的重叠。因此,在该实施例中,环形齿轮208以向外偏移与行星齿轮206啮合,并且太阳齿轮204以向内偏移与行星齿轮206啮合。
[0073]
太阳齿轮和环形齿轮可轴向偏移,使得太阳齿轮啮合区域的宽度的至少50%不与环形齿轮啮合区域轴向重叠。在其他实施例中,轴向偏移可以使得太阳齿轮啮合区域的宽度的至少25%不与环形齿轮啮合区域轴向重叠。取决于偏移量,本文所述的第一和第二接触区域的轴向偏移可以减小和/或消除行星齿的反向弯曲。也就是说,由于本文所述的轴向偏移,一些或所有行星齿不与太阳齿轮和环形齿轮交替啮合,这使齿由于负载反向而承受反向弯曲应力。相对于设计用于解决反向弯曲限制的传统单级周转齿轮组件,这种布置提供的轴向偏移可提供具有更高齿轮比的齿轮组件。
[0074]
通过减小和/或消除一些或全部行星齿轮齿上的反向弯曲应力,可以减小太阳齿轮齿的面宽度,这又可以减小太阳齿轮的直径。因为齿轮比与环形齿轮和太阳齿轮的相对直径有关,所以在维持环形齿轮的直径的同时减小太阳齿轮的直径会导致齿轮比相应增加。
[0075]
在一些实施例中,本文所述的轴向偏移可在维持相同直径的环形齿轮的同时,使太阳齿轮的直径减小大约0.6至0.8。因此,例如,对于具有带有三个行星齿轮的行星齿轮构造的齿轮组件,太阳齿轮直径减小0.7可将齿轮比从6:1增加到8.2:1,或将齿轮比从6.5:1增加到8.8:1。这允许具有行星齿轮构造的单级齿轮组件实现大于或等于6:1的齿轮比,并且在一些实施例中,齿轮比大于或等于6.6:1,大于或等于7:1,或大于或等于8:1。在其他实施例中,上述齿轮组件的上限范围可以为14:1,或者在某些情况下上限范围为12:1。
[0076]
图5示出了具有轴向偏移面宽度的示例性齿轮组件302。齿轮组件302包括直径为d
s
的太阳齿轮304,直径为d
p
的多个行星齿轮306以及直径为d
r
的环形齿轮308。太阳齿轮304,行星齿轮306和环形齿轮308中的每一个都是具有第一组斜齿和第二组斜齿的双斜齿轮,该第一组斜齿和第二组斜齿相对于彼此以锐角倾斜。
[0077]
双斜太阳齿轮304包括第一太阳齿轮组310和第二太阳齿轮组312。每个双斜行星齿轮306包括第一行星齿轮组314和第二行星齿轮组316。双斜环形齿轮308包括第一环形齿轮组318和第二环形齿轮组320。在一些实施例中,齿轮组件中有两个或三个行星齿轮。
[0078]
在图5所示的实施例中,齿轮组件具有星形齿轮构造,其中行星架322通过支撑结构336固定(例如,静态)在发动机内。太阳齿轮304由输入轴(即,低速轴146)驱动。环形齿轮308被构造成在与低速轴146的旋转方向326相对的方向324上旋转,以驱动动力输出源124(例如,风扇轴)和风扇组件104。
[0079]
以与图4相似的方式,太阳齿轮304在第一接触区域328、330与行星齿轮306啮合,并且环形齿轮308在第二接触区域332、334与行星齿轮306啮合,并且第一接触区域328、330与第二接触区域332、334轴向偏移。如上所述,相对于解决反向弯曲应力所需的常规单级周
转齿轮组件,由这种布置提供的轴向偏移可以提供具有更高齿轮比的齿轮组件。
[0080]
如上所述,取决于偏移量,第一和第二接触区域的轴向偏移大大减小和/或消除了行星齿的反向弯曲,这继而允许具有较小直径的太阳齿轮和具有高齿轮比的齿轮组件。例如,对于具有带有三个行星齿轮的星形齿轮构造的齿轮组件,将太阳齿轮的直径减小0.7可以使齿轮比从5:1增加到7.2:1,并且可以将齿轮比从5.5:1增加到7.8:1。这允许具有星形齿轮构造的单级齿轮组件(如具有行星齿轮构造的单级齿轮组件)实现齿轮比大于或等于6:1,并且在一些实施例中,大于或等于6.6:1,大于或等于7:1,并且在一些实施例中,大于或等于8:1。在其他实施例中,上述齿轮组件的上限范围可以为14:1,或者在某些情况下上限范围为12:1。
[0081]
图6a,6b,7a和7b是图4和5所示类型的示例性齿轮组件的示意图。为了清楚起见,省略了图6a
‑
7b所示的一些齿轮组件的结构(例如,行星架,支撑结构)。尽管应当理解,图6a和6b所示的齿轮组件可以与行星齿轮构造(图4)或星形齿轮构造(图5)一起使用,但是为了方便起见,图6a
‑
7b使用与图4中为行星齿轮构造提供的相同的标号。
[0082]
图6a和6b示出了具有三个行星齿轮206的齿轮组件,而图7a和7b示出了具有两个行星齿轮206的齿轮组件。图6b和图7b分别示出了图6a和图7a的齿轮组件,为清楚起见,去除了双斜齿轮的齿轮组中的一个。如这些图所示,太阳齿轮和行星齿轮配合的接触区域与环形齿轮和行星齿轮配合的接触区域轴向偏移,以避免和/或减少反向弯曲应力对行星齿轮齿的影响。
[0083]
图8示出了具有轴向偏移面宽度的另一示例性齿轮组件402。图8具有行星齿轮构造,并且类似于图4中所示的齿轮组件202;然而,在该实施例中,环形齿轮以向内偏移与行星齿轮啮合,并且太阳齿轮以向外偏移与行星齿轮啮合。
[0084]
参考图8,齿轮组件402包括直径为d
s
的太阳齿轮404,直径为d
p
的多个行星齿轮406以及直径为d
r
的环形齿轮408。太阳齿轮404,行星齿轮406和环形齿轮408中的每一个都是具有第一组斜齿和第二组斜齿的双斜齿轮,该第一组斜齿和第二组斜齿相对于彼此以锐角倾斜。太阳齿轮404包括第一太阳齿轮组410和第二太阳齿轮组412,行星齿轮406包括第一行星齿轮组414和第二行星齿轮组416,并且环形齿轮408包括第一环形齿轮组418和第二环形齿轮组420。行星齿轮的数量可以如本文其他地方所描述的那样变化。
[0085]
图8所示的实施例以与以上关于图4所述相同的方式操作,但是具有不同的轴向偏移布置。如图8所示,太阳齿轮404在第一接触区域428、430与行星齿轮406啮合,并且环形齿轮408在第二接触区域432、434与行星齿轮406啮合,并且第一接触区域428、430与第二接触区域432、434轴向偏移。通过这种布置提供的轴向偏移可以提供具有更高齿轮比的齿轮组件。
[0086]
如在图4的实施例中,取决于偏移量,本文描述的第一和第二接触区域的轴向偏移大大减小和/或消除了行星齿的反向弯曲,并如上所述,相对于常规单级齿轮组件,提供减小太阳齿轮直径并增大齿轮比。
[0087]
图9示出了具有轴向偏移面宽度的示例性齿轮组件502。图9是类似于图5中所示的齿轮组件302的星形齿轮构造;然而,在该实施例中,环形齿轮以向内偏移与行星齿轮啮合,并且太阳齿轮以向外偏移与行星齿轮啮合。
[0088]
齿轮组件502包括直径为d
s
的太阳齿轮504,直径为d
p
的多个行星齿轮506以及直径
为d
r
的环形齿轮508。太阳齿轮504,行星齿轮506和环形齿轮508中的每一个都是具有第一组斜齿和第二组斜齿的双斜齿轮,该第一组斜齿和第二组斜齿相对于彼此以锐角倾斜。特别地,太阳齿轮504包括第一太阳齿轮组510和第二太阳齿轮组512。每个行星齿轮506包括第一行星齿轮组514和第二行星齿轮组516。环形齿轮508包括第一环形齿轮组518和第二环形齿轮组520。行星齿轮的数量可以是两个或三个。
[0089]
在该实施例中,类似于图5所示,齿轮组件具有星形齿轮构造,其中行星架522通过支撑结构536固定(例如,静态)在发动机内。太阳齿轮504由输入轴(即,低速轴146)驱动。环形齿轮508被构造成在与低速轴146的旋转方向526相对的方向524上旋转,以驱动动力输出源124(例如,风扇轴)来驱动风扇组件。
[0090]
以类似于图5所示的方式,太阳齿轮504在第一接触区域528、530与行星齿轮506啮合,并且环形齿轮508在第二接触区域532、534与行星齿轮506啮合,并且第一接触区域528、530与第二接触区域532、534轴向偏移,以通过减小和/或消除行星齿轮齿上的反向弯曲应力来提供具有更高齿轮比的齿轮组件。
[0091]
图10提供了图5的一部分的放大视图。如图10所示,齿轮组件302的第一接触区域330与第二接触区域334轴向间隔开,使得第一接触区域和第二接触区域之间没有重叠。在第一接触区域330和第二接触区域334之间提供轴向间隙340。在其他接触区域(即,第一接触区域328和第二接触区域332)之间提供类似的间隙。间隙340可以小于相应行星齿轮组(例如,行星齿轮组316)的宽度342的25%,20%或15%。在一些实施例中,第一和第二接触区域之间的间隙340可以小于相应行星齿轮组的宽度342的10%,5%或2%。
[0092]
在非重叠的实施例中,行星齿轮组的宽度可以大于与行星齿轮组啮合的相应太阳齿轮组和环形齿轮组的组合宽度。因此,例如,第一接触区域330(即,第二太阳齿轮组312的宽度)和第二接触区域334(即,第二环形齿轮组320的宽度)的组合宽度小于行星齿轮342的宽度。
[0093]
在其他实施例中,相应环形齿轮组和太阳齿轮组的接触区域可以重叠。例如,图11示出了齿轮组件的一部分的放大视图,该齿轮组件类似于图5所示但是具有重叠接触区域。
[0094]
参考图11,齿轮组件302的第一接触区域330与第二接触区域334轴向间隔开;然而,在第一接触区域330和第二接触区域334之间存在相对少量的重叠344。可以为其他接触区域(即,第一接触区域328和第二接触区域332)提供类似的重叠区域。第一和第二接触区域(例如330、334)之间的重叠量优选地小于相应行星齿轮组(例如,行星齿轮组316)的宽度342的15%。更优选地,第一和第二接触区域之间的重叠量344小于相应行星齿轮组的宽度342的10%,5%或2%。
[0095]
在重叠的实施例中,行星齿轮组的宽度可以小于与行星齿轮组啮合的相应太阳齿轮组和环形齿轮组的组合宽度。因此,例如,在图11中,第一接触区域330(即,第二太阳齿轮组312的宽度)和第二接触区域334(即,第二环形齿轮组320的宽度)的组合宽度大于行星齿轮342的宽度。
[0096]
尽管在以上描述的实施例中以上描述为非罩式或开放式转子发动机,但是应当理解,本文提供的公开的方面可以应用于罩式或管道式发动机,部分管道式发动机,后风扇发动机或其他涡轮机构造,包括用于船舶,工业或航空推进系统的构造。本公开的某些方面可以适用于涡轮风扇发动机,涡轮螺旋桨发动机或涡轮轴发动机。然而,应意识到,本公开的
某些方面可以解决可能特定于非罩式或开发式转子发动机的问题,例如但不限于与齿轮比,风扇直径,风扇速度,发动机的长度(l),发动机的最大直径(d
max
),发动机的l/d
max
,期望的巡航高度和/或期望的操作巡航速度,或其组合有关的问题。
[0097]
例如,图12是发动机600的示例性实施例的横截面示意图,该发动机600包括与管道式风扇推进系统结合的齿轮组件102。然而,与图2的开放式转子构造不同,风扇组件104及其风扇叶片108被包含在环形风扇壳体180内,并且轮叶组件110和轮叶112在风扇罩152与风扇壳体180的内表面之间径向地延伸。如上所述,本文公开的齿轮组件可为固定的齿轮包络(例如,具有相同尺寸的环形齿轮)提供增加的齿轮比,或者替代地,较小直径的环形齿轮可用于实现相同的齿轮比。尽管图12示出了可选的管道式风扇和可选的风扇管道(类似于图2所示),但是应当理解,这种齿轮组件可以与不具有任何这种结构的其他涡轮风扇发动机(以及其他开放式转子发动机)一起使用。
[0098]
该书面描述使用示例来公开本发明,包括最佳模式,并且还使本领域的任何技术人员能够实践本发明,包括制造和使用任何装置或系统以及进行任何结合的方法。本发明的可专利范围由权利要求书限定,并且可以包括本领域技术人员想到的其他示例。如果这样的其他示例包括与权利要求的字面语言没有不同的结构元件,或者如果它们包括与权利要求的字面语言没有实质性差异的等效结构元件,则这些其他示例意图落入权利要求的范围内。
[0099]
本发明的进一步方面由以下条项的主题提供:
[0100]
1.一种涡轮机发动机,包括:风扇组件,其包括多个风扇叶片;核心发动机,其包括涡轮和能够与涡轮一起旋转的输入轴;以及单级周转齿轮组件,其以第一速度接收输入轴,并以第二速度驱动联接至风扇组件的输出轴,第二速度比第一速度慢。齿轮组件包括:太阳齿轮,多个行星齿轮以及环形齿轮,太阳齿轮绕齿轮组件的纵向中心线旋转;太阳齿轮啮合区域,其沿着齿轮组件的纵向中心线,太阳齿轮被构造成在太阳齿轮啮合区域接触多个行星齿轮;环形齿轮啮合区域,其沿着齿轮组件的纵向中心线,环形齿轮被构造成在环形齿轮啮合区域接触多个行星齿轮,其中太阳齿轮啮合区域沿着纵向中心线与环形齿轮啮合区域轴向偏移,使得太阳齿轮啮合区域的宽度的至少50%不与环形齿轮啮合区域轴向重叠。
[0101]
2.根据本文的任何条项所述的涡轮机发动机,其中,太阳齿轮,多个行星齿轮和环形齿轮包括双斜齿轮,并且太阳齿轮包括第一太阳齿轮组和第二太阳齿轮组,多个行星齿轮中的每一个包括第一行星齿轮组和第二行星齿轮组,并且环形齿轮包括第一环形齿轮组和第二环形齿轮组。
[0102]
3.根据本文的任何条项所述的涡轮机发动机,其中,第一环形齿轮组和第二环形齿轮组沿着纵向中心线彼此轴向间隔开,并且第一太阳齿轮组和第二太阳齿轮组定位在第一环形齿轮组和第二环形齿轮组之间。
[0103]
4.根据本文的任何条项所述的涡轮机发动机,其中,第一太阳齿轮组和第二太阳齿轮组沿着纵向中心线彼此轴向间隔开,并且第一环形齿轮组和第二环形齿轮组定位在第一太阳齿轮组和第二太阳齿轮组之间。
[0104]
5.根据本文的任何条项所述的涡轮机发动机,其中,太阳齿轮啮合区域包括第一太阳齿轮啮合区域和第二太阳齿轮啮合区域,第一太阳齿轮组在第一太阳齿轮啮合区域与第一行星齿轮组啮合,第二太阳齿轮组在第二太阳齿轮啮合区域与第二行星齿轮组啮合,
并且环形齿轮啮合区域包括第一环形齿轮啮合区域和第二环形齿轮啮合区域,第一环形齿轮组在第一环形齿轮啮合区域与第一行星齿轮组啮合,第二环形齿轮组在第二环形齿轮啮合区域与第二行星齿轮组啮合。
[0105]
6.根据本文的任何条项所述的涡轮机发动机,其中,第一太阳齿轮啮合区域和第一环形齿轮啮合区域不沿着纵向中心线轴向重叠。
[0106]
7.根据本文的任何条项所述的涡轮机发动机,其中,在第一太阳齿轮啮合区域和第一环形齿轮啮合区域之间存在轴向间隙。
[0107]
8.根据本文的任何条项所述的涡轮机发动机,其中,轴向间隙的间隙宽度小于第一行星齿轮组的宽度的15%,小于第一行星齿轮组的宽度的10%,小于第一行星齿轮组的宽度的5%,或小于第一行星齿轮组的宽度的2%。
[0108]
9.根据本文的任何条项所述的涡轮机发动机,其中,在第一太阳齿轮啮合区域和第一环形齿轮啮合区域之间存在轴向重叠,并且轴向重叠的量小于第一行星齿轮组的宽度的15%,小于第一行星齿轮组的宽度的10%,小于第一行星齿轮组的宽度的5%,或小于第一行星齿轮组的宽度的2%。
[0109]
10.根据本文的任何条项所述的涡轮机,其中,齿轮组件的齿轮比的范围从6:1至14:1,从6.6至12:1,从7:1至12:1或从8:1至12:1。
[0110]
11.根据本文的任何条项所述的涡轮机,其中,齿轮组件是行星齿轮构造,在行星齿轮构造中,环形齿轮相对于发动机固定并且不旋转。
[0111]
12.根据本文的任何条项所述的涡轮机,其中,齿轮组件是星形齿轮构造,在星形齿轮构造中,行星齿轮相对于发动机固定并且不旋转。
[0112]
13.根据本文的任何条项所述的涡轮机,其中,风扇组件是单级非管道式风扇叶片。
[0113]
14.根据本文的任何条项所述的涡轮机,其中,第一行星齿轮组的宽度大于第一太阳齿轮组和第一环形齿轮组的组合宽度。
[0114]
15.根据本文的任何条项所述的涡轮机,其中,第一行星齿轮组的宽度小于第一太阳齿轮组和第一环形齿轮组的组合宽度。
[0115]
16.根据本文的任何条项所述的涡轮机,其中,风扇组件具有十至十六个叶片,或十至十四个叶片,或十二个叶片。
[0116]
17.根据本文的任何条项所述的涡轮机,其中,在巡航飞行条件下的风扇叶片末端速度为650至900fps,或700至800fps。
[0117]
18.根据本文的任何条项所述的涡轮机,其中,风扇组件的风扇压力比(fpr)可以是1.04至1.10,或者在一些实施例中是1.05至1.08,如在巡航飞行条件下跨风扇叶片测量的。
[0118]
19.一种齿轮组件,该齿轮组件以第一速度构造输入轴并且以比第一速度慢的第二速度驱动输出轴,该齿轮组件包括:太阳齿轮,多个行星齿轮和环形齿轮,太阳齿轮围绕齿轮组件的纵向中心线旋转;太阳齿轮啮合区域,其沿着齿轮组件的纵向中心线,太阳齿轮被构造成在太阳齿轮啮合区域接触多个行星齿轮;环形齿轮啮合区域,其沿着齿轮组件的纵向中心线,环形齿轮被构造成在环形齿轮啮合区域接触多个行星齿轮,其中太阳齿轮啮合区域沿着纵向中心线与环形齿轮啮合区域轴向偏移,使得太阳齿轮啮合区域的宽度的至
少50%不与环形齿轮啮合区域轴向重叠。
[0119]
20.根据本文的任何条项所述的齿轮组件,其中,太阳齿轮,多个行星齿轮和环形齿轮包括双斜齿轮,并且太阳齿轮包括第一太阳齿轮组和第二太阳齿轮组,多个行星齿轮中的每一个包括第一行星齿轮组和第二行星齿轮组,并且环形齿轮包括第一环形齿轮组和第二环形齿轮组。
[0120]
21.根据本文的任何条项所述的齿轮组件,其中,第一环形齿轮组和第二环形齿轮组沿着纵向中心线彼此轴向间隔开,并且第一太阳齿轮组和第二太阳齿轮组定位在第一环形齿轮组和第二环形齿轮组之间。
[0121]
22.根据本文的任何条项所述的齿轮组件,其中,第一太阳齿轮组和第二太阳齿轮组沿着纵向中心线彼此轴向间隔开,并且第一环形齿轮组和第二环形齿轮组定位在第一太阳齿轮组和第二太阳齿轮组之间。
[0122]
23.根据本文的任何条项所述的齿轮组件,其中,太阳齿轮啮合区域包括第一太阳齿轮啮合区域和第二太阳齿轮啮合区域,第一太阳齿轮组在第一太阳齿轮啮合区域与第一行星齿轮组啮合,第二太阳齿轮组在第二太阳齿轮啮合区域与第二行星齿轮组啮合,并且环形齿轮啮合区域包括第一环形齿轮啮合区域和第二环形齿轮啮合区域,第一环形齿轮组在第一环形齿轮啮合区域与第一行星齿轮组啮合,第二环形齿轮组在第二环形齿轮啮合区域与第二行星齿轮组啮合。
[0123]
24.根据本文的任何条项所述的齿轮组件,其中,第一太阳齿轮啮合区域和第一环形齿轮啮合区域不沿着纵向中心线轴向重叠。
[0124]
25.根据本文的任何条项所述的齿轮组件,其中,在第一太阳齿轮啮合区域和第一环形齿轮啮合区域之间存在轴向间隙。
[0125]
26.根据本文中的任何条项所述的齿轮组件,其中,轴向间隙的间隙宽度小于第一行星齿轮组的宽度的15%,小于第一行星齿轮组的宽度的10%,小于第一行星齿轮组的宽度的5%,或小于第一行星齿轮组的宽度的2%。
[0126]
27.根据本文的任何条项所述的齿轮组件,其中,在第一太阳齿轮啮合区域和第一环形齿轮啮合区域之间存在轴向重叠,并且轴向重叠的量小于第一行星齿轮组的宽度的15%,小于第一行星齿轮组的宽度的10%,小于第一行星齿轮组的宽度的5%,或小于第一行星齿轮组的宽度的2%。
[0127]
28.根据本文的任何条项所述的齿轮组件,其中,齿轮组件的齿轮比的范围从6:1至14:1,从6.6至12:1,从7:1至12:1或从8:1至12:1。
[0128]
29.根据本文的任何条项所述的齿轮组件,其中,齿轮组件是行星齿轮构造或星形齿轮构造。
[0129]
30.根据本文的任何条项所述的涡轮机,其中,第一行星齿轮组的宽度大于第一太阳齿轮组和第一环形齿轮组的组合宽度,或者其中,第一行星齿轮组的宽度小于第一太阳齿轮组和第一环形齿轮组的组合宽度。
[0130]
31.根据本文的任何条项所述的涡轮机或齿轮组件,其中,齿轮组件被构造成提供范围从20knm至200knm的输出扭矩,或者在其他实施例中从40knm至150knm的输出扭矩。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。