1.本发明涉及农作物生长信息领域,更具体地说,它涉及一种作物生长信息传感器自平衡装置及其设计方法。
背景技术:
2.作物生长信息传感器上下表面同时接收阳光和作物的反射光,获取作物的反射率,进而反演得到作物的生长信息。在监测作物反射率时,要求反射光和阳光的接收面处于水平状态,现有传感器在使用时由人工观察水平尺进行调整,费时且效率很低,且作物生长传感器多集成于便携式设备上,需由人手持进行测量,在测量过程中,人工很难保证反射光和阳光接收面始终为水平状态,从而造成测量误差。
3.在实际应用中,各类作物高度的高矮不一,人工手持测量时会形成不同的俯仰倾斜角,针对待测作物高度的不同,需设计匹配传感器的尺寸适合的平衡装置以满足测量使用需求。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种解决上述问题的一种作物生长信息传感器自平衡装置及其设计方法,针对不同待测作物高度,设计出适合尺寸以满足某一作物测量使用需求,提高设计效率和成功率。
5.为实现上述目的,本发明提供了如下技术方案:一种作物生长信息传感器自平衡装置,所述平衡装置为架设在传感器壳体上的平衡环,平衡环包括至少两层活动连接的共圆心连接环,最内层的内环直径两端与传感器壳体活动连接,相邻两连接环的连接点位于外层连接环的直径上,最外层的外环外壁上设有手柄;至少存在一条相邻两层连接环连接点的连线,与内环和传感器壳体连接点的连线在水平面内相互垂直;各层连接环的内径以及高度影响着为使传感器中轴线竖直向下所调整的连接环转动角度。当手柄左右转动或做俯仰运动超过这个最大角度时,传感器的外壁将碰触到连接环,失去自动调整平衡的作用,因此应针对待检测目标作物的高度,根据实际应用中需要调整的最大角度来设计平衡环的内径以及高度。
6.设计各层连接环,使其满足转动的最大角度θ大于等于该连接环使用中最大俯仰角的要求,,其中r为传感器壳体半径,r为各层连接环内圈半径,h为各层连接环与其相邻内层连接环或传感器壳体连接点至该连接环底边的距离。
7.本发明进一步改进技术方案是,内环与传感器壳体的活动连接是,在内环内壁上
设径向卡柱,与传感器壳体上开设的架设孔活动卡接。
8.本发明更进一步改进技术方案是,所述卡柱是圆柱形,顶部为半球状。卡柱设为圆柱形且顶部设为半圆,当传感器在自身重力下沉时可保证卡柱与架设孔的接触面较小,使得平衡环架设在传感器壳体上时校灵敏,卡柱的顶部与架设孔相互抵触即顶在架设孔内壁,又有效防止因太过灵敏而引起的传感器长时间摆动不进入稳定状态。
9.本发明进一步改进技术方案是,所述卡柱外表面和/或架设孔内表面设置摩擦面。在卡柱内表面或架设孔外表面或者两者兼有设置摩擦面,增大两者的接触摩擦,进一步减小因太过灵敏而引起的传感器长时间摆动不进入稳定状态。
10.本发明更进一步改进技术方案是,相邻两连接环的活动连接是,外层连接环内壁设销轴,内层连接环侧壁上开连接孔,销轴活动穿接在连接孔中。销轴连接调整灵敏度好。
11.本发明更进一步改进技术方案是,各层连接环与其相邻内层的连接环或传感器壳体的连接点,位于该连接环高度的中心位置。便于设计测算,同时连接环的机械强度较好。
12.本发明更进一步改进技术方案是,连接环的高度为2~50mm。在保证连接环的机械强度同时,结构更加小巧合理。
13.本发明更进一步改进技术方案是,内环与传感器壳体活动连接点位于传感器上部三分之一范围内,利于传感器快速进入平衡状态。
14.本发明更进一步改进技术方案是,当传感器的轴线竖直且内外平衡环水平时,所述手柄轴心在内环与传感器壳体连接点的连接线延伸线上。
15.本发明还提供了一种作物生长信息传感器自平衡装置的设计方法,(1)根据待测作物确定传感器型号,得到传感器壳体半径r;根据机械强度、便于安装等要求确定连接环高h;各层连接环与其相邻内层连接环或传感器壳体连接点至该连接环底边的距离为h;(2)设计左右倾斜连接环的内径r:先预设使用中手柄左右转动产生的连接环最大俯仰角γ,根据,设计r值满足θ≥γ;(3)设计前后倾斜连接环的内径r:预设测量时作物株高或冠层高度为h
作物
,传感器在作物上方距离为h
测
,测量人员与作物的水平距离为l,平衡环手柄连接着长杆,测量人员手持长杆的位置距地面的高度为h
手
,当作物矮而手持长杆向下倾斜测量时,长杆与水平面的倾角为γ,,当作物高而手持长杆向上倾斜测量时,长杆与水平面的倾角为γ,;以此推算出作物最矮株高和最大株高监测时连接环使用中的最大俯仰角γ,根据,设计r值满足θ≥γ;(4)对比步骤(2)与步骤(3)中计算得到的r,若内层连接环的r明显的小于外层连接环的r,则各层连接环设计尺寸符合要求,或为便于安装则内层连接环的r可适当增大;若
内层连接环的r大于等于或略小于外层连接环的r导致无法安装,则适当增大外层连接环的r。
16.本发明有益效果:一、本发明架设于传感器壳体上,手持手柄,传感器可自行调整保持竖直平衡状态,效率极高,使得采集阳光和作物反射光的上下两个端面处于水平状态,提高传感器监测数据的准确性,有利于促进农业信息传感器的推广应用。
17.二、因待测作物高度不同,所需平衡环最大转动角度有异,本发明为传感器平衡装置的尺寸设计提供理论指导,提高了设计效率和成功率,有利于促进平衡装置的设计与应用。
附图说明
18.图1为本发明结构示意图;图2为内环转动最大角度θ设计推算示意图;图3为内环转动的最大角度随其半径、高度变化而变化的关系示意图;图4为外环转动最大角度θ设计推算示意图;图5为实施例1中待测植株最矮时预测外环最大俯仰角γ;图6为实施例1中待测植株最高时预测外环最大俯仰角γ;图7为实施例2中待测植株最矮时预测外环最大俯仰角γ;图8为实施例2中待测植株最高时预测外环最大俯仰角γ;图9为实施例3中待测植株最矮时预测外环最大俯仰角γ;图10为实施例3中待测植株最高时预测外环最大俯仰角γ。
具体实施方式
19.如图1所示,本发明所述平衡装置为架设在传感器壳体1上的平衡环,平衡环由内环和外环活动连接而成,在内环2直径两端内壁上设径向圆柱形卡柱5,与传感器壳体1上开设的架设孔活动卡接,卡柱5顶部为半球状,卡柱外表面和/或架设孔内表面设置摩擦面(图中未示出)。外环3与内环2同圆心,外环3与内环2在外环3直径上采用销轴6活动连接,即外环内壁设销轴6,内环侧壁上开连接孔,销轴活动穿接在连接孔中形成活动连接,内环与传感器壳体连接点的连线,和外环与内环连接环连接点的连线在水平面内相互垂直,外环与内环连接点位于外环、内环高度的中心,内环与传感器壳体的连接点位于内环高度的中心,位于传感器壳体上部三分之一范围内,外环3外壁上设有手柄4,当传感器的轴线竖直且内外平衡环水平时,手柄4轴心在内环与传感器壳体连接点的连接线延伸线上。
20.连接环的内径以及高度影响着为使传感器中轴线竖直向下所调整的连接环转动角度。当手柄左右转动超过一定角度时,传感器壳体外壁会碰触到内环,当手柄做俯仰运动超过一定角度时,传感器壳体的外壁将碰触外环,失去自动调整平衡的作用。手柄转动尽量保持在较小的角度范围内,手柄的俯仰运动跟作物的高度相关。针对不同待观测作物高度,根据实际应用中可能调整的最大角度来设计平衡环的内径以及高度。
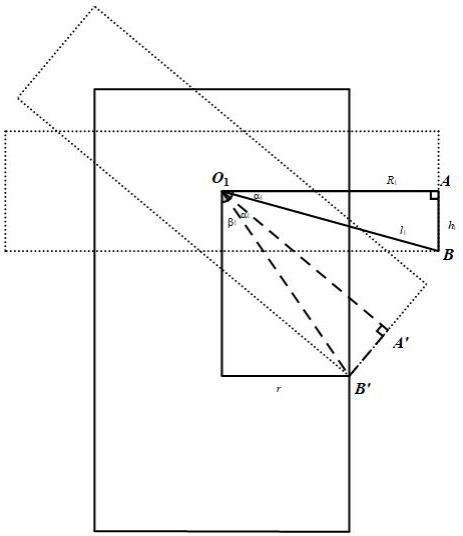
21.设计内环转动的最大角度θ1,如图2所示,圆柱状传感器壳体半径为r,内环内径r1,内环高度为2h1,内环与传感器壳体连接的卡柱中轴线位于内环高度的中心位置,所以卡柱
中轴线至内环底边的距离为h1,当传感器垂直向下,内外环均水平时,卡柱5中轴线与传感器中轴线的交点为o1点,过o1点的内环内壁的半径与内环内壁的水平交点为a,o1点到a点距离为r1,o1a与传感器中轴线垂直,a点在内环内壁下沿的垂直投影点为b,o1点到b点距离为l1,o1a与o1b的夹角为a1,当内环转动最大角度θ1时,内环下沿触碰垂直向下的传感器壳体外壁,此时a旋转到a
′
,b旋转到b
′
,o1点与内环下沿的连线o1b
′
与传感器中轴线的夹角为β1,o1a与o1a
′
的夹角,;θ1随r1、h1的变化情况见图3,内环既要满足机械强度又要满足美观的要求,所以h1的优选范围是1mm~25mm,假设传感器的r=40mm,r1的范围从50mm到150mm。由图3可知,h1可调整的θ1范围要远小于r1可调整的θ1范围,因此在实际的设计中,优选通过调整r1来调整内平环的最大倾角,在满足机械强度的前提下,h1可以适当的减小。
22.设计外环转动的最大角度θ2,如图4所示,圆柱状传感器壳体半径为r,外环内径r2,外环高度为2h2,外环与内环连接点位于外环、内环高度的中心位置,所以外环与内环连接点至外环底边的距离为h2,当传感器垂直向下,内外环均水平时,内外环连接点销轴6的中轴线与传感器中轴线的交点为o2点,过o2点的外环内壁的半径与外环内壁的水平交点为c,o2点到c点距离为r2,o2c与传感器中轴线垂直,c点在外环内壁下沿的垂直投影点为d,o2点到d点距离为l2,o2c与o2d的夹角为a2,当外环转动最大角度θ2时,外环下沿触碰垂直向下的传感器壳体外壁,此时c旋转到c
′
,d旋转到d
′
,o2点与外环下沿的连线o2d
′
与传感器中轴线的夹角为β2,o2c与o2c
′
的夹角,与内环设计同理,;在平衡环设计时,要满足θ2大于实际应用中平衡环的最大倾角。如果θ2角度不够大,可加大外环的内径r2或减少外环与内环连接点到外环底边的高度h2,但因减小h2会降低
平衡环的机械强度,且所能增加θ2的角度范围小,因此优选增加外环的内径r2。
23.在实际应用中,当内外环的两个连接点的连线与手柄的中轴线垂直时,θ2要大于等于应用中的手柄连接的长杆的最大倾角;当内外环的两个连接点的连线与手柄的中轴线平行时,θ1要大于等于应用中的手柄连接的长杆的最大倾角。
24.本发明编制了传感器在常见尺寸下,r、r和h不同配合下的表格,见表1,可供设计平衡装置时参考。
25.表1 不同r、r、h情况下的θ
实施例1农作物传感器用于监测小麦,r=20mm,平衡环使用金属(如不锈钢或铝合金)制作,使用两层连接环,根据美观和机械强度要求,h1=h2=2mm,内外环的两个连接点的连线与手柄的中轴线垂直,从作物长至株高1cm到收获这段时间范围使用传感器测量,平衡装置外环的手柄固定在长杆上,测量人员手持长杆进行测量,设手握长杆的位置距地面的高度为90cm,测量时人与作物的水平距离为100cm,长杆的转动不超过30
°
,株高1cm至封行前测量时传感器在冠层上方20cm处,封行后测量时传感器在冠层上方50cm处。为提高平衡环的在实际工作中的适应性,假设小麦的最大高度为150cm。
26.第一步,设计内环的内径r1。因长杆的转动不超过30
°
,所以r1的设计只要满足θ1≥30
°
即可。由本发明的方法计算或由表1可知,当r1=25mm时,θ1=33
°
>30
°
,满足需要。
27.第二步,确定外环内径的最小尺寸以满足株高1cm时的测量要求。测量1cm高的小麦时,结合图5示意,长杆与水平面的夹角γ的计算方法如下:ab为株高,等于1cm,c点为传感器位置,bc长度为20cm,f点为测量人员的站立位置,af为测量人员与作物的水平距离100cm,df为手握长杆的位置距地面的高度90cm,ce∥af且ce=af,则。由本发明的方法计算或由表1可知,当r2=30mm时,θ2=44
°
>γ,满足需要。
28.第三步,确定外环内径的最小尺寸以满足小麦最大株高时的测量要求。测量150cm高的小麦时,结合图6示意,长杆与水平面的夹角γ的计算方法如下:ab为株高,等于150cm,c点为传感器位置,bc长度为50cm,f点为测量人员的站立位置,af为测量人员与作物的水平距离100cm,df为手握长杆的位置距地面的高度90cm,de∥af且de=af,则
。由本发明的方法计算或由表1可知,当r2=35mm时,θ2=52
°
>γ,满足需要。
29.综合考虑第二步和第三步,确定r2=35mm,由第一步确定r1=25mm,为便于内外环的安装,内环的内径也可以适当增大。
30.实施例2:测量人员与作物的水平距离为200cm,其它条件与实施例1相同。
31.第一步,设计内环的内径r1。因长杆的转动不超过30
°
,所以r1的设计只要满足θ1≥30
°
即可。由本发明的方法计算或由表1可知,当r1=25mm时,θ1=33
°
>30
°
,满足需要。
32.第二步,确定外环内径的最小尺寸以满足株高1cm时的测量要求。测量1cm高的小麦时,结合图7示意,长杆与水平面的夹角γ的计算方法如下:ab为株高,等于1cm,c点为传感器位置,bc长度为20cm,f点为测量人员的站立位置,af为测量人员与作物的水平距离200cm,df为手握长杆的位置距地面的高度90cm,ce∥af且ce=af,则。由本发明的方法计算或由表1可知,当r2=25mm时,θ2=33
°
>γ,满足需要。
33.第三步,确定外环内径的最小尺寸以满足小麦最大株高时的测量要求。测量150cm高的小麦时,结合图8示意,长杆与水平面的夹角γ的计算方法如下:ab为株高,等于150cm,c点为传感器位置,bc长度为50cm,f点为测量人员的站立位置,af为测量人员与作物的水平距离200cm,df为手握长杆的位置距地面的高度90cm,de∥af且de=af,则。由本发明的方法计算或由表1可知,当r2=25mm时,θ2=33
°
>γ,满足需要。
34.综合考虑第二步和第三步,确定r2=25mm,由第一步确定r1=25mm,但外环的内径一定大于内环的外径,因此为便于内外环的安装,外环的内径需要适当增大。
35.实施例3:农作物传感器用于监测玉米,传感器的r=40mm,平衡环有两层,使用塑料或尼龙制作,根据美观和机械强度要求,h1=h2=3mm。考虑到品种因素,管理条件,为提高平衡装置的适用性,假设玉米的最大株高为300cm,玉米封行后,测量时传感器在玉米冠层上方50cm处,测量人员与玉米的水平距离为300cm,在玉米出苗后株高1cm至封行前测量时,传感器在玉米上方20cm处,测量人员与玉米的水平距离为100cm。平衡装置的外环装有手柄,手柄固定在长杆上,测量人员手持长杆进行测量,设手握长杆的位置距地面的高度为90cm,内外环的两个固定点的连线与手柄的中轴线垂直,手柄的转动不超过30
°
。
36.第一步,设计内环的内径r1。因长杆的转动不超过30
°
,所以r1的设计只要满足θ1≥30
°
即可。由本发明的方法计算或由表1可知,当r1=50mm时,θ1=34
°
>30
°
,满足需要。
37.第二步,确定外环内径的最小尺寸以满足株高1cm时的测量要求。测量1cm高的玉米时,结合图9示意,长杆与水平面的夹角γ的计算方法如下:ab为株高,等于1cm,c点为传感器位置,bc长度为20cm,f点为测量人员的站立位置,af为测量人员与作物的水平距离
100cm,df为手握长杆的位置距地面的高度90cm,ce∥af且ce=af,则。由本发明的方法计算或由表1可知,当r2=55mm时,θ2=40
°
>γ,满足需要。
38.第三步,确定外环内径的最小尺寸以满足玉米最大株高时的测量要求。测量150cm高的小麦时,结合图10示意,长杆与水平面的夹角γ的计算方法如下:ab为株高,等于300cm,c点为传感器位置,bc长度为50cm,f点为测量人员的站立位置,af为测量人员与作物的水平距离300cm,df为手握长杆的位置距地面的高度90cm,de∥af且de=af,则。由本发明的方法计算或由表1可知,当r2=60mm时,θ2=45
°
>γ,满足需要。
39.综合考虑第二步和第三步,确定r2=60mm,由第一步确定r1=50mm,为便于内外环的安装,内环的内径可适当增大。
40.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

