1.本发明涉及自动养蚕系统、自动养蚕方法、程序以及存储介质。
背景技术:
2.已知有用于饲养蚕的蚕饲养容器。在蚕饲养容器内收纳有蚕及饲料。蚕饲养容器内的蚕食用蚕饲养容器内的饲料而成长。
3.在饲养蚕的情况下,一般需要每天(除了蚕的睡眠期以外)将桑叶等饲料供给到蚕饲养容器。蚕的幼虫期约为25天,幼虫期蜕皮四次。然后,在最终龄的第五龄期,蚕在体内合成蚕丝蛋白,吐出约1200m的丝,用该丝结茧。
4.作为关联技术,在专利文献1中记载了养蚕方法。在专利文献1所记载的养蚕方法中,在平板状的托盘铺设片状的养蚕用饲料,在其上配设网。网用于在蚕进行蜕皮时供蚕抓取。
5.一直以来,介绍了养蚕省力化的尝试。在专利文献2中记载了一种蚕的饲养方法,是一种使用人工饲料的蚕的饲养方法,通过由臂部进行多层重叠的饲养托架的转载、饲养蚕的饲养网的移动,来简化作业。并且,在专利文献1中记载了在进行无菌室中的饲养中的蚕的饲养的情况下,通过简化作业工序,来减少杂菌从外部的侵入、室内的浮游菌的影响。
6.在专利文献3中记载了一种蚕的饲养装置,为了在饲养大量的蚕时实现省力化,利用驱动设备使收纳于多层饲养搁架的饲养笼10循环移动,或者将饲养笼10自动地搬运到作业口。
7.现有技术文献
8.专利文献
9.专利文献1:日本特开2004
‑
129546号公报
10.专利文献2:日本专利第3657326号公报
11.专利文献3:日本专利第6134021号公报
技术实现要素:
12.发明所要解决的课题
13.然而,在专利文献1中,蚕的饲养大部分由人手进行。因此,蚕的饲养所需的成本较高。并且,由于蚕的饲养大部分由人手进行,所以杂菌混入到蚕的饲养环境的风险相对较高。
14.并且,在专利文献2所记载的蚕的饲养方法中,能够在放入有人工饲料的饲养托盘的转载、饲养网的移动中使用臂,但饲料的供给、上蔟装置的设置等无法自动化地进行,并非使养蚕的所有工序自动化地进行。
15.而且,在专利文献3所记载的蚕的饲养装置中,利用驱动设备使饲养笼10循环移动,或者将饲养笼10自动地搬运到作业口,但塑料袋的装卸、饲养笼的更换等无法自动化地进行,并非使养蚕的所有工序自动化地进行。
16.本发明的目的在于,提供一种能够在无菌状态下饲养蚕且能够使养蚕的所有工序自动化地进行的自动养蚕系统。
17.用于解决课题的方案
18.上述的本发明的目的由以下自动养蚕系统实现,该自动养蚕系统的特征在于,具备:
19.蚕卵供给机构,其向集中饲养容器自动地供给蚕卵;
20.饲料供给机构,其向集中饲养容器自动地供给饲料;
21.蚕移动机构,其使蚕自动地从集中饲养容器移动到单独饲养容器;
22.蚕茧取出机构,其从单独饲养容器自动地取出蚕茧;
23.饲养容器自动收纳机构,其将集中饲养容器和/或单独饲养容器自动地收纳于饲养搁架,并且从饲养搁架自动地取出集中饲养容器和/或单独饲养容器;以及
24.饲养容器移动机构,其使集中饲养容器和/或单独饲养容器自动地在上述各机构之间移动。
25.发明的效果如下。
26.根据本发明的自动养蚕系统,能够提供一种能够在无菌状态下饲养蚕且能够使养蚕的所有工序自动化地进行的自动养蚕系统。
附图说明
27.图1是示意性地示出第一实施方式中的蚕饲养系统的图。
28.图2是示出第一实施方式的蚕饲养方法的一例的流程图。
29.图3是示意性地示出第二实施方式的蚕饲养系统的图。
30.图4是示意性地示出第二实施方式的蚕饲养系统的简要立体图。
31.图5是示意地示出饲料供给装置的一例的图。
32.图6是示意性地示出第一饲养容器的一例的简要立体图。
33.图7是示意性地示出分隔部件移动装置的一例的图。
34.图8是示出第一饲养工序的一例的流程图。
35.图9是示意性地示出第一饲养工序的一例的图。
36.图10是示意性地示出第一饲养容器的一例的简要立体图。
37.图11是示意性地示出蚕卵移载装置的一例的简要剖视图。
38.图12是示意性地示出蚕卵移载装置的一例的简要主视图。
39.图13是示意性地示出第二实施方式的蚕饲养系统的图。
40.图14是示意性地示出第二饲养容器的一例的简要立体图。
41.图15是示意性地示出第二饲养容器的一例的简要立体图。
42.图16是示出第二实施方式的蚕饲养方法的一例的流程图。
43.图17是示意性地示出在实施方式的蚕饲养系统中能够采用的蚕移载装置的一例的图。
44.图18是系统整体的俯视图。
45.图19是第一周转箱的俯视图。
46.图20是第二周转箱的俯视图。
47.图21是图20的侧视图。
48.图22是集中饲养容器的照片。
49.图23是分隔部件的照片。
50.图24是分隔部件从单独饲养容器突出的情况下的照片。
51.图25是从单独饲养容器取出蚕茧时的照片。
52.图26是机器人手臂的照片。(手臂右侧为蚕粪回收纳器,手臂跟前为蚕茧回收容器)
53.图27是相机的照片。
54.图28是蚕茧拾取机构的照片。
55.图29是饲养搁架的照片。
56.图30是饲养容器自动收纳机构的轨道的照片。
57.图31是饲养容器自动收纳机构的照片。
58.图32是漏斗移动方式说明图。
59.图33是带闸门的漏斗的说明图。
60.图34是框格(升目)移动方式的说明图。
61.图35是波型框格的说明图。
62.图36是网型框格的说明图。
63.图37是蚕分散方式说明图。
具体实施方式
64.以下,参照附图对本发明的实施方式的自动养蚕系统、自动养蚕方法、程序以及存储介质进行说明。其中,以下所示的实施方式示例出用于将本发明的技术思想具体化的自动养蚕系统、自动养蚕方法、程序以及存储介质,并不将本发明特定为这些实施方式,也能够同等地应用于权利要求书所包括的其它实施方式。此外,在以下的说明中,对具有相同功能的部件、部位标注同一符号,对于标注有同一符号的部件、部位,省略重复的说明。
65.[第一实施方式]
[0066]
参照图1及图2,对第一实施方式的蚕饲养系统1a及蚕饲养方法进行说明。图1是示意性地示出第一实施方式的蚕饲养系统1a的图。图2是示出第一实施方式的蚕饲养方法的一例的流程图。
[0067]
第一实施方式的蚕饲养系统1a具备从第一饲养容器c1向第二饲养容器c2移载蚕的蚕移载装置10、以及搬运第二饲养容器c2的第二饲养容器搬运装置20。
[0068]
优选在第一饲养容器c1的内部,集中饲养多个蚕a。换言之,第一饲养容器c1优选为用于在饲养室内集中饲养多个蚕的集中饲养用容器。在第一饲养容器c1内,例如集中饲养10个以上且1000个以下、30个以上且500个以下、或者50个以上且300个以下的蚕。1个第一饲养容器c1中的饲养区域的面积(俯视时的面积)例如为100cm2以上且10000cm2以下、400cm2以上且4900cm2以下、900cm2以上且2500cm2以下。第一饲养容器c1例如是上方敞开的容器。
[0069]
优选在第二饲养容器c2的内部,单独饲养多个蚕a。换言之,第二饲养容器c2优选为用于在各饲养室内单独饲养1个蚕的单独饲养用容器。在图1所记载的例子中,第二饲养
容器c2包括相互隔离的多个饲养室sp。在图1所记载的例子中,第二饲养容器c2包括第一饲养室sp1及第二饲养室sp2,第一饲养室sp1与第二饲养室sp2相互隔离。第二饲养容器c2所具备的饲养室sp的数量例如为10个以上、30个以上、或者50个以上。
[0070]
各饲养室sp既可以由独立的筒状容器规定,也可以由配置在壳体部件内(例如,容器内或框内)的分隔壁规定。换言之,第二饲养容器c2既可以是多个筒状容器的集合体,也可以在规定外壁的壳体部件的内侧配置有多个分隔壁。
[0071]
蚕移载装置10将蚕a从第一饲养容器c1移载到第二饲养容器c2。
[0072]
在图1所记载的例子中,蚕移载装置10以在各饲养室sp中仅收纳1个蚕a的方式(例如,以在第一饲养室sp1中仅收纳1个蚕且在第二饲养室sp2中仅收纳1个蚕的方式)将蚕a从第一饲养容器c1移载到第二饲养容器c2。
[0073]
蚕移载装置10例如具备蚕保持部件11和保持部件移动装置12,该保持部件移动装置12使蚕保持部件11从第一饲养容器c1朝向第二饲养容器c2移动。蚕移载装置10也可以具备能够拍摄蚕的相机13。
[0074]
蚕保持部件11是能够保持蚕的部件。蚕保持部件11也可以具备第一把持部11a和第二把持部11b。在该情况下,通过减小第一把持部11a与第二把持部11b之间的间隔,蚕保持部件11能够把持1个蚕。代替地或附加地,蚕保持部件11也可以具备能够吸附蚕的表皮的真空吸附部11c。
[0075]
保持部件移动装置12例如是能够三维地变更蚕保持部件11的位置的装置。保持部件移动装置12例如是机器人手臂。
[0076]
相机13基于来自控制装置30的控制指令,拍摄第一饲养容器c1内的多个蚕a。由相机13获取到的图像数据通过有线或无线被发送到控制装置30。控制装置30基于图像数据来判定多个蚕中的各个蚕的位置及姿势。控制装置30基于判定结果来控制保持部件移动装置12及蚕保持部件11。由控制装置30控制后的蚕保持部件11保持一个蚕。之后,控制装置30控制保持部件移动装置12,使蚕保持部件11朝向第二饲养容器c2中的1个饲养室sp(例如第一饲养室sp1)移动。控制装置30控制蚕保持部件11,解除蚕保持部件11对蚕的保持。其结果,蚕被收纳于第二饲养容器c2中的1个饲养室sp(例如第一饲养室sp1)。
[0077]
反复执行将第一饲养容器c1内的蚕移载到第二饲养容器c2中的1个饲养室sp的动作。例如,当在第一饲养室sp1中收纳有1个蚕后,相机13基于来自控制装置30的控制指令,再次拍摄第一饲养容器c1内的多个蚕。由相机13获取到的图像数据被发送到控制装置30。控制装置30基于图像数据来判定多个蚕中的各个蚕的位置及姿势。控制装置30基于判定结果来控制保持部件移动装置12及蚕保持部件11。由控制装置30控制后的蚕保持部件11保持一个蚕。之后,控制装置30控制保持部件移动装置12,使蚕保持部件11朝向第二饲养容器c2中的1个饲养室sp(例如第二饲养室sp2)移动。控制装置30控制蚕保持部件11,解除蚕保持部件11对蚕的保持。其结果,蚕被收纳于第二饲养容器c2中的1个饲养室sp(例如第二饲养室sp2)。
[0078]
第二饲养容器搬运装置20使第二饲养容器c2从蚕移载区域ar移动到第二饲养容器保管区域ar2。蚕移载区域ar是进行从第一饲养容器c1向第二饲养容器c2的蚕a的移载的区域。另一方面,第二饲养容器保管区域ar2是保管第二饲养容器c2的区域。在图1所记载的例子中,在第二饲养容器保管区域ar2配置有搁架t2,在该搁架t2保管有第二饲养容器c2。
[0079]
在图1所记载的例子中,搁架t2是设置于第二饲养容器保管区域ar2的固定搁架。并且,第二饲养容器搬运装置20在蚕移载区域ar与第二饲养容器保管区域ar2之间搬运第二饲养容器c2。代替地,第二饲养容器搬运装置20也可以在蚕移载区域ar与第二饲养容器保管区域ar2之间搬运载置有第二饲养容器c2的搁架t2。换言之,搁架t2也可以是移动搁架。
[0080]
在第二饲养容器c2位于第二饲养容器保管区域ar2时,第二饲养容器c2内的蚕食用饲料f而成长。
[0081]
第二饲养容器搬运装置20也可以包括带式输送机、辊式输送机等输送机。代替地或附加地,第二饲养容器搬运装置20也可以包括带有向搁架t2移载第二饲养容器c2的移载装置的搬运装置(例如堆装垛起重机)。第二饲养容器搬运装置20基于来自控制装置30的指令,将第二饲养容器c2搬运到第二饲养容器保管区域ar2中的预定的保管位置(多个保管位置中的空置状态的保管位置)。第二饲养容器搬运装置20例如由马达驱动。
[0082]
控制装置30控制蚕移载装置10和/或第二饲养容器搬运装置20的动作。控制装置30所具有的计算机的数量可以是1台,也可以是多台。换言之,既可以是1台计算机作为控制装置30发挥功能,也可以是通过多台计算机协作而多个计算机作为控制装置30发挥功能。
[0083]
第一实施方式的蚕饲养系统1包括蚕移载装置10及第二饲养容器搬运装置20。因而,能够自动化地进行蚕从第一饲养容器c1向第二饲养容器c2的移载和移载有蚕的第二饲养容器c2的移动。其结果,提高蚕的饲养效率。并且,由于不用手动作业进行蚕的移载和第二饲养容器c2的移动,所以实质上杂菌不会混入到蚕的饲养环境。
[0084]
在第一实施方式中,蚕饲养系统1a也可以具备将第一饲养容器c1从第一饲养容器保管区域ar1搬运到蚕移载区域ar的第一饲养容器搬运装置40。第一饲养容器搬运装置40优选为与第二饲养容器搬运装置20不同的搬运装置。第一饲养容器搬运装置40例如包括带式输送机、辊式输送机等输送机。第一饲养容器搬运装置40也可以包括带有向搁架t1移载第一饲养容器c1的移载装置的搬运装置。第一饲养容器搬运装置40例如由马达驱动。
[0085]
在蚕饲养系统1a具备第一饲养容器搬运装置40的情况下,能够自动化地进行第一饲养容器c1向蚕移载区域ar的移动。其结果,进一步提高蚕的饲养效率。并且,由于不用手动作业进行第一饲养容器c1的移动,所以实质上杂菌不会混入到蚕的饲养环境。
[0086]
在图1所记载的例子中,在第一饲养容器保管区域ar1配置有搁架t1,在该搁架t1保管有第一饲养容器c1。在第一饲养容器c1位于第一饲养容器保管区域ar1时,第一饲养容器c1内的蚕食用饲料而成长。
[0087]
在第一实施方式中,第一饲养容器保管区域ar1优选配置在无菌气氛at内。并且,第二饲养容器保管区域ar2优选配置在无菌气氛at内。同样,蚕移载区域ar优选配置在无菌气氛at内。此外,在本说明书中,无菌气氛at是实质上与外部隔离的空间内的气氛,意思是设定为微生物的存在量比外部少的气氛。在iso基准(iso14644
‑
1:2015)中,无菌气氛at的清洁度例如为class6至class8的清洁度,更优选为class7以下的清洁度。此外,class6的清洁度是与美国联邦标准fed
‑
std 209e的等级1000相当的清洁度,class7的清洁度是与美国联邦标准fed
‑
std 209e的等级10000相当的清洁度,class8的清洁度是与美国联邦标准fed
‑
std 209e的等级100000相当的清洁度。
[0088]
(蚕饲养方法)
[0089]
接下来,对第一实施方式的蚕饲养方法的一例进行说明。
[0090]
在第一步骤st1中,在第一饲养容器c1内饲养多个蚕。第一步骤st1是第一蚕饲养工序。在第一蚕饲养工序中,例如,在第一饲养容器c1内集中饲养多个蚕a。
[0091]
在第二步骤st2中,向第二饲养容器c2移载第一饲养容器c1内的多个蚕。该移载使用蚕移载装置10来执行。
[0092]
第二步骤st2也可以具有:将第一饲养容器c1搬运到蚕移载区域ar的第一搬运工序;将第二饲养容器c2搬运到蚕移载区域ar的第二搬运工序;以及使用蚕移载装置10将多个蚕a从第一饲养容器c1移载到第二饲养容器c2的移载工序。
[0093]
第一搬运工序例如使用第一饲养容器搬运装置40来执行。第二搬运工序例如使用第二饲养容器搬运装置20来执行。第二搬运工序可以在第一搬运工序之前执行,也可以在第一搬运工序之后执行,还可以与第一搬运工序同时执行。
[0094]
在图1所记载的例子中,第二饲养容器c2包括单独饲养用的多个饲养室sp。在该情况下,第二步骤st2(蚕移载工序)也可以包括将在第一饲养容器c1内饲养后的多个蚕a分别移载到多个饲养室sp的步骤。在图1所记载的例子中,蚕移载装置10将在第一饲养容器c1内集中饲养后的多个蚕a分别移载到单独饲养用的多个饲养室sp。因此,不会使杂菌混入到蚕的饲养环境,能够顺畅地执行从集中饲养向单独饲养的切换。此外,由蚕移载装置10执行的蚕移载工序(即,将蚕a从第一饲养容器c1移载到第二饲养容器c2的蚕移载工序)也可以包括将第一饲养容器c1内的蚕移载到第二饲养容器c2内的饲料支撑部pl(参照图14)的步骤。代替地,由蚕移载装置10执行的蚕移载工序(即,将蚕a从第一饲养容器c1移载到第二饲养容器c2的蚕移载工序)也可以包括:将第一饲养容器c1内的蚕移载到第二饲养容器c2外的饲料支撑部pl(参照图5)的步骤;以及将支撑有蚕a的饲料支撑部pl插入到第二饲养容器c2内的步骤。
[0095]
在执行第二步骤st2后,将移载有多个蚕a的第二饲养容器c2从蚕移载区域ar搬运到第二饲养容器保管区域ar2。该搬运例如使用第二饲养容器搬运装置20来执行。
[0096]
在第三步骤st3中,在第二饲养容器c2内饲养多个蚕a。第三步骤st3是第二蚕饲养工序。在第二蚕饲养工序中,例如,在独立的饲养室sp内单独饲养多个蚕a的各个蚕a。
[0097]
在第一实施方式的蚕饲养方法中,由蚕移载装置10进行蚕从第一饲养容器c1向第二饲养容器c2的移载。因而,能够自动化地进行蚕从第一饲养容器c1向第二饲养容器c2的移载。其结果,提高蚕的饲养效率。并且,由于由蚕移载装置10进行蚕的移载,所以实质上杂菌不会混入到蚕的饲养环境。
[0098]
并且,在第一实施方式中,当在第一饲养容器c1内集中饲养多个蚕a、在第二饲养容器c2内单独饲养多个蚕a的各个蚕的情况下,能够将日龄较小的蚕在小空间内高效地集中饲养,而且能够将日龄较大的蚕在抑制了应力的状态下单独饲养。因而,在第一实施方式中,能够使蚕饲养的省空间化、蚕饲养的高效化、以及蚕的应力抑制并存。再有,当在单独饲养用的饲养室内使蚕形成蚕茧时,能够使形成蚕茧的场所局部化。在该情况下,蚕茧的回收(例如,利用机器人进行的蚕茧的回收)变得容易。
[0099]
[第二实施方式]
[0100]
参照图3至图16,对第二实施方式的蚕饲养系统1b及蚕饲养方法进行说明。图3是示意性地示出第二实施方式的蚕饲养系统1b的图(示意性地示出周转箱2的内部的状况的
简要俯视图)。图4是示意性地示出第二实施方式的蚕饲养系统1b的简要立体图。图5是示意地示出饲料供给装置60的一例的图。图6是示意性地示出第一饲养容器c1的一例的简要立体图。图7是示意性地示出分隔部件移动装置70的一例的图。图8是示出第一饲养工序的一例的流程图。图9是示意性地示出第一饲养工序的一例的图。图10是示意性地示出第一饲养容器c1的一例的简要立体图。图11是示意性地示出蚕卵移载装置80的一例的简要剖视图。图12是示意性地示出蚕卵移载装置80的一例的简要主视图。图13是示意性地示出第二实施方式的蚕饲养系统1b的图。图14是示意性地示出第二饲养容器c2的一例的简要立体图。图15是示意性地示出第二饲养容器c2的一例的简要立体图。图16是示出第二实施方式的蚕饲养方法的一例的流程图。
[0101]
第二实施方式的蚕饲养系统1b包括配置构成蚕饲养系统1b的多个装置中的至少一个的周转箱2。在第二实施方式中,以与第一实施方式的不同点为中心进行说明,省略对在第一实施方式中已说明的事项的重复说明。因此,在第二实施方式中,即使未明确地说明,当然也能够将在第一实施方式中已说明的事项应用于第二实施方式。这在其它实施方式中也是相同的。
[0102]
蚕饲养系统1b例如具备蚕移载装置10、第一饲养容器搬运装置40、第二饲养容器搬运装置20、控制装置30中的至少1个。关于蚕移载装置10、第一饲养容器搬运装置40、第二饲养容器搬运装置20、控制装置30,在第一实施方式中已说明,因此省略对这些构成要素的重复说明。
[0103]
在图3所记载的例子中,蚕饲养系统1b具备两个周转箱2(更具体为第一周转箱2a、第二周转箱2b)。但是,蚕饲养系统1b所具备的周转箱2的个数也可以是1个或3个以上。
[0104]
在图3所记载的例子中,在周转箱2(更具体为第二周转箱2b)内配置有第二饲养容器搬运装置20。周转箱2能够规定实质上的封闭空间(更具体为无菌气氛at)。因此,当在周转箱2内配置有第二饲养容器搬运装置20时,杂菌难以混入到第二饲养容器c2的搬运路径。
[0105]
在将搬运装置设置在封闭空间内的情况下,搬运装置一般设置在规定封闭空间的建筑物内。相对于此,在第二实施方式中,在周转箱2内配置第二饲养容器搬运装置20等搬运装置。周转箱2即使在配置于室外的情况下,也能够规定实质上的封闭空间。因此,不需要为了配置搬运装置而新建设建筑物。并且,即使在将周转箱2配置在已有的建筑物内的情况下,由于周转箱2规定实质上的封闭空间,所以也不对该已有的建筑物要求较高的密闭度。并且,由于周转箱(container)2能够由车辆、船舶等搬运,所以周转箱2的配置自由度较高。并且,也容易使一次配置在预定场所的周转箱移动到其它场所。
[0106]
周转箱2例如是根据iso668(例如iso668:1995、iso668:2005、iso668:2013等)而标准化的可移动式周转箱。周转箱2例如是45英尺周转箱(iso668的“1eee”周转箱、“1ee”周转箱等)、40英尺周转箱(iso668的“1aaa”周转箱、“1aa”周转箱、“1a”周转箱、“1ax”周转箱等)、30英尺周转箱(iso668的“1bbb”周转箱、“1bb”周转箱、“1b”周转箱、“1bx”周转箱等)、20英尺周转箱(iso668的“1cc”周转箱、“1c”周转箱、“1cx”周转箱等)、10英尺周转箱(iso668的“1d”周转箱、“1dx”周转箱等)、6.5英尺周转箱(iso668的“1e”周转箱等)、5英尺周转箱(iso668的“1f”周转箱等)。以下,在本说明书中,将根据iso668而标准化的可移动式周转箱称为“iso周转箱”。
[0107]
(第一周转箱2a)
[0108]
在图1所记载的例子中,蚕饲养系统1b具有第一周转箱2a。第一周转箱2a例如是iso周转箱。第一周转箱2a的长度例如为45英尺、40英尺、30英尺、20英尺、10英尺、6.5英尺、或者5英尺。
[0109]
在图1所记载的例子中,第一周转箱2a具有第一饲养容器保管区域ar1。在图1所记载的例子中,沿第一周转箱2a的外壁wa的内表面ws配置有绝热材料91。并且,在第一周转箱2a配置有调整第一周转箱2a内的温度的空调装置92。
[0110]
在蚕饲养系统1b具备具有第一饲养容器保管区域ar1的第一周转箱2a、绝热材料91、空调装置92的情况下,能够将第一饲养容器c1内的蚕饲养环境设定为适当的环境。空调装置92可以是能够调整温度的空调装置,也可以是能够调整温度及湿度的空调装置。由空调装置92将第一饲养容器保管区域ar1的温度例如维持在摄氏20度以上且摄氏35度以下、或者摄氏25度以上且摄氏30度以下。
[0111]
若空调装置92工作,则第一周转箱2a内的压力设定为比第一周转箱2a外的压力高。第一周转箱2a内的压力与第一周转箱2a外的压力的压力差例如为10pa(帕斯卡)以上、100pa以上、1000pa以上、3000pa以上、或者5000pa以上。将第一周转箱2a内的压力设定为比第一周转箱2a外的压力高,从而能够降低杂菌混入到第一周转箱2a内的风险。
[0112]
若空调装置92工作,则第一饲养容器保管区域ar1内的压力优选设定为比第一周转箱2a内的第一饲养容器保管区域ar1外的区域的压力高。两个区域间的压力差例如为10pa(帕斯卡)以上、100pa以上、1000pa以上。将第一饲养容器保管区域ar1内的压力设定为比第一饲养容器保管区域ar1外的区域的压力高,从而能够降低杂菌混入到第一饲养容器保管区域ar1内的风险。为了使第一饲养容器保管区域ar1内的压力比第一饲养容器保管区域ar1外的区域的压力高,空调装置92的空气供给口92a也可以配置于第一饲养容器保管区域ar1。
[0113]
空调装置92具备:从第一周转箱2a外向第一周转箱2a内供给空气的风扇921;使该空气的温度上升或下降的换热器922;以及从该空气中除去杂菌的过滤器923(例如hepa过滤器)。
[0114]
空调装置92也可以具备:使第一周转箱2a内的空气在第一周转箱2a内循环的循环流路;以及配置于循环流路的过滤器924(例如hepa过滤器)。在空调装置92具备循环流路和过滤器924的情况下,侵入到第一周转箱2a内的杂菌由过滤器924除去。
[0115]
(第二周转箱2b)
[0116]
在图3所记载的例子中,蚕饲养系统1b具有第二周转箱2b。第二周转箱2b例如是iso周转箱。第二周转箱2b的长度例如为45英尺、40英尺、30英尺、20英尺、10英尺、6.5英尺、或者5英尺。
[0117]
在图3所记载的例子中,第二周转箱2b具有第二饲养容器保管区域ar2。在图3所记载的例子中,沿第二周转箱2b的外壁wa的内表面ws配置有绝热材料91。并且,在第二周转箱2b配置有调整第二周转箱2b内的温度的空调装置92。配置于第二周转箱2b的空调装置92是与配置于第一周转箱2a的空调装置92相同的空调装置。与配置于第一周转箱2a的空调装置92相同,配置于第二周转箱2b的空调装置92具备风扇921、换热器922、过滤器(923、924)等。由空调装置92将第二饲养容器保管区域ar2的温度例如维持在摄氏20度以上且摄氏35度以下、或者摄氏25度以上且摄氏30度以下。
[0118]
若空调装置92工作,则第二周转箱2b内的压力设定为比第二周转箱2b外的压力高。第二周转箱2b内的压力与第二周转箱2b外的压力的压力差例如为10pa(帕斯卡)以上、100pa以上、1000pa以上、3000pa以上、或者5000pa以上。
[0119]
若空调装置92工作,则第二饲养容器保管区域ar2内的压力优选设定为比第二周转箱2b内的第二饲养容器保管区域ar2外的区域的压力高。两个区域之间的压力差例如为10pa(帕斯卡)以上、100pa以上、1000pa以上。为了使第二饲养容器保管区域ar2内的压力比第二饲养容器保管区域ar2外的区域的压力高,空调装置92的空气供给口92a也可以配置于第二饲养容器保管区域ar2。
[0120]
在图3所记载的例子中,蚕饲养系统1b具备:具有第一饲养容器保管区域ar1的第一周转箱2a;以及具有第二饲养容器保管区域ar2的第二周转箱2b。并且,第二周转箱2b是与第一周转箱2a不同的周转箱。在该情况下,蚕饲养系统1b能够独立地设定用于饲养日龄相对较小的蚕的饲养环境(第一周转箱2a)、以及用于饲养日龄相对较大的蚕的饲养环境(第二周转箱2b)。例如,关于日龄相对较小的蚕,通过进行集中饲养,能够在较小的空间内饲养大量的蚕。另一方面,关于日龄相对较大的蚕,通过进行单独饲养,能够实现对蚕作用的应力的降低。
[0121]
此外,关于日龄相对较大的蚕,需要相对较大的饲养空间。因此,具有第二饲养容器保管区域ar2的第二周转箱2b的尺寸也可以是比具有第一饲养容器保管区域ar1的第一周转箱2a的尺寸大的尺寸。代替地或附加地,也可以是以具有第二饲养容器保管区域ar2的第二周转箱2b的个数比具有第一饲养容器保管区域ar1的第一周转箱2a的个数多的方式配置多个周转箱2。例如,也可以连结1个第一周转箱2a和2个以上第二周转箱2b。与第一周转箱2a连结的第二周转箱2b的数量也可以是3个以上、5个以上、或者10个以上。
[0122]
(周转箱连结部95)
[0123]
在图3所记载的例子中,蚕饲养系统1b具备将第一周转箱2a与第二周转箱2b连结的周转箱连结部95。由于周转箱连结部95的存在,抑制杂菌向第一周转箱2a或第二周转箱2b的侵入。更具体而言,在第一周转箱2a与第二周转箱2b之间搬运第一饲养容器c1、第二饲养容器c2等时,有杂菌从第一周转箱2a的开口部或第二周转箱2b的开口部侵入的担忧。在图3所记载的例子中,由于第一周转箱2a与第二周转箱2b由周转箱连结部95连结(更具体而言,由于第一周转箱2a的开口部和第二周转箱2b的开口部由周转箱连结部95覆盖),所以能够降低杂菌从上述开口部侵入的风险。周转箱连结部95可以由乙烯等合成树脂制的挠性部件构成,也可以由金属板等刚性部件构成,还可以由挠性部件和刚性部件的组合构成。
[0124]
在图3所记载的例子中,在第一周转箱2a的开口部配置有第一门dr1,在第二周转箱2b的开口部配置有第二门dr2。但是,也可以省略第一门dr1和/或第二门dr2。
[0125]
(饲料供给装置60)
[0126]
在图3所记载的例子中,蚕饲养系统1b具备饲料供给装置60。饲料供给装置60是向第一饲养容器c1或第二饲养容器c2供给饲料(蚕的饲料)的装置。在蚕饲养系统1b具备饲料供给装置60的情况下,能够自动化地进行饲料向第一饲养容器c1或第二饲养容器c2的供给。在该情况下,在供给饲料时,能够抑制杂菌混入到蚕的饲养环境。
[0127]
在图3所记载的例子中,饲料供给装置60配置在第一周转箱2a内。代替地或附加地,饲料供给装置60也可以配置在第二周转箱2b内。在饲料供给装置60配置在周转箱2内的
情况下,在供给饲料时,能够更有效地抑制杂菌混入到蚕的饲养环境。但是,在蚕饲养系统1b不具有上述周转箱2的情况下,饲料供给装置60也可以配置于与周转箱2不同的任意场所。
[0128]
参照图5,对饲料供给装置60的一例进行说明。饲料供给装置60例如具备饲料储存容器61、喷嘴部件62、移动装置63、饲料供给管64以及饲料供给泵65。
[0129]
饲料储存容器61是用于暂时收纳蚕的饲料的容器。例如向饲料储存容器61投入桑叶f1(更具体为桑叶的粉末)、豆渣f2以及水。在图5所记载的例子中,从桑叶容器向饲料储存容器61投入桑叶f1,从豆渣容器向饲料储存容器61投入豆渣f2。该投入可以由桑叶供给装置和/或豆渣供给装置自动地进行,也可以通过手动作业进行。
[0130]
在图5所记载的例子中,供水管67与饲料储存容器61连接。而且,使用供水管67来自动地执行向饲料储存容器61的供水。在图5所记载的例子中,在供水管67配置有开闭阀671及过滤器672。开闭阀671与控制装置30通过有线或无线以能够传递信号的方式连接,开闭阀671基于来自控制装置30的指令而开闭。在开闭阀671处于打开状态时,向饲料储存容器61供给水,在开闭阀处于关闭状态时,不向饲料储存容器61供给水。过滤器672从水中除去异物或杂菌。
[0131]
在图5所记载的例子中,在饲料储存容器61内搅拌被投入到饲料储存容器61的桑叶、豆渣以及水。该搅拌通过由马达m1驱动的搅拌装置611进行。马达m1与控制装置30通过有线或无线以能够传递信号的方式连接,马达m1基于来自控制装置30的指令而驱动。若马达m1驱动,则搅拌装置611搅拌含有桑叶、豆渣以及水的混合饲料。
[0132]
由饲料供给泵65从饲料储存容器61朝向喷嘴部件62供给含有桑叶、豆渣以及水的混合饲料(更具体为揉合饲料)。在图5所记载的例子中,饲料供给泵65也可以包括螺旋输送机或蛇形泵。在图5所记载的例子中,饲料供给泵65包括马达m2以及由马达m2驱动的旋转轴651。饲料供给泵65也可以包括安装于旋转轴651的叶片部件652。代替地或附加地,旋转轴651也可以是非直线状的旋转轴(例如螺旋形状的旋转轴)。在该情况下,也可以省略叶片部件652。
[0133]
马达m2与控制装置30通过有线或无线以能够传递信号的方式连接,马达m2基于来自控制装置30的指令而驱动。若驱动马达m2,则旋转轴651旋转。其结果,旋转轴651或安装于旋转轴651的叶片部件652从饲料供给泵65的上游侧朝向饲料供给泵65的下游侧推出饲料(揉合饲料)。此外,在图5所记载的例子中,饲料储存容器61的排出口与饲料供给泵65的上游侧连接。然后,向饲料供给泵65的上游侧供给从饲料储存容器61的排出口排出的饲料(揉合饲料)。并且,在图5所记载的例子中,从饲料供给泵65排出的饲料经由饲料供给管64向喷嘴部件62供给。
[0134]
饲料供给管64可以是刚体管,也可以是挠性管,并且也可以一部分是刚体管而另一部分是挠性管。
[0135]
在图5所记载的例子中,饲料供给管64是将饲料储存容器61与喷嘴部件62连结的管。上述饲料供给泵65配置在饲料供给管64的中途。
[0136]
在图5所记载的例子中,在饲料供给管64配置有开闭阀641。开闭阀641与控制装置30通过有线或无线以能够传递信号的方式连接,开闭阀641基于来自控制装置30的指令而开闭。在开闭阀641处于打开状态时,向喷嘴部件62
‑
1供给饲料,在开闭阀641处于关闭状态
时,不向喷嘴部件62
‑
1供给饲料。
[0137]
在图5所记载的例子中,饲料供给管64包括主管64m和第一分支管64d。在第一分支管64d配置有上述的开闭阀641,第一分支管64d与上述的喷嘴部件62
‑
1连接。
[0138]
饲料供给管64也可以包括第二分支管64e。在图5所记载的例子中,在第二分支管64e配置有开闭阀643,第二分支管64e与第二喷嘴部件62
‑
2连接。开闭阀643与控制装置30通过有线或无线以能够传递信号的方式连接,开闭阀643基于来自控制装置30的指令而开闭。
[0139]
在图5所记载的例子中,主管64m与第一分支管64d经由分支部d1连接。并且,在图5所记载的例子中,主管64m与第二分支管64e经由分支部d2连接。
[0140]
在图5所记载的例子中,饲料供给管64具备返回管64r。在饲料供给管64具备返回管64r的情况下,在主管64m流动的饲料中未被供给到喷嘴部件62的剩余饲料经由返回管64r而返回到饲料储存容器61。在图5所记载的例子中,饲料供给管64中的分支部d1与饲料储存容器61之间的部分构成返回管64r。也可以在返回管64r配置有开闭阀645。
[0141]
喷嘴部件62(喷嘴部件62
‑
1或第二喷嘴部件62
‑
2)具备吐出饲料的开口62h。在图5所记载的例子中,喷嘴部件62
‑
1具备包括第一喷嘴621和第二喷嘴622的多个喷嘴。第一喷嘴621的吐出部(第一开口)的开口面积(或直径)比第二喷嘴622的喷出部(第二开口)的开口面积(或直径)小。并且,第二喷嘴622的吐出部(第二开口)的开口面积(或直径)比第三喷嘴623的吐出部(第三开口)的开口面积(或直径)小。喷嘴部件62
‑
1例如具备根据来自控制装置30的指令而工作的切换阀620。切换阀620选择性地向多个喷嘴(621、622、623)中的一个喷嘴供给饲料。更具体而言,若基于来自控制装置30的指令,切换阀620以使饲料供给管64与第一喷嘴621连通的方式进行工作,则从第一喷嘴621的开口吐出饲料。并且,若基于来自控制装置30的指令,切换阀620以使饲料供给管64与第二喷嘴622连通的方式进行工作,则从第二喷嘴622的开口吐出饲料。从第二喷嘴622吐出的饲料比从第一喷嘴621吐出的饲料粗。并且,若基于来自控制装置30的指令,切换阀620以使饲料供给管64与第三喷嘴623连通的方式进行工作,则从第三喷嘴623的开口吐出饲料。从第三喷嘴623吐出的饲料比从第二喷嘴622吐出的饲料粗。
[0142]
在图5所记载的例子中,第二喷嘴部件62
‑
2包括一个喷嘴。从第二喷嘴部件62
‑
2的喷嘴吐出的饲料比从喷嘴部件62
‑
1的喷嘴(例如第一喷嘴621、第二喷嘴622或者第三喷嘴623)吐出的饲料粗。代替地,也可以是从第二喷嘴部件62
‑
2的喷嘴吐出的饲料的粗细与从第三喷嘴623吐出的饲料的粗细为相同程度。
[0143]
移动装置63是使喷嘴部件62相对于饲料支撑部pl相对移动的装置。在图5所记载的例子中,移动装置63是使喷嘴部件62移动的喷嘴移动装置。代替地,移动装置63也可以是使饲料支撑部pl移动的装置。
[0144]
移动装置63与控制装置30通过有线或无线以能够传递信号的方式连接,移动装置63基于来自控制装置30的指令进行动作。移动装置63基于来自控制装置30的指令,三维地变更喷嘴部件62的位置。在图5所记载的例子中,移动装置63包括机器人手臂630。
[0145]
在图5所记载的例子中,移动装置63(更具体为移动装置63
‑
1)使喷嘴部件62
‑
1相对于饲料支撑部pl相对移动。饲料支撑部pl例如是配置在第一饲养容器c1内的饲料支撑部。饲料支撑部pl优选由网眼状的部件(换言之,网状的部件)构成。在该情况下,蚕粪经由
网眼状的部件的各开口向饲料支撑部pl的下方落下。因而,在饲料支撑部pl的上方的区域,蚕的饲养环境难以变差。
[0146]
在图5所记载的例子中,移动装置63(更具体为第二移动装置63
‑
2)使第二喷嘴部件62
‑
2相对于饲料支撑部pl相对移动。饲料支撑部pl例如是配置在第二饲养容器c2内的饲料支撑部。饲料支撑部pl优选由网眼状的部件(换言之,网状的部件)构成。在该情况下,蚕粪经由网眼状的部件的各开口向饲料支撑部pl的下方落下。因而,在饲料支撑部pl的上方的区域,蚕的饲养环境难以变差。
[0147]
(分隔部件p)
[0148]
在图5所记载的例子中,在第一饲养容器c1的内部配置有分隔部件p。如图6所示,分隔部件p(更具体为第一分隔部件p1)是将第一饲养容器c1内的空间分隔为培育蚕的第一区域r1和限制了蚕的进入的第二区域r2(即,蚕无法进入的区域)的部件。分隔部件p的位置能够在分隔第一区域r1和第二区域r2的第一位置(参照图6的上侧的图)与解除分隔部件的分隔状态的第二位置(参照图6的下侧的图)之间进行位置变更。第一位置(换言之,分隔位置)例如是分隔部件p配置在第一饲养容器c1内时的分隔部件p的位置。第二位置(换言之,非分隔位置)例如是从第一饲养容器c1拆下分隔部件p时的分隔部件p的位置。
[0149]
(分隔部件移动装置70)
[0150]
在图7所记载的例子中,蚕饲养系统1b具备使配置于第一饲养容器c1的分隔部件p移动的分隔部件移动装置70。分隔部件移动装置70例如使分隔部件p从第一饲养容器c1内的第一位置移动到第一饲养容器c1外的第二位置。
[0151]
在图7所记载的例子中,分隔部件移动装置70包括分隔部件保持部71和保持部移动装置72。分隔部件保持部71是能够保持分隔部件p的部分。分隔部件保持部71也可以具备第一把持部71a和第二把持部71b。在该情况下,通过减小第一把持部71a与第二把持部71b之间的间隔,分隔部件保持部71能够把持分隔部件p。代替地,分隔部件保持部71也可以具备能够悬挂分隔部件p的钩状部71c(需要时参照图5)。
[0152]
保持部移动装置72例如包括机器人手臂。保持部移动装置72的机器人手臂可以是图5所记载的移动装置63
‑
1的机器人手臂630,也可以是与移动装置63
‑
1的机器人手臂630不同的机器人手臂。此外,分隔部件移动装置70只要是能够使分隔部件p移动的装置即可,其形状及构造没有特别限制。
[0153]
分隔部件移动装置70与控制装置30通过有线或无线以能够传递信号的方式连接,分隔部件移动装置70基于来自控制装置30的指令进行动作。更具体而言,分隔部件移动装置70的分隔部件保持部71基于来自控制装置30的指令来保持分隔部件p。之后,分隔部件移动装置70的保持部移动装置72基于来自控制装置30的指令,使分隔部件保持部71在从第一位置朝向第二位置的方向上移动。这样,从第一饲养容器c1拆下分隔部件p。
[0154]
(第一蚕饲养工序)
[0155]
参照图8及图9,对在第一饲养容器c1内饲养多个蚕a的第一饲养工序(上述的第一步骤st1)的一例更详细进行说明。
[0156]
在步骤st201中,在配置于第一饲养容器c1内的第一分隔部件p1的一方侧的第一区域r1饲养多个蚕。步骤st201例如在配置于第一饲养容器保管区域ar1内的第一饲养容器c1内执行。在图9的(b)所记载的例子中,在第一饲养容器保管区域ar1内收纳有多个第一饲
养容器c1。收纳在第一饲养容器保管区域ar1内的第一饲养容器c1的数量例如为10个以上、50个以上、或者100个以上。
[0157]
在步骤st201中,在第一区域r1配置有饲料f及多个蚕a。并且,在步骤st201中,在第二区域r2未配置饲料f及蚕a。
[0158]
预先向第一饲养容器c1的第一区域r1供给蚕的饲料f。饲料向第一区域r1的供给例如经由饲料供给装置60的喷嘴部件62
‑
1(更具体为上述的第一喷嘴621)进行(参照图9的(a))。向第一区域r1供给的饲料的粗细(换言之,直径)例如为3mm以下或2mm以下。第一区域r1内的多个蚕a食用第一区域r1内的饲料f而成长。此外,在饲料支撑部pl为网眼状的部件(换言之,网状的部件)的情况下,蚕粪m向饲料支撑部pl的下方落下。因而,饲料支撑部pl上的蚕的饲养环境不会变差。
[0159]
在步骤st202中,向第一分隔部件p1的另一方侧的第二区域r2供给饲料f。步骤st202例如在从第一饲养容器保管区域ar1朝向饲料供给装置60搬运第一饲养容器c1之后进行。
[0160]
饲料f向第二区域r2的供给例如经由饲料供给装置60的喷嘴部件62
‑
1(更具体为上述的第二喷嘴622)进行(参照图9的(c))。在步骤st202中,由于在第二区域r2不存在蚕a,所以在向第二区域r2供给饲料f时,蚕a不会成为障碍。此外,从第二喷嘴622供给的饲料f的粗细优选比从第一喷嘴621供给的饲料f的粗细粗。从第二喷嘴622供给的饲料f的粗细(换言之,直径)例如为6mm以下或5mm以下。
[0161]
在步骤st203中,解除由第一分隔部件p1将第一区域r1与第二区域r2分隔的状态(分隔状态)(参照图9的(d))。该解除例如通过由分隔部件移动装置70使第一分隔部件p1移动来执行。在图9的(d)所记载的例子中,该解除通过由分隔部件移动装置70从第一饲养容器c1拆下第一分隔部件p1来执行。在图9的(d)所记载的例子中,分隔部件移动装置70具备能够与分隔部件p的卡合部pa卡合的钩状部71c。代替地,分隔部件移动装置70也可以具备能够把持分隔部件p的把持部。
[0162]
若解除第一分隔部件p1的分隔状态,则第一区域r1与第二区域r2合体,由此饲养多个蚕a的区域变大。因而,对于在第一区域r1中成长了的多个蚕来说,能够提供更适当的饲养环境。
[0163]
在执行步骤st203后,向第一饲养容器保管区域ar1搬运第一饲养容器c1。在步骤st202中,向第一饲养容器c1供给新鲜的饲料f。因而,多个蚕a食用新鲜的饲料而进一步成长。
[0164]
在图9所记载的例子中,在第一饲养容器c1,除了配置有第一分隔部件p1之外,还配置有第二分隔部件p2。第二分隔部件p2是在从第一饲养容器c1拆下第一分隔部件p1之后将新的第一区域rn1(扩大后的第一区域)与新的第二区域rn2分隔的部件(参照图9的(d))。
[0165]
在第一饲养容器c1内配置有第二分隔部件p2时,在步骤st204中,向新的第二区域rn2供给饲料f。步骤st204例如在从第一饲养容器保管区域ar1朝向饲料供给装置60搬运第一饲养容器c1之后进行。
[0166]
饲料向新的第二区域rn2的供给例如经由饲料供给装置60的喷嘴部件62
‑
1(更具体为上述的第三喷嘴623)来进行(参照图9的(e))。此外,从第三喷嘴623供给的饲料f的粗细优选比从第二喷嘴622供给的饲料f的粗细粗。从第三喷嘴623供给的饲料f的粗细(换言
之,直径)例如为7mm以下。
[0167]
在步骤st205中,解除由第二分隔部件p2将新的第一区域rn1与新的第二区域rn2分隔的状态(分隔状态)(参照图9的(f))。该解除例如通过由分隔部件移动装置70使第二分隔部件p2移动来执行。在图9所记载的例子中,该解除通过由分隔部件移动装置70从第一饲养容器c1拆下第二分隔部件p2来执行。
[0168]
在图9所记载的例子中,第一饲养容器c1是托盘(换言之,上方敞开的比较浅的容器)。通过使第一饲养容器c1的上方敞开,容易从第一饲养容器c1拆下分隔部件p。
[0169]
在图9所记载的例子中,配置在第一饲养容器c1内的分隔部件p的数量为2个。代替地,配置在第一饲养容器c1内的分隔部件p的数量也可以为1个或3个以上。并且,在图6所记载的例子中,在俯视时,分隔部件p具有l字形状。但是,分隔部件p的形状并不限定于图6所记载的例子。例如,也可以如图10所示,在俯视时,分隔部件p具有方框形状。
[0170]
(蚕卵移载装置80)
[0171]
参照图11及图12,对将蚕卵移载到第一饲养容器c1(例如托盘)的蚕卵移载装置80的一例进行说明。
[0172]
蚕卵移载装置80从收纳有多个蚕卵e的容器c3向第一饲养容器c1移载蚕卵e。在蚕饲养系统1具有蚕卵移载装置80的情况下,自动化地进行将蚕卵e移载到第一饲养容器c1(例如托盘)的作业。其结果,提高蚕的饲养效率。并且,通过由蚕卵移载装置80自动地进行蚕卵e的移载,实质上杂菌不会混入到蚕的饲养环境。蚕卵移载装置80例如配置在周转箱2内(更具体为第一周转箱2a内)。在蚕卵移载装置80配置在周转箱2内的情况下,能够更进一步有效地抑制杂菌混入到蚕的饲养环境。
[0173]
在图11所记载的例子中,蚕卵移载装置80包括抽吸液体中的蚕卵e的抽吸管81、以及使抽吸管81相对于第一饲养容器c1相对移动的抽吸管移动装置86。在液体中,死亡的蚕卵e1比活着的蚕卵e2更容易浮起。因而,通过抽吸液体中的蚕卵(更具体为沉没在液体中的蚕卵),能够筛选并拾取活着的蚕卵e2。
[0174]
容器c3中的液体例如是消毒液。通过将蚕卵e浸泡在容器c3中的消毒液中,来对蚕卵e进行杀菌。在该情况下,在蚕卵e被移载到第一饲养容器c1时,降低杂菌混入到第一饲养容器c1的风险。
[0175]
此外,从容易从容器c3拾取蚕卵e的观点出发,容器c3的前端部优选具备随着朝向前端而变细的尖细形状。使容器c3的前端部具有尖细形状,从而多个蚕卵e容易聚集在容器c3的底部附近。因而,仅通过将抽吸管81插入到容器c3的底部附近(换言之,容器c3的最深部),就能够将抽吸管81的前端配置于蚕卵e的附近。
[0176]
在图11所记载的例子中,抽吸管81经由配管82与真空泵84连接。并且,在配管82配置有开闭阀83。在抽吸管81的前端位于容器c3中的液体中的状态下,通过使开闭阀83成为打开状态,来由抽吸管81抽吸1个蚕卵e。代替地,也可以通过使活塞相对于缸筒相对移动,来使抽吸管81产生抽吸力。在该情况下,也可以省略真空泵84。
[0177]
在抽吸管81抽吸到蚕卵e之后,抽吸管移动装置86使抽吸管81在从容器c3朝向第一饲养容器c1的方向上移动。若抽吸管81的前端来到第一饲养容器c1的上方时,抽吸管81释放蚕卵e。该释放可以通过向抽吸管81输送空气来执行,也可以通过使抽吸管81向大气敞开来进行。
[0178]
在图11所记载的例子中,在第一饲养容器c1配置有分隔部件p。在该情况下,蚕卵移载装置80优选为仅向分隔部件p的一方侧的区域(第一区域r1)移载蚕卵e。换言之,蚕卵移载装置80优选为不向分隔部件p的另一方侧的区域(第二区域r2)移载蚕卵e。此外,在第一饲养容器c1未配置分隔部件p时,蚕卵移载装置80将蚕卵e移载到第一饲养容器c1的任意位置即可。
[0179]
由蚕卵移载装置80进行的蚕卵e的移载既可以在将饲料f配置于第一饲养容器c1(更具体为第一区域r1)之后执行,也可以在将饲料f配置于第一饲养容器c1(更具体为第一区域r1)之前执行。
[0180]
在图11所记载的例子中,抽吸管移动装置86能够使抽吸管81沿铅垂方向(换言之,z方向)移动。并且,在图11所记载的例子中,抽吸管移动装置86能够使抽吸管81沿第一水平方向(换言之,x方向)移动。
[0181]
如图12所示,蚕卵移载装置80也可以具备多个抽吸管81。在蚕卵移载装置80具备多个抽吸管81的情况下,蚕卵移载装置80能够使多个蚕卵同时移动到第一饲养容器c1。此外,在图12所记载的例子中,蚕卵移载装置80具备6个抽吸管81。代替地,蚕卵移载装置80也可以具备1个、2个、3个、4个、5个、或者7个以上抽吸管81。
[0182]
在图12所记载的例子中,抽吸管移动装置86能够使抽吸管81沿第二水平方向(换言之,与x方向及z方向垂直的y方向)移动。在图11及图12所记载的例子中,抽吸管移动装置86能够使抽吸管81三维地移动。代替地,抽吸管移动装置86也可以能够使抽吸管81二维地移动(例如,抽吸管移动装置86能够使抽吸管81仅在沿着与xz平面平行的面的方向上移动)。
[0183]
如图13所示,蚕饲养系统1也可以具备在蚕卵移载装置80与第一饲养容器保管区域ar1之间搬运第一饲养容器c1的搬运装置41。在图13所记载的例子中,搬运装置41是与第一饲养容器搬运装置40不同的搬运装置。搬运装置41例如能够沿铅垂方向(换言之,z方向)及第一水平方向(例如x方向)搬运第一饲养容器c1。搬运装置41例如包括输送机、或者带有向搁架t1移载第一饲养容器c1的移载装置的搬运装置。
[0184]
(蚕饲养系统1的其它构成要素)
[0185]
参照图13,对蚕饲养系统1的其它构成要素进行说明。
[0186]
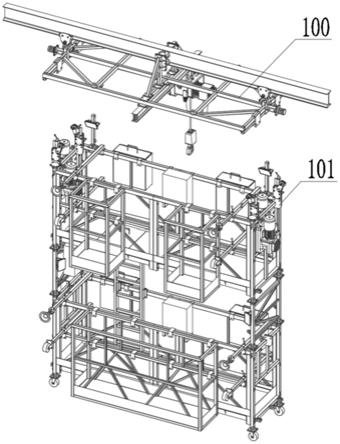
蚕饲养系统1也可以具备监视用电脑101。监视用电脑101监视各装置(10、20、30、40、41、60、70、80、92)的状态。在各装置(10、20、30、40、41、60、70、80、92)存在异常的情况下,监视用电脑101将确定存在异常的装置的信息和确定异常的种类的信息通知给作业人员。此外,在上述的实施方式中,对控制装置30控制各装置(10、20、30、40、41、60、70、80、92)的例子进行了说明。代替地,也可以是监视用电脑101与控制装置30协作来控制各装置(10、20、30、40、41、60、70、80、92)。
[0187]
蚕饲养系统1也可以具备蚕茧回收装置103。蚕茧回收装置103是从第二饲养容器c2回收蚕茧的装置(例如,从第二饲养容器c2回收蚕茧的机器人)。
[0188]
蚕饲养系统1也可以具备清洗第一饲养容器c1和/或第二饲养容器c2的清洗装置105。清洗装置105例如向第一饲养容器c1(或第二饲养容器c2)吹送空气,从第一饲养容器c1(或第二饲养容器c2)除去蚕粪或者残留饲料。从第一饲养容器c1(或第二饲养容器c2)取出来的蚕粪也可以为了作为其它家畜的饲料或药的成分利用而被回收。当在无菌环境下饲
养蚕时,蚕粪也维持无菌状态。因而,该蚕粪作为其它家畜的饲料或药的成分是适合的。
[0189]
此外,在上述的例子中,清洗装置105是使用空气的空气清洗装置。代替地或附加地,清洗装置105也可以是向第一饲养容器c1(或第二饲养容器c2)吹送水或消毒液来从第一饲养容器c1(或第二饲养容器c2)除去蚕粪或残留饲料的装置。
[0190]
由清洗装置105清洗后的第一饲养容器c1被再利用于第一饲养容器保管区域ar1内的蚕的饲养。并且,由清洗装置105清洗后的第二饲养容器c2被再利用于第二饲养容器保管区域ar2内的蚕的饲养。
[0191]
在图13所记载的例子中,监视用电脑101、蚕茧回收装置103、清洗装置105配置在第一周转箱2a内。代替地,也可以将监视用电脑101、蚕茧回收装置103、清洗装置105中的至少1个配置在第二周转箱2b内。代替地,也可以将监视用电脑101、蚕茧回收装置103、清洗装置105中的至少1个配置在周转箱2外。
[0192]
(蚕饲养方法)
[0193]
接下来,参照图13至图16,对第二实施方式的蚕饲养方法的一例进行说明。
[0194]
在第一步骤st1中,在第一饲养容器c1内饲养多个蚕。第一步骤st1是第一蚕饲养工序。
[0195]
在第一步骤st1中,首先,在步骤st101中,向第一饲养容器c1(更具体为第一区域r1)供给蚕的饲料f。步骤st101例如使用上述的饲料供给装置60来执行。更具体而言,第一喷嘴621一边相对于第一饲养容器c1(更具体为第一区域r1)相对移动,第一喷嘴621一边向第一饲养容器c1(更具体为第一区域r1)吐出饲料f。
[0196]
在步骤st102中,向第一饲养容器c1移载多个蚕卵e。步骤st102例如使用上述的蚕卵移载装置80来执行。更具体而言,搬运装置41朝向蚕卵移载装置80搬运第一饲养容器c1,之后,蚕卵移载装置80将多个蚕卵e从容器c3移载到第一饲养容器c1。此外,配置在1个第一饲养容器c1内的蚕卵e的数量例如为10个以上且1000个以下、30个以上且500个以下、或者50个以上且300个以下。第一饲养容器c1优选在移载多个蚕卵e之前预先由消毒液等杀菌。向已杀菌后的第一饲养容器c1移载已杀菌后的蚕卵e,而且将该第一饲养容器c1配置在无菌气氛at中,来维持在第一饲养容器c1内饲养的蚕卵的无菌状态。
[0197]
步骤st102可以在步骤st101之前执行,也可以在步骤st101之后执行。在执行步骤st101及步骤st102后,由搬运装置41将第一饲养容器c1搬运到第一饲养容器保管区域ar1。
[0198]
之后,执行上述的步骤st201至步骤st205。
[0199]
在步骤st201中,在第一饲养容器c1中(更具体为在第一区域r1中)饲养多个蚕a。在第一分隔部件p1配置于第一饲养容器c1的情况下,在由第一分隔部件p1规定的第一区域r1内饲养蚕的第一饲养期间是几天(例如5天)。
[0200]
在经过第一饲养期间后,从第一饲养容器保管区域ar1朝向饲料供给装置60搬运第一饲养容器c1。该搬运例如使用搬运装置41等来执行。
[0201]
在步骤st202中,向第一饲养容器c1(更具体为第二区域r2)供给蚕的饲料f。步骤st202例如使用上述的饲料供给装置60来执行。更具体而言,第二喷嘴622一边相对于第一饲养容器c1(更具体为第二区域r2)相对移动,第二喷嘴622一边向第一饲养容器c1(更具体为第二区域r2)吐出饲料f。
[0202]
在步骤st203中,第一分隔部件p1从第一位置(分隔位置)移动到第二位置(非分隔
位置)。步骤st203例如使用上述的分隔部件移动装置70来执行。
[0203]
在执行步骤st203后,由搬运装置41等将第一饲养容器c1搬运到第一饲养容器保管区域ar1。在执行步骤st202后(换言之,在第二次的饲料供给后),在由第二分隔部件p2规定的新的第一区域rn1内饲养蚕的第二饲养期间是几天(例如5天)。
[0204]
在经过第二饲养期间后,从第一饲养容器保管区域ar1朝向饲料供给装置60搬运第一饲养容器c1。该搬运例如使用搬运装置41等来执行。
[0205]
在步骤st204中,向第一饲养容器c1(更具体为新的第二区域rn2)供给蚕的饲料f。步骤st204例如使用上述的饲料供给装置60来执行。更具体而言,第三喷嘴623一边相对于第一饲养容器c1(更具体为第二区域rn2)相对移动,第三喷嘴623一边向第一饲养容器c1(更具体为第二区域rn2)吐出饲料f。
[0206]
在步骤st205中,第二分隔部件p2从第一位置(分隔位置)移动到第二位置(非分隔位置)。步骤st205例如使用上述的分隔部件移动装置70来执行。
[0207]
在执行步骤st205后,由搬运装置41等将第一饲养容器c1搬运到第一饲养容器保管区域ar1。在执行步骤st204后(换言之,在第三次的饲料供给后)在第一饲养容器c1内饲养蚕的第三饲养期间是几天(例如5天)。
[0208]
此外,在上述的例子中,每隔几天向1个第一饲养容器c1供给合计三次的饲料f。代替地,向1个第一饲养容器c1供给饲料的次数也可以为一次、两次或者四次以上。此外,在每隔几天向第一饲养容器c1供给饲料f的情况下,蚕a能够食用新鲜的饲料而成长。相对于此,在仅向第一饲养容器c1供给一次饲料f的情况下,有饲料f因干燥等而劣化的担忧。
[0209]
在第一饲养容器c1内饲养蚕的合计期间(例如,第一饲养期间、第二饲养期间、第三饲养期间的合计)为十几天(例如15天)。在该情况下,在第一饲养容器c1中,蚕从蚕卵成长到四龄幼虫。
[0210]
在执行第一步骤st1(第一饲养工序)后,在第二步骤st2中,向第二饲养容器c2移载第一饲养容器c1内的多个蚕(例如多个四龄幼虫)。该移载使用蚕移载装置10来执行。
[0211]
在第二步骤st2中,首先,向蚕移载区域ar搬运第一饲养容器c1及第二饲养容器c2。
[0212]
在图13所记载的例子中,如虚线b1所示,从第一饲养容器保管区域ar1向蚕移载区域ar搬运第一饲养容器c1。第一饲养容器c1向蚕移载区域ar的搬运也可以使用包括第一饲养容器搬运装置40的多个搬运装置来执行。在图13所记载的例子中,第一饲养容器保管区域ar1位于第一周转箱2a内,蚕移载区域ar位于第二周转箱2b内。因此,从第一周转箱2a向第二周转箱2b搬运第一饲养容器c1。第一饲养容器c1从第一周转箱2a向第二周转箱2b的搬运通过周转箱连结部95进行。
[0213]
在图13所记载的例子中,如虚线b2所示,从第二饲养容器保管区域ar2向蚕移载区域ar搬运第二饲养容器c2。第二饲养容器c2向蚕移载区域ar的搬运也可以使用包括第二饲养容器搬运装置20的多个搬运装置来执行。在图13所记载的例子中,第二饲养容器搬运装置20配置在第二饲养容器保管区域ar2内。
[0214]
在图13所记载的例子中,第二饲养容器保管区域ar2位于第二周转箱2b内,饲料供给装置60位于第一周转箱2a内。在该情况下,为了向第二饲养容器c2供给饲料f,从第二周转箱2b内的第二饲养容器保管区域ar2向第一周转箱2a内的饲料供给装置60搬运第二饲养
容器c2。该搬运例如使用包括第二饲养容器搬运装置20及第一饲养容器搬运装置40的多个搬运装置来进行。
[0215]
在图13所记载的例子中,蚕移载区域ar位于第二周转箱2b内。因此,在向第二饲养容器c2的饲养室sp供给饲料f后,从第一周转箱2a向第二周转箱2b(更具体为第二周转箱2b内的蚕移载区域ar)搬运第二饲养容器c2。
[0216]
在第一饲养容器c1及第二饲养容器c2被搬运到蚕移载区域ar之后,蚕移载装置10将蚕a从第一饲养容器c1移载到第二饲养容器c2的饲养室。此外,被移载到第二饲养容器c2的各饲养室的蚕a的数量优选为1个。通过单独饲养蚕a,能够降低蚕a的应力。
[0217]
在图14所记载的例子中,在第二饲养容器c2的第一端部ca形成有多个开口op。多个开口op分别与多个饲养室sp的入口对应。蚕移载装置10经由该开口op向各饲养室sp移载蚕a。在图14所记载的例子中,开口op形成于第二饲养容器c2的侧部。当在第二饲养容器c2收纳有多个蚕后,多个开口op由盖部件cl(需要时参照图1)覆盖。优选在盖部件cl形成有通气孔。盖部件cl是在多个开口op敞开的第一状态与多个开口op由盖部件cl封堵的第二状态之间变更状态的部件。此外,第一状态是指能够经由开口op将蚕插入到饲养室sp内的状态,第二状态是指蚕不会经由开口op向饲养室sp外脱出的状态。优选1个盖部件cl能够同时封堵多个开口op。在该情况下,能够由盖部件cl高效地封堵多个开口op。
[0218]
各饲养室sp的形状例如是细长形状。更具体而言,饲养室sp的进深是饲养室sp的高度的2倍以上,饲养室sp的进深是饲养室的宽度的2倍以上。在饲养室sp的形状是细长形状的情况下,单独饲养多个蚕时的空间相对较小即可。在图14所记载的例子中,各饲养室sp的进深方向的长度(换言之,从第二饲养容器c2的第一端部ca朝向第二端部cb的方向的长度)例如为20cm以上、30cm以上、或者40cm以上。饲养室sp的长边方向优选与水平面大致平行(换言之,饲养室sp的长边方向与水平面之间所成的角度优选为20度以下)。并且,优选在饲养室sp的长边方向端部形成有上述的开口op。
[0219]
在图14所记载的例子中,第二饲养容器c2具备多个饲养室sp。第二饲养容器c2所具备的饲养室sp的数量例如为10个以上且1000个以下、30个以上且500个以下、或者50个以上且300个以下。优选在各饲养室sp内配置支撑饲料f的饲料支撑部pl。饲料支撑部pl例如由网眼状的部件(换言之,网状的部件)构成。在该情况下,蚕粪经由网眼状的部件的各开口向饲料支撑部pl的下方落下。因而,在饲料支撑部pl的上方的区域,蚕的饲养环境难以变差。
[0220]
此外,饲料支撑部pl优选沿从第二饲养容器c2的第一端部ca(换言之,第二饲养容器c2的长边方向第一端部)朝向第二端部cb(换言之,第二饲养容器c2的长边方向第二端部)的方向延伸。并且,配置在饲料支撑部pl上的饲料f优选沿从第二饲养容器c2的第一端部ca朝向第二端部cb的方向延伸。
[0221]
在图14所记载的例子中,各个饲养室sp由独立的筒状容器cy形成,该筒状容器cy的集合体构成第二饲养容器c2的至少一部分。也可以由壳体部件h包围多个筒状容器cy,来构成第二饲养容器c2。在该情况下,由筒状容器cy提供第一无菌气氛,由收纳多个筒状容器cy的壳体部件h提供第二无菌气氛,由收纳第二饲养容器c2的第二饲养容器保管区域ar2(或第二周转箱2b等周转箱2)提供第三无菌气氛。因而,能够更可靠地维持饲养室sp内的无菌状态。并且,通过阶段性地设定无菌的程度,能够高效且低成本地实现饲养室sp内的无菌
状态。
[0222]
代替地,如图15所示,也可以是各个饲养室sp由配置在壳体部件h内的分隔壁j规定。在该情况下,由分隔壁j提供第一无菌气氛,由收纳分隔壁j的壳体部件h提供第二无菌气氛,由收纳第二饲养容器c2的第二饲养容器保管区域ar2(或第二周转箱2b等周转箱2)提供第三无菌气氛。因而,能够更可靠地维持饲养室sp内的无菌状态。并且,阶段性地设定无菌的程度,能够高效且低成本地实现饲养室sp内的无菌状态。
[0223]
在图14、图15所记载的例子中,与饲养室长边方向垂直的面中的饲养室sp的截面形状是四边形。代替地,与饲养室长边方向垂直的面中的饲养室sp的截面形状也可以是六边形、八边形、或者其它多边形。再有代替地,与饲养室长边方向垂直的面中的饲养室sp的截面形状也可以是圆形。
[0224]
在图13所记载的例子中,在将多个蚕从第一饲养容器c1移载到第二饲养容器c2之后,从蚕移载区域ar向第二饲养容器保管区域ar2搬运第二饲养容器c2。该搬运使用第二饲养容器搬运装置20等来执行。并且,在将多个蚕从第一饲养容器c1移载到第二饲养容器c2之后,向清洗装置105搬运第一饲养容器c1。第一饲养容器c1在由清洗装置105清洗后,被再利用于集中饲养蚕。
[0225]
在第三步骤st3(第二饲养工序)中,在第二饲养容器c2内饲养多个蚕。在第二蚕饲养工序中,例如,在独立的饲养室sp内单独饲养多个蚕a的各个蚕a。在第二蚕饲养工序中,各个蚕从四龄幼虫成长到五龄幼虫,之后,五龄幼虫结茧。
[0226]
优选为,在五龄幼虫结茧前,空调装置92向第二饲养容器c2的第一端部ca或第二端部cb供给干燥空气。由于五龄幼虫喜欢干燥空气,所以通过向第二饲养容器c2的第一端部ca或第二端部cb供给干燥空气,五龄幼虫聚集在第一端部ca或第二端部cb。在该情况下,容易从第一端部ca或第二端部cb取出蚕茧(例如,蚕茧回收装置103、更具体为机器人容易从第一端部ca或第二端部cb取出蚕茧)。
[0227]
在五龄幼虫结茧后,从第二饲养容器保管区域ar2朝向蚕茧回收装置103搬运第二饲养容器c2。该搬运例如使用第二饲养容器搬运装置20等搬运装置来执行。
[0228]
在图13所记载的例子中,第二饲养容器保管区域ar2位于第二周转箱2b内,蚕茧回收装置103位于第一周转箱2a内。因此,从第二周转箱2b向第一周转箱2a搬运第二饲养容器c2。在图13所记载的例子中,在第一周转箱2a内的第二饲养容器c2的搬运使用第一饲养容器搬运装置40来执行。在从第二饲养容器c2取出蚕茧后,向清洗装置105搬运第二饲养容器c2。第二饲养容器c2在由清洗装置105清洗后,被再利用于单独饲养蚕。
[0229]
在第二实施方式的蚕饲养方法中,分开进行日龄相对较小的蚕的饲养和日龄相对较大的蚕的饲养,能够在相对较小的空间内高效地饲养蚕。并且,机械地自动执行蚕从第一饲养容器c1向第二饲养容器c2的移载、第一饲养容器c1或第二饲养容器c2的搬运、蚕卵向第一饲养容器c1的移载、饲料f向第一饲养容器c1或第二饲养容器c2的供给、第一饲养容器c1或第二饲养容器c2的清洗、蚕茧从第二饲养容器c2的回收中的至少1个动作(优选为所有动作)。因此,提高蚕的饲养效率,而且杂菌难以混入到蚕的饲养环境。
[0230]
此外,在第一饲养容器c1和/或第二饲养容器c2被清洗而再利用的情况下,不是从无菌气氛外向无菌气氛内(例如周转箱2内)补充第一饲养容器c1和/或第二饲养容器c2,就能够反复执行蚕的饲养。因而,降低杂菌进入到无菌气氛at内的风险。此外,也可以经由周
转箱2(更具体为第一周转箱2a)的门dr(需要时参照图4)取出由蚕茧回收装置103回收到的蚕茧。并且,饲料f和/或蚕卵e的补充也可以经由周转箱2(更具体为第一周转箱2a)的门dr来进行。从防止杂菌进入到周转箱2内的观点出发,该门dr优选为双重门。
[0231]
(蚕移载装置10)
[0232]
参照图17,对能够在实施方式的蚕饲养系统1中采用的蚕移载装置10的一例进行说明。
[0233]
在图17所记载的例子中,蚕移载装置10具有保持部件移动装置12(更具体为臂部)和把持部110。保持部件移动装置12例如是包括1个以上关节部的机器人手臂。并且,把持部110例如具有包括第一把持片111a及第二把持片111b的多个把持片111。此外,把持部110所具有的把持片111的数量可以是2个,也可以是3个以上。
[0234]
把持片111中的与蚕接触的接触部112优选由能够弹性变形的部件(弹性部件)构成。接触部112例如由硅橡胶形成。由弹性材料(例如硅橡胶)形成接触部112,能够适当地把持形状变化且运动的蚕。
[0235]
把持片111例如也可以是具有由弹性材料包围的内部空间is的把持片。在该情况下,通过向内部空间is供给空气等流体,能够驱动把持片111。在图17所记载的例子中,各把持片111具备向内部空间is供给流体的流体供给路ph。
[0236]
本发明并不限定于上述各实施方式,在本发明的技术思想的范围内,各实施方式能够适当变形或变更,这是显而易见的。并且,在各实施方式或变形例中使用的各种技术在不产生技术上的矛盾的范围内,也能够应用于其它实施方式或变形例。再有,各实施方式或变形例中的任意附加的结构能够适当省略。例如,第二实施方式所包括的各构成要素也能够在第一实施方式中采用。
[0237]
在第二实施方式中,对使用多个周转箱(2a、2b)饲养多个蚕的例子进行了说明。但是,在第二实施方式中,即使使用1个周转箱2来饲养多个蚕也是可以的。并且,在第二实施方式中,即使在与周转箱无关地设定的无菌环境内饲养多个蚕也是可以的。
[0238]
在第二实施方式中,对蚕移载装置10及第二饲养容器搬运装置20配置在第二周转箱2b内的例子进行了说明。代替地,蚕移载装置10或第二饲养容器搬运装置20也可以配置在第一周转箱2a内。再有代替地,蚕移载装置10或第二饲养容器搬运装置20也可以配置在与周转箱无关的无菌环境内。
[0239]
并且,在第二实施方式中,对第一饲养容器搬运装置40、饲料供给装置60、分隔部件移动装置70以及蚕卵移载装置80配置在第一周转箱2a内的例子进行了说明。代替地,第一饲养容器搬运装置40、饲料供给装置60、分隔部件移动装置70、或者蚕卵移载装置80也可以配置在第二周转箱2b内。再有代替地,第一饲养容器搬运装置40、饲料供给装置60、分隔部件移动装置70、或者蚕卵移载装置80也可以配置在与周转箱无关的无菌环境内。
[0240]
并且,在第二实施方式中,对从第一饲养容器c1向第二饲养容器c2移载的蚕是四龄幼虫的蚕的情况的例子进行了说明。代替地,从第一饲养容器c1向第二饲养容器c2移载的蚕例如也可以是五龄幼虫的蚕。并且,在向第二饲养容器c2移载五龄幼虫的蚕(更具体为即将结茧之前的蚕)的情况下,也可以省略在第二饲养容器c2配置饲料。在该情况下,不需要朝向饲料供给装置60搬运第二饲养容器c2。并且,在不在第二饲养容器c2配置饲料的情况下,在上述的实施方式的说明中,“饲料支撑部pl”被替换为“支撑部”。“支撑部”是能够支
撑蚕的支撑部。
[0241]
并且,在图14、图15所记载的例子中,在第二饲养容器c2的第一端部ca(第一端面)配置有蚕能够通过的op。附加地,在第二饲养容器c2的第二端部cb(第二端面)也可以配置有蚕能够通过的开口。
[0242]
[实施方式3]
[0243]
参照图18~图31,对实施方式3的自动养蚕系统、自动养蚕方法、程序以及存储介质进行说明。
[0244]
[蚕的成长]
[0245]
由于蚕卵在30度以上约在3天内孵化,所以能够调整孵化的时机。从孵化开始计算天数,管理幼虫、幼蚕(蚁蚕)、蜕皮一龄、二龄、三龄、四龄、五龄、五龄的熟蚕。大概三龄~五龄集中饲养。在1个周转箱中,能够饲养100万头左右的蚕。
[0246]
例如在第15天、从三龄向四龄蜕皮前的蚕的活动较少的时期,用拾取机器人从集中饲养容器取出蚕,将其移动到单独饲养容器。或者,也能够从蚕卵时起用单独饲养容器饲养。可以在蚕卵、幼蚕、一龄~五龄、熟蚕的任一阶段中将蚕从集中饲养容器移动到单独饲养容器。
[0247]
单独饲养容器为sus制,制造成本较高,因此希望尽量提高使用频率。为此,进行集中饲养直到熟蚕为止,从成为熟蚕起向单独饲养容器移动的话是有利的。例如,也可以在集中饲养容器中进行饲养直到在第25天变成熟蚕为止,使完成开始吐丝的准备的熟蚕移动到单独饲养容器。在该情况下,根据大量的蚕粪和进行小便的情况、体色从白变化为带黄色的透明的情况、抬头的情况等特征,通过目视或者通过对来自相机的图像进行图像识别,能够自动地检测是否完成了开始吐丝的准备。
[0248]
成为五龄的熟蚕(成熟蚕)时的特征是持续食用10天的饲料、之后小便、大量的蚕粪、从白向黄色(透明)的变化。孵化后第25天开始吐丝。在第28天开始结茧,3天左右取出蚕茧。由于以天数为基准,所以能够大致确定时期,但也可以通过传感检测来调整取出蚕茧的时期。传感检测可以是在1小时内进行1次左右的频度。由于若蚕茧完成则蚕在蚕茧中不动,所以通过向蚕茧照射光并用传感器进行观察,能够检测蚕茧完成了的情况。并且,作为相机,除了彩色相机、单色相机之外,还能够使用x射线相机、红外线相机等。
[0249]
在从成虫得到蚕卵的情况下,进行饲养直到破茧出来的成虫的蚕蛾为止。一头雌性约产卵200个。
[0250]
[关于饲料]
[0251]
若使桑叶为干燥粉末,则重量为生叶的三分之一。粉末的细度例如为80μm~100μm左右。桑叶的水分在冬天为60%、在夏天为低于70%(低出)。用热泵式干燥机经过约6小时内进行干燥直到该水分含量的70%~60%变成30%左右为止。再有,到水分含量3%为止需要干燥3天左右的时间。因此,在使水分含量从30%干燥到3%时,若在真空中一边照射微波一边搅拌使之干燥,则能够在例如20分钟左右的短时间内进行干燥。由干燥粉末整形出布丁状的鱼糕型块体。形状并不限定于鱼糕型,大小、形状也是任意的。能够在饲养箱的期望的位置,以预定的配置、预定的量来配置预定大小的饲料的块体。根据成分或比率,柔软度大致为从蛋黄酱程度到乌冬面程度为止。
[0252]
也可以用热泵式干燥机从最初到最后进行干燥。若从料斗投入调配后的饲料,则
由泵挤出,能够向饲养容器的预定场所提供期望粗细的鱼糕型块体的饲料。粗细、配比能够根据蚕的成长来变更。饲料的配合、块体的大小、粗细等的调整也自动化地进行。
[0253]
桑叶的干燥粉末通过上述制法而无菌化。作为副饲料的使从脱脂大豆、酱油、豆腐制造中产生的豆渣干燥后的饲料作为食用而被无菌化。副饲料含有氨基酸、蛋白质。再有,加入水分(水使用已杀菌后的水、无菌的水),将这三者混合而成形为布丁状的柔软的饲料块。
[0254]
饲料的配比率例如为桑粉10%、副饲料20%、水分70%左右。在使桑叶在高温下干燥的情况下,由于失去营养成分,所以优选添加辅助性的添加剂。另一方面,在使桑叶在低温下干燥的情况下,由于难以失去营养成分,所以有可能不需要辅助性的添加剂。
[0255]
关于使桑叶干燥的温度,在烘箱中的干燥(用于处理蚕茧内的蚕的烘箱)为80℃左右,热泵方式的干燥为50~60℃左右,在真空中的微波中的干燥为40℃左右,除此之外,还可以如冷冻干燥那样进行干燥及粉碎。
[0256]
由饲料供给机构向集中饲养容器自动地供给饲料。能够按照蚕的成长来调整饲料的粗细、配比。在集中饲养容器中,按照蚕的成长来改变供给饲料的位置。例如,在第5天补充饲料时,向与供给蚕卵和最初的饲料的位置相邻的位置供给预定的配比、尺寸(粗细)的饲料。并且,在第10天补充饲料时,向与在第5天配置的饲料的位置还相邻的位置供给预定的配比、尺寸(粗细)的饲料。再有,在第15天补充饲料时,向与在第10天配置的饲料的位置还相邻的位置供给预定的配比、尺寸(粗细)的饲料。这样,使供给饲料的位置错开,将蚕的位置诱导到有饲料的场所,由此能够防止蚕粪仅积存在确定的饲料的位置。
[0257]
图18是系统整体的俯视图,由第一周转箱202及第二周转箱203构成。图19是第一周转箱的俯视图,图20是第二周转箱的俯视图,图21是图20的侧视图。第一周转箱是处理用的空间,第二周转箱是培育蚕用的空间。蚕卵向集中饲养容器的投入、饲料的投入、蚕的转载等处理全部在第一周转箱中自动地进行。在第一周转箱中,饲料、蚕卵的补充等维护以外的处理是全自动的,因此能够实现无人和无菌化。除了维护以外,作业人员不会进入到第二周转箱,蚕的饲养环境始终能够实现无人和无菌化。本实施方式的特征还在于,因自动化,作业人员不进入,由此容易进行无菌化。
[0258]
第一周转箱202具备机器人手臂210、蚕卵或饲料供给位置211、蚕的拾取位置(旋转台)212、使蚕向单独饲养容器移动或者从单独饲养容器取出蚕茧的位置(能够升降)213等。在蚕卵或饲料供给位置211向饲养容器供给蚕卵或饲料。在蚕的拾取位置设有使饲养容器旋转的旋转台,从集中饲养容器拾取蚕。该拾取后的蚕向被搬运到使蚕向单独饲养容器移动的位置213的单独饲养容器移动。并且,在从单独饲养容器取出蚕茧的位置213,取出蚕在单独饲养容器内所结的茧。图22是机器人手臂210位于与本来的位置不同的位置时的照片,中央上方是蚕卵或饲料供给位置211,集中饲养容器被搬运到中央跟前,在其左上有蚕的拾取位置(旋转台)212,再有在其左上本来存在机器人手臂210。在图22的左上设有使蚕向单独饲养容器移动或者从单独饲养容器取出蚕茧的位置(能够升降)213。
[0259]
第二周转箱203具备饲养容器自动收纳机构215及饲养搁架216等。由饲养容器自动收纳机构215自动地搬运饲养容器,实现了无人化。饲养容器自动收纳机构215能够沿第二周转箱内的长度方向移动,并且能够访问第二周转箱内的所有饲养搁架216,自动地环绕饲养搁架。再有,第一周转箱与第二周转箱之间由连结输送机214连结,在第一周转箱与第
二周转箱之间,能够以无人且无菌的状态进行饲养容器的搬运。
[0260]
[蚕移动机构]
[0261]
机器人手臂210能够作为拾取蚕的拾取机器人来使用。在拾取机器人中,利用使用了软机器人技术的吸盘或手部,能够轻轻且轻柔地拾取蚕。例如,用机器人手臂前端的真空吸盘吸起三龄3cm左右的蚕。并且,例如,可以利用柔软的空气驱动的手部来把持蚕。作为手部的材料,优选粘合性硅制的柔软的材料。并且,例如,用柔软的空气驱动的手部进行把持、并且用真空吸盘吸起也是有效的。在将机器人手臂210用作蚕茧的拾取手的情况下,例如优选用空气驱动拾取手,轻柔地把持蚕茧。能够自动地更换拾取蚕的手部和拾取蚕茧的手部。
[0262]
由于在蚕的拾取位置212成为旋转台,所以能够一边使集中饲养容器旋转一边由拾取机器人拾取蚕。例如,通过单反相机的二维图像识别来判定蚕的位置。并且,通过单反相机的二维的图像识别来判定蚕茧的位置,并由蚕茧拾取用手来取出蚕茧。在蚕拾取位置有1台相机,在蚕茧拾取位置有另外的1台相机。但是,也能够使用双轴相机(立体相机)进行三维的图像识别。在使蚕向单独饲养容器移动或者从单独饲养容器取出蚕茧的位置213,单独饲养容器能够通过升降机升降。在相同位置213进行使蚕向单独饲养容器移动的处理和从单独饲养容器取出蚕茧的处理。
[0263]
图27是检测用相机的照片。检测用相机在拾取机器人的上方,例如在蚕拾取位置设有1台相机,在蚕茧拾取位置设有另外的1台相机。在相机的附近设有用于对拍摄范围进行照明的照明机构。通过对由该检测用相机得到的图像进行图像识别,来检测要拾取的蚕或蚕茧。
[0264]
[蚕卵供给机构]
[0265]
在蚕卵或饲料供给位置211,向饲养容器投入蚕卵。作为蚕卵的特征,在水中,健康的蚕卵下沉,死亡的蚕卵浮起。因此,对利用由吸管取出健康的蚕卵的机器人来向饲养容器投入蚕卵的例子进行说明。若向v槽状的消毒液槽投入蚕卵,则正常的蚕卵沉入v槽的底部。由抽吸机构(吸管状的抽吸机构,并列设置多个)抽吸沉入底部的蚕卵,并向集中饲养容器的预定场所投入蚕卵。将蚕卵排列成多列、例如6列。饲料也与蚕卵的排列平行地在该蚕卵的排列之间多列供给。消毒液例如能够使用osvan液(注册商标)。将原液稀释至1%左右。也可以是臭氧水。对蚕卵表面进行消毒。由此,蚕卵也能够成为无菌状态。
[0266]
[在周转箱中实现养蚕系统的例子]
[0267]
虽然没有特别限定,但本实施方式的自动养蚕系统能够通过收纳于2个周转箱来实现。第一周转箱是作业空间,第二周转箱成为饲养室,通过连接两者的输送机连接。利用上述周转箱,能够饲养2万头左右的蚕,若进一步扩大规模,则能够以100万头为单位进行养蚕。
[0268]
第一周转箱中的作业包括蚕卵的筛选、集中饲养容器的准备、单独饲养容器的准备、饲料的追加、蚕的拾取、从集中饲养容器向单独饲养容器的移动等。机器人手臂也能够使用多台拾取机器人。在该情况下,例如,在圆周状等环绕状的输送机的周围(内周侧、外周侧)配置多个拾取机器人,通过相机的图像识别,能够仅拾取熟蚕。通过并行处理,能够缩短拾取作业的时间。
[0269]
第二周转箱设有收纳单独饲养容器、集中饲养容器的多个饲养搁架。图29~图31示出配置于第二周转箱的饲养搁架、饲养容器自动收纳机构。图29是饲养搁架的照片。图30
是饲养容器自动收纳机构的轨道的照片。图31是饲养容器自动收纳机构的照片。饲养容器自动收纳机构设有升降机构、以及相对于饲养搁架收纳或取出饲养容器的机构。
[0270]
[无菌饲养]
[0271]
饲料、蚕卵、饲养容器、第一及第二周转箱内等全部为无菌状态,即完全无菌。周转箱内湿度为70%,防止饲料变干。饲料的水分含量为70%,之前的周转箱内湿度条件与其一致。室温优选为蚕喜欢的20~25℃。由于无菌状态,饲料难以腐烂,所以能够维持蚕的健康。为了成为无菌状态,对蚕卵的外侧进行消毒。如上所述,向v槽状的消毒液槽投入蚕卵,仅取出沉入底部的蚕卵。供给无菌的饲料,并且使饲养环境为除菌或无菌环境。例如,设为使用空气净化器的清洁室,该空气净化器使用了高效空气过滤器(hepa过滤器),能够去除1微米尺寸的垃圾。
[0272]
由于蚕卵在30度以上在3天内左右孵化,所以通过在购入蚕卵时指定孵化日,能够进行孵化日的管理。在购入蚕卵时,指定品种、个数、孵化日等。
[0273]
[饲养方法]
[0274]
定期地例如每隔5天进行喂食。向饲养容器投入蚕卵和饲料,在第5天喂食,并且在5天后喂食,再在5天后喂食,在合计15天后,在从三龄向四龄蜕皮前的不动的期间,用拾取机器人(例如抽真空的吸盘)将三龄且3cm左右的大小的蚕移至单独饲养用的管,在管内满载饲料,例如预先给予20g左右。在单独饲养容器内,在第25天吐丝,开始结茧,在3天后即在合计第28天用拾取手取出蚕茧。
[0275]
[清洗工序]
[0276]
由于蚕粪能够用作中药,所以也回收蚕粪。蚕粪从单独饲养容器的金属网的间隙落下而积存在底部,因而能够仅回收蚕粪。由于蜕皮的脱落壳、残留饲料残存在金属网之上,所以能够进行分类。集中饲养容器、单独饲养容器、分隔部件在使用后被清洗、例如自动清洗。虽然没有特别限定,但例如也能够采用利用清洗槽内的水流的自动清洗。
[0277]
由于聚集的蚕茧的回收、聚集的蚕粪的回收、聚集的残渣(食用残留、蜕皮物)的回收、饲料的补充、蚕卵的补充等也全部能够自动化地进行,所以能够实现养蚕的无人化,能够实现完全自动化的养蚕系统。但是,也可以用人手进行其中的任一个。
[0278]
蚕卵供给机构、饲料供给机构、蚕移动机构、蚕茧取出机构、饲养容器自动收纳机构以及饲养容器移动机构也全部自动化地进行,不借助人手,从而容易实现无菌化,能够降低蚕的应力。在传统养蚕中,在进入蚕蔟的时机,使上蔟时期一致是非常困难的。在本实施方式中,通过传感检测来分析上蔟时期,从而能够进行与分析结果相应的可变作业。能够进行监视(传感器)、数据分析、决策(ai的利用)、与分析结果相应的可变作业(由机器人自动化)。在三龄~五龄时,在移至单独饲养容器的情况下,不需要上蔟时期的管理。取出蚕茧的时期可以根据天数或通过传感检测来决定。在仅选择熟蚕进行捡取的情况下,即使在相同的集中饲养容器内也有发育较慢的蚕,因此为了能够调整捡取作业时期,可以预先在捡取位置附近设置能够暂时存放集中饲养容器的集中饲养容器存放部。通过使用iot技术,能够监视蚕的培育状况,实现与成长相应的作业时期的最佳化。例如,由相机监视蚕或蚕茧的状况。例如每隔1小时进行监视。
[0279]
[单独饲养容器]
[0280]
单独饲养容器呈矩阵状地例如以5层
×
10列设有饲养空间。用分隔部件将1个饲养
空间分隔为2个室。在蚕茧的取出中,在作业台上将分隔部件逐个推出到长度方向一半。例如,纵向5层横向10列,在管中央进行分隔,由网抬高底部,蚕粪积存在网的下方。中央的分隔件的周围成为弹性部件、例如海绵,若使分隔件移动一半,则刮出其中的蚕粪。与取出蚕茧的同时,完成一次清扫。在两面设有能够装卸的盖(透光性)。
[0281]
[集中饲养容器]
[0282]
集中饲养容器是大致方形有底状的容器,在中央设有防干燥用的水分供给机构。参照图22的中央下的大致方形的容器。水分供给机构能够是含浸有水分的海绵等。或者,也能够预先直接将水放入到作为水分供给机构的容器中。在集中饲养容器的上表面设有能够装卸的盖(透光性)。
[0283]
[分隔部件]
[0284]
图23是分隔部件的照片。分隔部件240插入到单独饲养容器的饲养空间。分隔部件240具有分隔部241及平面部243。分隔部41将饲养空间分隔为2个空间。平面部243成为用于饲养蚕或蚕茧的地板。在平面部243设有多个孔部,蚕粪从孔部落下,积存在饲养空间的底部与平面部243的下部之间。在分隔部241的周围设有例如由海绵等构成的弹性部件242。弹性部件242与饲养空间的内壁的形状及尺寸对应。在平面部243的两端部设有向上表面侧凸出的凸部246。
[0285]
图24是示出由分隔部件移动机构220将分隔部件240从饲养空间推出分隔部件240的长度的一半的距离的情况的图。若像这样将分隔部件240从饲养空间推出一半,则弹性部件242与饲养空间的内壁滑动接触,因而能够分开取出收纳空间内的蚕粪和蚕粪以外的残渣。图25是从单独饲养容器取出蚕茧时的照片。图25是与实际的设置位置不同的参考照片,因此与实际的配置关系不同。取出蚕茧的位置是将分隔部件240从饲养空间推出一半的位置,并且在分隔部件收纳部与单独饲养容器接触的状态下,突出的一侧的分隔部件240嵌入到分隔部件收纳部。在该状态下,蚕粪由弹性部件242刮出,之后由蚕粪回收纳器回收。另一方面,作为蚕粪以外的残渣的食用残留的饲料、蜕皮出的皮等残存在平面部243之上,因此能够分开取出蚕粪和蚕粪以外的残渣。蚕茧的取出例如能够使用图26所示的蚕茧拾取臂。
[0286]
为了使分隔部件240从图24的位置返回到饲养空间内,设于分隔部件移动机构220的爪部与凸部246卡合。由于单独饲养容器放置在升降机之上,所以能够调整其高度。单独饲养容器例如具有5层10列的合计50个饲养空间。在各层具有10个饲养空间,能够由分隔部件移动机构220的10个手臂使插入到该各层的10个收纳空间中的分隔部件240同时移动。设于分隔部件移动机构220的爪部与凸部246的卡合、以及卡合解除通过升降器的高度调整来进行。若使单独饲养容器旋转180度,则当也从相反侧从蚕的拾取位置212的两侧将分隔部件240从饲养空间推出一半时,能够也从相反侧将分隔部件240从饲养空间推出。
[0287]
[实施方式4]
[0288]
在本实施方式中,参照图31~图37,对在从集中饲养容器向单独饲养转移时与实施方式3不同地不使用拾取机器人的方法进行说明。
[0289]
从二龄(20mm左右)转移到蚕蔟(由分隔件分隔出的50mm
×
50mm左右的多个框格(升))中。即,从集中饲养移至单独饲养。
[0290]
(实施例1)
[0291]
图32中,使用漏斗(料斗)之类的例如圆锥状的器具(漏斗310),将蚕分别各1头地
放入到上蔟室容器300中。在未向各框格301各放入1头蚕的情况下,例如,在1个框格之中放入了2头的情况下、或在产生了空框格的情况下等,使用拾取机器人以向各框格中分别各放入1头蚕的方式使蚕移动。
[0292]
由于在3天左右可获得蚕茧,所以能够进行一年120次的蚕茧的生产。饲养器的施入天数较少即可。
[0293]
图33示出变形例的漏斗310a。在漏斗310a的提取口的上方设有第一闸门311,在提取口的下方设有第二闸门312,在第一闸门与第二闸门之间设有闸门室313。打开第一闸门311,例如若在1头蚕向第一闸门室移动后,立即关闭第一闸门311,由此,1头蚕向闸门室313移动。接着,若打开第二闸门312,则来自闸门室的1头蚕从漏斗310提取到1个框格301中。由此,能够针对框格301分别各收纳1头蚕。当在遮光器313设有传感器的情况下,能够根据该传感器对蚕的检测来控制第一遮光器311和第二遮光器312。由此,能够使蚕各1头地向闸门移动,能够从漏斗各1头地可靠提取蚕。
[0294]
(实施例2)
[0295]
图34中,从集中饲养容器320的上方,覆盖被分隔为多个框格331的单独移动框格330。集中饲养容器320的内侧尺寸与单独移动框格330外形尺寸大致一致。由于蚕有向上方攀登的习性和与其它蚕隔开距离的习性,所以1头蚕自主地进入到框格部件的各框格之中。
[0296]
(实施例2的变形例2
‑
1)
[0297]
代替方格状的框格部件,例如使用将多个波状的分隔部件层叠而成的部件、即使用设有多个波型框格333的波型单独移动框格333。图35的波型单独移动框格333与制造图34的单独移动框格330之类的矩形的框格部件相比,层叠分隔部件来制造的话更简单,因此装置变得廉价。分隔部件不限定于波型,例如也可以是连续的矩形。
[0298]
(实施例2的变形例2
‑
2)
[0299]
例如如图36的(b)所示,使用将金属网335(图36的(a))弯曲成形为连续的波型形状的金属网型单独移动框格336(图36的(b))来代替方格状的单独移动框格330,从而能够对蚕进行上蔟。熟蚕有在立体形状的场所结茧的习性。若利用该蚕的习性,则蚕将形成于金属网型单独移动框格336的金属网间的立体的空间识别为立体形状,蚕在该空间结茧。
[0300]
(实施例2的变形例2~3)
[0301]
如图37所示,利用蚕聚集在有饲料的场所的习性,分散配置糊状的饲料,由此在集中饲养容器320中使蚕整体分散配置,进而在从上覆盖单独移动框格330时,能够进行诱导以使蚕各1头地向框格331移动。
[0302]
图37的(a)是在第一分隔件321内饲养刚从蚕卵孵出的较小的蚕时的图。饲料325分散配置在第一分隔件321内。蚕聚集在分散的饲料处,结果能够分散饲养蚕。
[0303]
图37的(b)是在蚕变大时拆下第一分隔件321且在第二分隔件322内饲养的情况的说明图。通过使饲料均等地分散在第二分隔件内,而使蚕聚集于该饲料,结果能够在第二分隔件322内分散饲养蚕。
[0304]
图37的(c)中,若蚕进一步长大,则拆下第二分隔件322,在集中饲养容器320整体饲养蚕。在集中饲养容器320内均等地分散配置糊状的饲料。由于蚕会聚集于饲料,结果蚕会大致均等地分散在集中饲养容器320内。当在该状态下蚕成熟时,若从集中饲养容器320的上方覆盖单独移动框格330,则能够将大致均等地分散的熟蚕各1头地诱导到框格331。
[0305]
(实施例3)
[0306]
当在集中饲养容器320内饲养的情况下,在集中饲养容器320内,除了积存有蚕之外还积存有蚕粪和饲料残留等残渣。为了进行上蔟而想要仅取出熟蚕,但若预要从容器直接取出熟蚕,则无论如何残渣都会一起出来。因此,通过使用蚕以自身力量在集中饲养容器320内停留的程度的输出的真空抽吸嘴,能够仅吸取集中饲养容器320内的残渣,从而集中地仅取出熟蚕。若仅取出熟蚕,则能够将蚕集中地投入到图32的实施例的漏斗310。再有,即使不使用漏斗310,由于蚕有与其它蚕隔开距离的性质,所以仅通过在上蔟室容器300之上散开熟蚕,蚕就能自主地分别各1头地进入到各框格301,并能够那里结茧。此处,对将蚕散开在上蔟室容器300的例子进行了说明,但本实施例并不限定于此,例如通过将蚕散开在图36的(b)的金属网型单独移动框格、用竹子编织而成的网状的框格部件等,也能够使蚕自主地各1头地进入到各框格或单独空间,在此结茧。
[0307]
在上述各实施例、变形例中,对利用蚕的习性而蚕自主地各1头地进入到各框格的装置进行了说明,蚕的习性为:
[0308]
·
蚕要相互隔开距离的习性;
[0309]
·
想要向上攀登的习性;以及
[0310]
·
熟蚕在三维空间内结茧、在二维空间内平面地吐丝的习性等,
[0311]
但并不限定于所有蚕都能够通过自身的行动来上蔟。由于有几头无法通过蚕自身的行动来上蔟,所以对于这样的蚕,例如能够通过图28所示的机器人手臂而强制地上蔟。并且,若使用多个机器人手臂,则能够进一步缩短使蚕上蔟的处理时间。
[0312]
以上,对本发明的实施方式的自动养蚕系统、自动养蚕方法、程序以及存储介质进行了说明,但这些实施方式是为了说明用于将本发明的技术思想具体化的自动养蚕系统、自动养蚕方法、程序以及存储介质而示例的,并不意图将本发明限定于该实施方式例。本发明也能够同等地应用于将各实施方式、各实施例乃至变形例组合后的实施方式、进行了各种变更后的实施方式。
[0313]
符号说明
[0314]
1、1a、1b—蚕饲养系统,2—周转箱,2a—第一周转箱,2b—第二周转箱,10—蚕移载装置,11—蚕保持部件,11a—第一把持部,11b—第二把持部,11c—真空吸附部,12—保持部件移动装置,13—相机,20—第二饲养容器搬运装置,30—控制装置,40—第一饲养容器搬运装置,41—搬运装置,60—饲料供给装置,61—饲料储存容器,62、62
‑
1—喷嘴部件,62
‑
2—第二喷嘴部件,62h—开口,63、63
‑
1—移动装置,63
‑
2—第二移动装置,64—饲料供给管,64d—第一分支管,64e—第二分支管,64m—主管,64r—返回管,65—饲料供给泵,67—供水管,70—分隔部件移动装置,71—分隔部件保持部,71a—第一把持部,71b—第二把持部,71c—钩状部,72—保持部移动装置,80—蚕卵移载装置,81—抽吸管,82—配管,83—开闭阀,84—真空泵,86—抽吸管移动装置,91—绝热材料,92—空调装置,92a—空气供给口,95—周转箱连结部,101—监视用电脑,103—蚕茧回收装置,105—清洗装置,110—把持部,111—把持片,111a—第一把持片,111b—第二把持片,112—接触部,201—自动养蚕系统,202—第一周转箱,203—第二周转箱,210—机器人手臂,211—蚕卵或饲料供给位置,212—蚕的拾取位置(旋转台),213—使蚕向单独饲养容器移动或者从单独饲养容器取出蚕茧的位置(能够升降),214—连结输送机,215—饲养容器自动收纳机构,216—饲养搁
架,220—分隔部件移动机构(推动、拉动(将爪搭在分隔部件的凸部来拉动)),230—饲养容器自动收纳机构的轨道,240—分隔部件,241—分隔部,242—弹性部件,243—平面部,244—孔,245—凸缘部,246—凸部,300—上蔟室容器,301—框格,310—漏斗,311—第一闸门,312—第二闸门,320—集中饲养容器,321—第一分隔件,322—第二分隔件,325—饲料,330—单独移动框格,331—框格,332—波型单独移动框格,333—波型框格,335—金属网,336—金属网单独移动框格,611—搅拌装置,620—切换阀,621—第一喷嘴,622—第二喷嘴,623—第三喷嘴,630—机器人手臂,641、643、645—开闭阀,651—旋转轴,652—叶片部件,671—开闭阀,672—过滤器,921—风扇,922—换热器,923—过滤器,924—过滤器,a—蚕,ar—蚕移载区域,ar1—第一饲养容器保管区域,ar2—第二饲养容器保管区域,at—无菌气氛,c1—第一饲养容器,c2—第二饲养容器,c3—容器,cl—盖部件,cy—筒状容器,ca—第一端部,cb—第二端部,d1—分支部,d2—分支部,dr—门,dr1—第一门,dr2—第二门,e、e1、e2—蚕卵,f—饲料,f1—桑叶,f2—豆渣,h—壳体部件,is—内部空间,j—分隔壁,m—蚕粪,m1、m2—马达,op—开口,p—分隔部件,p1—第一分隔部件,p2—第二分隔部件,ph—流体供给路,pl—饲料支撑部,pa—卡合部,r1—第一区域,r2—第二区域,rn1—第一区域,rn2—第二区域,sp—饲养室,sp1—第一饲养室,sp2—第二饲养室,t1—搁架,t2—搁架,wa—外壁,ws—内表面。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。