1.本发明涉及同步带制造技术领域,尤其涉及一种同步带传动设计参数确定方法、装置、存储介质以及设备。
背景技术:
2.全电动注塑机注射动作的同步带传动,不仅要求有快速的响应,也追求有小的噪音。现有的设计方法是首先满足空间几何上的要求且仅给出传动设计参数的一个解,然后,进行减少惯量设计,因此,减少惯量设计往往是在不好的传动设计基础上进行,达不成快速响应的目标,为了在减少惯量的同时能够快速响应,需加大伺服电机或驱动器,增加成本;或者反反复复进行传动设计及减少惯量设计,费时费力。
技术实现要素:
3.本发明要解决的技术问题是:在同步带的设计过程中,如何在减少惯量的同时有效提高响应速度并减小同步带传动噪音。
4.为解决上述技术问题,本发明提供了一种同步带传动设计参数确定方法、装置、存储介质以及设备。
5.本发明的第一个方面提供了一种同步带传动设计参数确定方法,同步带传动包括主动轮、从动轮和同步带,所述方法包括:
6.获取多个单元矩阵,所述单元矩阵包括一个主动轮齿数、一个从动轮齿数和一个同步带长度;
7.根据所述单元矩阵确定出与每个所述单元矩阵对应的中心距,并根据预设带宽、同步带带宽、最小带轮齿数和所述主动轮齿数确定出与每个所述单元矩阵对应的综合评价因子;
8.基于所述综合评价因子从多个所述中心距中确定出目标中心距,以将所述目标中心距以及与所述目标中心距对应的所述主动轮齿数、所述从动轮齿数、所述同步带长度和所述同步带带宽作为所述同步带传动的目标传动设计参数。
9.在一些实施例中,所述获取多个单元矩阵,所述单元矩阵包括一个主动轮齿数、一个从动轮齿数和一个同步带长度,包括:
10.获取主动轮齿数基础矩阵、从动轮齿数基础矩阵以及同步带长度基础矩阵;
11.遍历所述主动轮齿数基础矩阵、所述从动轮齿数基础矩阵以及所述同步带长度基础矩阵,得到包括所述主动轮齿数、所述从动轮齿数和所述同步带长度所有组合的综合扩展矩阵,所述单元矩阵包括位于所述综合扩展矩阵中同一列的一个所述主动轮齿数、一个所述从动轮齿数和一个所述同步带长度。
12.在一些实施例中,所述获取主动轮齿数基础矩阵、从动轮齿数基础矩阵以及同步带长度基础矩阵,包括:
13.获取1行m列的所述主动轮齿数基础矩阵、1行m列的所述从动轮齿数基础矩阵以及
1行n列的所述同步带长度基础矩阵;
14.遍历所述主动轮齿数基础矩阵、所述从动轮齿数基础矩阵以及所述同步带长度基础矩阵,得到包括所述主动轮齿数、所述从动轮齿数和所述同步带长度所有组合的综合扩展矩阵,包括:
15.根据所述同步带长度基础矩阵的基础列数n对所述主动轮齿数基础矩阵和所述从动轮齿数基础矩阵分别进行扩展,得到n行m列矩阵结构的主动轮齿数扩展矩阵和n行m列矩阵结构的从动轮齿数扩展矩阵;根据所述主动轮齿数基础矩阵的基础列数m对所述同步带长度基础矩阵进行扩展,得到1行m*n列矩阵结构的同步带长度扩展矩阵;
16.对所述主动轮齿数扩展矩阵和所述从动轮齿数扩展矩阵进行变形,得到主动轮齿数扩展变形矩阵和从动轮齿数扩展变形矩阵,所述主动轮齿数扩展变形矩阵和所述从动轮齿数扩展变形矩阵与所述同步带长度扩展矩阵的矩阵结构相同;
17.将所述主动轮齿数扩展变形矩阵、所述从动轮齿数扩展变形矩阵和所述同步带长度扩展矩阵组合得到3行m*n列矩阵结构综合扩展矩阵。
18.在一些实施例中,根据所述单元矩阵确定出与每个所述单元矩阵对应的中心距,包括:
19.针对每个所述单元矩阵,分别执行以下步骤:
20.根据同步带节距和所述单元矩阵中的所述主动轮齿数确定主动轮直径,以及根据所述同步带节距和所述单元矩阵中的所述从动轮齿数确定从动轮直径;
21.根据所述主动轮直径、所述从动轮直径和所述同步带长度确定与所述单元矩阵对应的所述中心距。
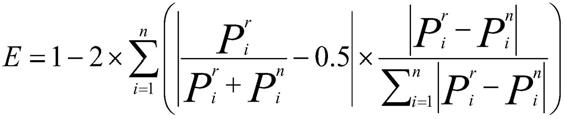
22.在一些实施例中,基于以下表达式确定与每个所述单元矩阵对应的综合评价因子:
[0023][0024]
在一些实施例中,基于所述综合评价因子从多个所述中心距中确定出目标中心距,以将所述目标中心距以及与所述目标中心距对应的所述主动轮齿数、所述从动轮齿数、所述同步带长度和所述同步带带宽作为所述同步带传动的目标传动设计参数包括:
[0025]
基于数值最小的所述综合评价因子,确定出与数值最小的所述综合评价因子对应的所述中心距并将与数值最小的所述综合评价因子对应的所述中心距作为目标中心距,以将所述目标中心距以及与所述目标中心距对应的所述主动轮齿数、所述从动轮齿数、所述同步带长度和所述同步带带宽作为所述同步带传动的目标传动设计参数。
[0026]
在一些实施例中,所述方法还包括:获取所述同步带传动对应的固有传动设置参数、同步带传动功率表中的最大主动轮齿数和所述最小带轮齿数,所述固有传动设置参数包括初始中心距、同步带节距和传动比;
[0027]
通过以下步骤获取所述主动轮齿数基础矩阵和所述从动轮齿数基础矩阵:
[0028]
根据所述初始中心距、所述同步带节距、所述传动比、所述最大主动轮齿数以及所述最小带轮齿数确定出所述主动轮齿数基础矩阵;
[0029]
根据所述主动轮齿数基础矩阵和所述传动比确定所述从动轮齿数基础矩阵。
[0030]
在一些实施例中,根据所述初始中心距、所述同步带节距、所述传动比、所述最大
主动轮齿数以及所述最小带轮齿数确定出所述主动轮齿数基础矩阵,包括:
[0031]
根据所述初始中心距、所述同步带节距、所述传动比以及所述最小带轮齿数确定出所述主动轮齿数的最小值;
[0032]
根据所述初始中心距、所述同步带节距、所述最大主动轮齿数和所述传动比确定出所述主动轮齿数的最大值;
[0033]
根据所述最小值和所述最大值确定所述主动轮齿数的取值范围,基于所述取值范围确定出所述主动轮齿数基础矩阵。
[0034]
在一些实施例中,基于所述综合评价因子从多个所述中心距中确定出目标中心距,以将所述目标中心距以及与所述目标中心距对应的所述主动轮齿数、所述从动轮齿数、所述同步带长度和所述同步带带宽作为所述同步带传动的目标传动设计参数之前,所述方法还包括:
[0035]
从多个所述单元矩阵中筛选出至少满足所述中心距符合第一预设条件、主动轮啮合齿数符合第二预设条件和所述同步带带宽符合第三预设条件中一个的样本单元矩阵,其中,所述主动轮啮合齿数基于所述主动轮齿数、主动轮直径、从动轮直径和所述中心距确定;
[0036]
基于所述综合评价因子从多个所述中心距中确定出目标中心距,以将所述目标中心距以及与所述目标中心距对应的所述主动轮齿数、所述从动轮齿数、所述同步带长度和所述同步带带宽作为所述同步带传动的目标传动设计参数,包括:
[0037]
基于所述综合评价因子从与所述样本单元矩阵对应的所述中心距中确定出目标中心距,以将所述目标中心距以及与所述目标中心距对应的所述样本单元矩阵和所述同步带带宽作为所述同步带传动的目标传动设计参数。
[0038]
在一些实施例中,所述第一预设条件包括所述中心距和初定中心距的偏差小于等于预设偏差阈值,所述第二预设条件包括所述主动轮啮合齿数大于等于预设啮合齿数阈值,所述第三预设条件包括所述同步带带宽小于等于预设带宽阈值。
[0039]
本发明的第二个方面提供了一种同步带传动设计参数确定装置,其包括:
[0040]
获取模块,用于获取多个单元矩阵,所述单元矩阵包括一个主动轮齿数、一个从动轮齿数和一个同步带长度;
[0041]
计算模块,用于根据所述单元矩阵确定出与每个所述单元矩阵对应的中心距,并根据预设带宽、同步带带宽、最小带轮齿数和所述主动轮齿数确定出与每个所述单元矩阵对应的综合评价因子;
[0042]
确定模块,用于基于所述综合评价因子从多个所述中心距中确定出目标中心距,以将所述目标中心距以及与所述目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为所述同步带传动的目标传动设计参数。
[0043]
本发明的第三个方面提供了一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序被处理器执行时能够实现如上任意一项所述的同步带传动设计参数确定方法。
[0044]
本发明的第四个方面提供了一种设备,其包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时能够实现如上任意一项所述的同步带传动设计参数确定方法。
[0045]
与现有技术相比,上述方案中的一个或多个实施例可以具有如下优点或有益效果:
[0046]
应用本发明的同步带传动设计参数确定方法,同步带传动可以包括主动轮、从动轮和同步带,通过获取多个单元矩阵,其中单元矩阵可以包括一个主动轮齿数、一个从动轮齿数和一个同步带长度,根据单元矩阵确定出与每个单元矩阵对应的中心距以及综合评价因子,再基于综合评价因子从多个中心距中确定出目标中心距,以将该目标中心距以及与所述目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。该方法中综合评价因子基于预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定,综合考虑了同步带传动过程的响应速度、同步带传动噪音以及转动惯量,基于综合评价因子确定目标传动设计参数可以在减少惯量设计的同时有效保证提高响应速度和降低同步带传动噪音的需求。
附图说明
[0047]
通过结合附图阅读下文示例性实施例的详细描述可更好地理解本公开的范围。其中所包括的附图是:
[0048]
图1示出了现有技术提供的一种同步带传动的传动结构示意图;
[0049]
图2示出了本发明实施例提供的一种同步带传动设计参数确定方法的流程示意图;
[0050]
图3示出了本发明另一实施例提供的同步带传动设计参数确定方法的流程示意图;
[0051]
图4示出了本发明另一实施例提供的一种同步带传动设计参数确定方法的流程示意图;
[0052]
图5示出了本发明实施例提供的一种同步带传动设计参数确定装置;
[0053]
图6示出了本发明实施例提供的一种设备示意图。
具体实施方式
[0054]
为使本发明的目的、技术方案和优点更加清楚,以下将结合附图及实施例来详细说明本发明的实施方法,借此对本发明如何应用技术手段来解决技术问题,并达成技术效果的实现过程能充分理解并据以实施。
[0055]
全电动注塑机注射动作的同步带传动,不仅要求有快速的响应,也追求有小的噪音。现有的设计方法是首先满足空间几何上的要求且仅给出传动设计参数的一个解,然后,进行减少惯量设计,因此,减少惯量设计往往是在不好的传动设计基础上进行,达不成快速响应的目标,为了在减少惯量的同时能够快速响应,需加大伺服电机或驱动器,增加成本;或者反反复复进行传动设计及减少惯量设计,费时费力。
[0056]
有鉴于此,本发明的同步带传动设计参数确定方法,同步带传动可以包括主动轮、从动轮和同步带,通过获取多个单元矩阵,其中单元矩阵可以包括一个主动轮齿数、一个从动轮齿数和一个同步带长度,根据单元矩阵确定出与每个单元矩阵对应的中心距以及综合评价因子,再基于综合评价因子从多个中心距中确定出目标中心距,以将该目标中心距以及与所述目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步
带传动的目标传动设计参数。该方法中综合评价因子基于预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定,综合考虑了同步带传动过程的响应速度、同步带传动噪音以及转动惯量,基于综合评价因子确定目标传动设计参数可以在减少惯量设计的同时有效保证提高响应速度和降低同步带传动噪音的需求。
[0057]
为了更好的理解同步带传动的传动结构,参见图1所示,图1示出了现有技术提供的一种同步带传动的传动结构示意图,其中可以包括两个直径不同的带轮:小带轮和大带轮,以及设置在两个带轮上的同步带。带轮上可以有凹凸设置的齿形结构且同步带上可以设置有与齿形结构吻合的结构,相邻齿形之间的距离可以用同步带节距pb表示,小带轮的直径可以表示为d1,小带轮的齿数可以用z1表示,小带轮的啮合齿数可以用ze表示,大带轮的直径可以表示为d2,大带轮的齿数z2可以通过传动比i和小带轮齿数z1的乘积确定,大带轮和小带轮的初定中心距可以表示为a0,实际的中心距可以表示为a1,中心距偏差可以用apc表示。在一些实施例中,可以以小带轮作为主动轮,大带轮作为从动轮。在其他实施例中,也可以根据需要选择目标带轮作为主动轮。
[0058]
实施例一
[0059]
参见图2所示,图2示出了本发明实施例提供的一种同步带传动设计参数确定方法的流程示意图,同步带传动包括主动轮、从动轮和同步带,该方法可以包括:
[0060]
步骤s101:获取多个单元矩阵,单元矩阵包括一个主动轮齿数、一个从动轮齿数和一个同步带长度;
[0061]
步骤s102:根据单元矩阵确定出与每个单元矩阵对应的中心距以及根据预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定出与每个单元矩阵对应的综合评价因子;
[0062]
步骤s103:基于综合评价因子从多个中心距中确定出目标中心距,以将目标中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。
[0063]
在本发明实施例中,可以直接获取多个单元矩阵,单元矩阵可以为由一个主动轮齿数、一个从动轮齿数和一个同步带长度形成的1行3列的矩阵或者3行1列的矩阵,在本发明实施例中并不做具体的限制。
[0064]
在一些实施例中,还可以通过以下步骤获取多个单元矩阵:
[0065]
获取主动轮齿数基础矩阵、从动轮齿数基础矩阵以及同步带长度基础矩阵;
[0066]
遍历主动轮齿数基础矩阵、从动轮齿数基础矩阵以及同步带长度基础矩阵,得到包括主动轮齿数、从动轮齿数和同步带长度所有组合的综合扩展矩阵,单元矩阵包括位于综合扩展矩阵中同一列的一个所述主动轮齿数、一个所述从动轮齿数和一个所述同步带长度。
[0067]
其中,主动轮齿数基础矩阵中的主动轮齿数可以各不相同,从动轮齿数基础矩阵中的从动轮齿数可以各不相同,同步带长度基础矩阵中的同步带长度可以各不相同。具体根据主动轮齿数基础矩阵、从动轮齿数基础矩阵以及同步带长度基础矩阵获取单元矩阵的方法请参见以下实施例二中描述。
[0068]
在步骤s102中可以针对每个单元矩阵,分别执行以下步骤来确定中心距:
[0069]
根据同步带节距pb和单元矩阵中的主动轮齿数确定主动轮直径d1,以及根据同步带节距pb和单元矩阵中的从动轮齿数确定从动轮直径d2;
[0070]
根据主动轮直径d1、从动轮直径d2和同步带长度确定与单元矩阵对应的中心距a1。
[0071]
在一些实施例中,根据主动轮直径d1、从动轮直径d2和同步带长度,确定出中间数据k,再基于中间数据k、主动轮直径d1和从动轮直径d2确定出中心距a1。
[0072]
在其他实施例中,还可以根据主动轮直径d1、从动轮直径d2和中心距a1确定出切线长qxc。还可以根据主动轮直径d1、张力系数f2、电机功率djgl和同步带单位宽度额定功率用的主动轮转速n11确定出同步带张力pdzl,其中电机功率djgl可以根据螺杆直径d、注射压力pa、丝杆导程p、电机转速n0、射胶速度v、转速协调系数f1、丝杆效率y1、轴承效率y2和带传动效率y3确定,另外,根据丝杆导程p和射胶速度v得到主动轮转速n1,根据主动轮转速n1和转速协调系数f1可以确定出同步带单位宽度额定功率用的主动轮转速n11,电机功率djgl还可以根据螺杆直径d、注射压力pa、丝杆导程p、同步带单位宽度额定功率用的主动轮转速n11、传动比i、丝杆效率y1、轴承效率y2和带传动效率y3确定。
[0073]
在步骤s102中可以根据以下表达式确定与每个单元矩阵对应的综合评价因子:
[0074][0075]
其中,同步带带宽可以表示为dkd,可以根据带宽系数dkxs、带宽系数斜率dkxl和预设带宽jbdk确定同步带带宽,带宽系数dkxs可以根据最大驱动功率、安全系数、同步带传动基准功率和同步带长度系数确定,最大驱动功率djgl可以基于螺杆直径d、注射压力pa、丝杆导程p、电机转速n0、射胶速度v、转速协调系数f1、丝杆效率y1、轴承效率y2和带传动效率y3确定。
[0076]
基于主动轮侧零件的惯量对总惯量影响最大,在本发明实施例中,针对主动轮侧零件设置综合评价因子。综合评价因子可以基于以下原理构建:
[0077]
根据带轮的转动惯量与带轮半径(或带轮齿数)的平方成正比,转动惯量与带轮宽度成正比,同步带传动噪音与同步带宽度成正比,以及同步带传动噪音随着同步带线速度增大而增大,设定具有预设带宽及最小齿数的带轮的综合特性值为1,根据影响转动惯量的2个因素:带轮齿数(或带轮半径)和带轮宽度,以及影响同步带传动噪音的2个因素:同步带宽度和同步带线速度,构建综合评价因子:
[0078][0079]
从而能够根据综合评价因子更直观的判断出同步带传动在转动惯量、响应速度以及同步带传动噪音方面的综合性能,确保在减小转动惯量的同时满足对提高响应速度以及降低同步带传动噪音的需求。
[0080]
在本发明实施例中,步骤s103可以具体为基于数值最小的综合评价因子,确定出与数值最小的综合评价因子对应的中心距并将与数值最小的综合评价因子对应的中心距作为目标中心距,以将目标中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。
[0081]
以上为本发明实施例提供的一种同步带传动设计参数确定方法,应用本发明的同步带传动设计参数确定方法,同步带传动可以包括主动轮、从动轮和同步带,通过获取多个单元矩阵,其中单元矩阵可以包括一个主动轮齿数、一个从动轮齿数和一个同步带长度,根据单元矩阵确定出与每个单元矩阵对应的中心距以及综合评价因子,再基于综合评价因子从多个中心距中确定出目标中心距,以将该目标中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。该方法中综合评价因子基于预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定,综合考虑了同步带传动过程的响应速度、同步带传动噪音以及转动惯量,基于综合评价因子确定目标传动设计参数,可以在减少惯量设计的同时有效保证提高响应速度和降低同步带传动噪音的需求。
[0082]
实施例二
[0083]
参见图3所示,图3示出了本发明另一实施例提供的同步带传动设计参数确定方法的流程示意图,其可以包括:
[0084]
步骤s201:获取1行m列的主动轮齿数基础矩阵a、1行m列的从动轮齿数基础矩阵b以及1行n列的同步带长度基础矩阵c;
[0085]
步骤s202:根据同步带长度基础矩阵c的基础列数n对主动轮齿数基础矩阵a和从动轮齿数基础矩阵b分别进行扩展,得到n行m列矩阵结构的主动轮齿数扩展矩阵a1和n行m列矩阵结构的从动轮齿数扩展矩阵b1;根据主动轮齿数基础矩阵a的基础列数m对同步带长度基础矩阵c进行扩展,得到1行m*n列矩阵结构的同步带长度扩展矩阵c1。
[0086]
步骤s203:对主动轮齿数扩展矩阵a1和从动轮齿数扩展矩阵b1进行变形,得到主动轮齿数扩展变形矩阵a11和从动轮齿数扩展变形矩阵b11,主动轮齿数扩展变形矩阵a11和从动轮齿数扩展变形矩阵b11与同步带长度扩展矩阵c1的矩阵结构相同;
[0087]
步骤s204:将主动轮齿数扩展变形矩阵a11、从动轮齿数扩展变形矩阵b11和同步带长度扩展矩阵c1组合得到3行m*n列矩阵结构综合扩展矩阵d,单元矩阵包括综合扩展矩阵d中位于同一列的一个主动轮齿数、一个从动轮齿数和一个同步带长度;
[0088]
步骤s205:根据单元矩阵确定出与每个单元矩阵对应的中心距,并根据预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定出与每个单元矩阵对应的综合评价因子;
[0089]
步骤s206:基于综合评价因子从多个中心距中确定出目标中心距,以将目标中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。
[0090]
其中,步骤s205和步骤s206可以采用和实施例一中步骤s102和步骤s103相同方式执行,为了简要起见在此不再赘述,以下主要针对与实施例一中有区别的步骤s201至步骤s204进行描述。
[0091]
其中,在执行步骤s201之前可以预先获取同步带对应的固有传动设置参数、同步带传动功率表中的最大主动轮齿数和最小带轮齿数zmin,固有传动设置参数可以包括初始中心距a0、同步带节距pb、和传动比i,其中传动比i可以通过丝杆导程p、射胶速度v以及电机转速n0确定;
[0092]
进而,在步骤s201中可以根据初始中心距a0、同步带节距pb、传动比i、最大主动轮齿数以及最小带轮齿数zmin确定出主动轮齿数基础矩阵a,根据主动轮齿数基础矩阵a和传
动比i确定出从动轮齿数基础矩阵b。
[0093]
在其他实施例中,也可以基于已有的主动轮齿数直接生成主动轮齿数基础矩阵a以及根据已有的从动轮齿数直接生成从动轮齿数基础矩阵b。
[0094]
其中,同步带长度基础矩阵c可以为根据需要选择不同的同步带长度生成。
[0095]
在一些实施例中,根据初始中心距、同步带节距、传动比、最大主动轮齿数以及最小带轮齿数zmin确定出主动轮齿数基础矩阵a可以包括:根据初始中心距a0、传动比i、同步带节距pb以及最小带轮齿数zmin确定出主动轮齿数的最小值;根据初始中心距a0、同步带传动功率表中的最大主动轮齿数、传动比i和同步带节距pb确定出主动轮齿数的最大值;根据最小值和最大值确定主动轮齿数的取值范围,基于取值范围确定主动轮齿数基于矩阵a。
[0096]
其中,通过运行ceil函数可以得到主动轮齿数的最小值x1l,通过运行fix函数可以得到主动轮齿数的最大值x1u,由此可以得到主动轮齿数的取值范围[x1l,x1u],基于该取值范围中的所有取值构建主动轮齿数基础矩阵a,并通过运行round函数得到从动轮齿数基础矩阵b。
[0097]
在本发明实施例中,步骤s202可以具体为:
[0098]
采用repmat函数,根据同步带长度基础矩阵c的基础列数n对主动轮齿数基础矩阵a和从动轮齿数基础矩阵b分别进行扩展,得到n行m列矩阵结构的主动轮齿数扩展矩阵a1和n行m列矩阵结构的从动轮齿数扩展矩阵b1;以及,采用repmat函数,根据主动轮齿数基础矩阵a的基础列数m对同步带长度基础矩阵c进行扩展,得到1行m*n列矩阵结构的同步带长度扩展矩阵c1。
[0099]
在本发明实施例中,步骤s203可以具体为采用reshape函数分别对主动轮齿数扩展矩阵a1和从动轮齿数扩展矩阵b1进行变形,得到1行m*n列矩形结构的主动轮齿数扩展变形矩阵a11和1行m*n列从动轮齿数扩展变形矩阵b11。
[0100]
步骤s204可以具体为将主动轮齿数扩展变形矩阵a11、从动轮齿数扩展变形矩阵和同步带长度扩展矩阵c1组合得到3行m*n列矩阵结构的综合扩展矩阵d。
[0101]
作为示例,可运行repmat函数得到主动轮齿数扩展矩阵a1=repmat(a,n,1),再通过运行reshape函数将主动轮齿数扩展矩阵a1调整为主动轮齿数扩展变形矩阵a11=reshape(a1,1,m*n);同样的,可运行repmat函数得到从动轮齿数扩展矩阵b1=repmat(b,n,1),再通过运行reshape函数将从动轮齿数扩展矩阵b1调整为从动轮齿数扩展变形矩阵b11=reshape(b1,1,m*n);还可以运行repmat函数得到同步带长度扩展矩阵c1=repmat(c,1,m),最后组合得到主动轮齿数、从动轮齿数和同步带长度的综合扩展矩阵d=[a11;b11;c1]。其中综合扩展矩阵d的第1行可以为m*n个主动轮齿数,扩展矩阵d的第2行可以为m*n个从动轮齿数,扩展矩阵d的第3行可以为m*n个同步带长度,单元矩阵可以由综合扩展矩阵d中第k1列对应的一个主动轮齿数、一个从动轮齿数和一个同步带长度组成,k1可以取1、2、3
……
m*n。通过首先对主动轮齿数基础矩阵a、从动轮齿数基础矩阵b及同步带长度基础矩阵c进行矩阵扩展,其次,把扩展后的齿数矩阵调整为与扩展后的同步带长度矩阵相同的矩阵结构,最后,把调整得到的齿数矩阵和扩展的同步带长度矩阵垂直联接得到综合扩展矩阵d,从而可以得到主动轮齿数、从动轮齿数和同步带长度的所有组合。
[0102]
作为一具体示例,主动轮齿数基础矩阵a=[z
a1 z
a2 z
a3
],从动轮齿数基础矩阵b=[z
b1 z
b2 z
b3
],同步带长度基础矩阵c=[c
1 c2],经扩展、变形、组合处理后可得到综合扩展
矩阵
[0103]
以上为本发明另一实施例提供的一种同步带传动设计参数确定方法,通过生成同步带的主动轮齿数基础矩阵、从动轮齿数基础矩阵以及同步带长度基础矩阵,根据同步带长度基础矩阵的基础列数对主动轮齿数基础矩阵和从动轮齿数基础矩阵分别进行扩展,并根据主动轮齿数基础矩阵的基础列数对同步带长度基础矩阵进行扩展,并把扩展后的齿数矩阵调整为与扩展后的同步带长度矩阵相同的矩阵结构,最后,把调整得到的齿数矩阵和扩展的同步带长度矩阵垂直联接得到综合扩展矩阵,通过遍历扩展矩阵获取由主动轮齿数、从动轮齿数和同步带长度组成的多个单元矩阵,计算扩展矩阵中每个单元矩阵对应的中心距以及综合评价因子,最后基于数值最小的综合评价因子确定出与其对应的中心距,并将该中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带传动的目标传动设计参数。其中综合评价因子是基于同步带的同步带带宽、预设带宽、最小带轮齿数zmin和主动轮齿数确定,综合考虑了同步带传动过程的响应速度、噪音以及转动惯量,基于基于综合评价因子确定目标传动设计参数,可以保证惯量设计是在好的同步带传动设计基础上实现,达到了在减小转动惯量的同时有效提高响应速度并减小同步带传动噪音效果。另外,通过矩阵扩展、变形和组合得到包含了主动轮齿数、从动轮齿数和同步带长度所有组合的综合扩展矩阵d,可以提供更多的设计参数可选方案,更有利于筛选出最优的目标传动设计参数。
[0104]
在本发明实施例中,为了确保传动设计参数能够满足预设的要求,提高同步带的传动性能,还可以从多个单元矩阵中筛选出中心距、主动轮啮合齿数和同步带带宽中至少一个符合预设条件的样本单元矩阵,具体请参见以下实施例三的描述。
[0105]
实施例三
[0106]
该实施例可以基于以上实施例一或实施例二实现,在下文中将基于实施例二进行描述。
[0107]
参见图4所示,图4示出了本发明实施例提供的一种同步带传动设计参数确定方法的流程示意图,其可以包括:
[0108]
步骤s301:获取1行m列的主动轮齿数基础矩阵a、1行m列的从动轮齿数基础矩阵b以及1行n列的同步带长度基础矩阵c;
[0109]
步骤s302:根据同步带长度基础矩阵c的基础列数n对主动轮齿数基础矩阵a和从动轮齿数基础矩阵b分别进行扩展,得到n行m列矩阵结构的主动轮齿数扩展矩阵a1和n行m列矩阵结构的从动轮齿数扩展矩阵b1;根据主动轮齿数基础矩阵a的基础列数m对同步带长度基础矩阵c进行扩展,得到1行m*n列矩阵结构的同步带长度扩展矩阵c1。
[0110]
步骤s303:对主动轮齿数扩展矩阵a1和从动轮齿数扩展矩阵b1进行变形,得到主动轮齿数扩展变形矩阵a11和从动轮齿数扩展变形矩阵b11,主动轮齿数扩展变形矩阵a11和从动轮齿数扩展变形矩阵b11与同步带长度扩展矩阵c1的矩阵结构相同;
[0111]
步骤s304:将主动轮齿数扩展变形矩阵a11、从动轮齿数扩展变形矩阵b11和同步带长度扩展矩阵c1组合得到3行m*n列矩阵结构综合扩展矩阵d,单元矩阵包括综合扩展矩
阵d中位于同一列的一个主动轮齿数、一个从动轮齿数和一个同步带长度;
[0112]
步骤s305:根据单元矩阵确定出与每个单元矩阵对应的中心距,并根据预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定出与每个单元矩阵对应的综合评价因子;
[0113]
步骤s306:从多个单元矩阵中筛选出至少满足中心距符合第一预设条件、主动轮啮合齿数符合第二预设条件、同步带带宽符合第三预设条件中一个的样本单元矩阵,其中,主动轮啮合齿数基于主动轮齿数、主动轮直径、从动轮直径和中心距确定;
[0114]
步骤s307:基于综合评价因子从与样本单元矩阵对应的中心距中确定出目标中心距,以将目标中心距以及与目标中心距对应的样本单元矩阵和同步带带宽作为同步带传动的目标传动设计参数。
[0115]
其中,步骤s301至步骤s305可以相应采用和以上实施例二中步骤s201至步骤s205相同的方式执行,为了简要起见在此不再赘述。
[0116]
在本发明实施例,第一预设条件可以包括中心距a1和初定中心距a0的偏差小于等于预设偏差阈值apc,第二预设条件可以包括主动轮啮合齿数ze大于等于预设啮合齿数阈值,第三预设条件可以包括同步带带宽dkd小于等于预设带宽阈值。基于主动轮啮合齿数筛选符合第二预设条件的样本单元矩阵,有利于保证同步带的传动功率。
[0117]
在一些实施例中,可以根据中心距a1与初定中心距a0的差值的绝对值计算出中心距a1和初定中心距a0的偏差,即中心距偏差apc。
[0118]
在一些实施例中,基于主动轮齿数、主动轮直径、从动轮直径和中心距确定主动轮啮合齿数可以为根据主动轮齿数和同步带节距pb确定出主动轮直径d1,根据从动轮齿数和同步带节距pb确定出从动轮直径d2,再根据主动轮齿数、主动轮直径d1、从动轮直径d2和中心距a1确定出主动轮啮合齿数ze。
[0119]
在步骤s305中则可以基于第一预设条件、第二预设条件和第三预设条件中的至少一个条件筛选出样本单元矩阵,进一步结合综合评价因子确定出与数值最小综合评价因子对应的样本单元矩阵,将该样本单元矩阵作为目标单元矩阵,将与目标单元矩阵对应的中心距、主动轮齿数、从动轮齿数、同步带长度以及同步带带宽作为同步带传动的目标传动设计参数。
[0120]
以上为本发明实施例提供的另一同步带传动设计参数确定方法,该方法除了可以实现与上述实施例二相同的有益效果,还根据中心距偏差、主动轮啮合齿数和同步带带宽中的至少一个从多个单元矩阵中筛选出符合设计条件的样本单元矩阵,再结合综合评价因子确定出目标传动设计参数,可以有效提高同步带传动的性能。
[0121]
具体示例
[0122]
设定电机的转速n0=3000rpm,丝杆导程p=20mm,射胶速度v=350mm/s,螺杆直径d=36mm,注射压力pa=181mpa,初定中心距a0=380mm,同步带节距pb=8mm,要求选定的同步带使中心距与初定中心距的中心距偏差满足apc≤2mm且啮合齿数大于等于6,并求出相关的参数。
[0123]
本发明具体示例提供的同步带传动设计参数确定方法可以包括:
[0124]
输入固有传动设置参数;
[0125]
根据固有传动设置参数生成主动轮齿数基础矩阵a以及从动轮齿数基础矩阵b,并获取同步带长度基础矩阵c;
[0126]
获取主动轮齿数、从动轮齿数和同步带长度的所有组合,每种组合作为一个单元矩阵;
[0127]
计算与每个单元矩阵对应的中心距、中心距偏差、主动轮啮合齿数、同步带带宽、综合评价因子、切线长以及同步带张力;
[0128]
筛选出中心距偏差、主动轮啮合齿数和同步带带宽符合预设条件的样本单元矩阵;
[0129]
结合综合评价因子,从样本单元矩阵中确定出与数值最小的综合评价因子对应的目标单元矩阵,将目标单元矩阵对应的中心距、主动轮齿数、从动轮齿数,同步带长度和同步带带宽作为同步带传动的目标传动设计参数。另外,根据需要还可以将与目标单元矩阵对应的切线长以及同步带张力作为优选的设计参数。
[0130]
最后根据表1所示,表1示出了本发明具体示例提供的多个单元矩阵对应的传动设计参数取值,从图中可以确定出在该示例中主动轮齿数33、从动轮齿数94和同步带长度为1280的单元矩阵对应的中心距、主动轮齿数、从动轮齿数,同步带长度和同步带带宽可作为目标传动设计参数。
[0131]
表1单元矩阵对应的传动设计参数取值表
[0132]
主动轮齿数232833344047从动轮齿数66809497114134同步带长度112012001280130414001520中心距378.035378.205378.021381.569380.329381.937中心距偏差1.964561.795221.978731.568620.3293831.9366主动轮啮合齿数10.389712.366112.2414.617516.696918.9562同步带带宽14410779766252综合评价因子59.235359.008452.658453.301157.761165.9132切线长374.05372.364369.957373.042368.474365.52张力2303.881892.471605.731558.511324.731127.43
[0133]
参见图5所示,图5示出了本发明实施例提供的一种同步带传动设计参数确定装置,其可以包括:
[0134]
获取模块51,用于获取多个单元矩阵,单元矩阵包括一个主动轮齿数、一个从动轮齿数和一个同步带长度;
[0135]
计算模块52,用于根据单元矩阵确定出与每个单元矩阵对应的中心距,并根据预设带宽、同步带带宽、最小带轮齿数和主动轮齿数确定出与每个单元矩阵对应的综合评价因子;
[0136]
确定模块53,用于基于综合评价因子从多个中心距中确定出目标中心距,以将目标中心距以及与目标中心距对应的主动轮齿数、从动轮齿数、同步带长度和同步带带宽作为同步带的目标传动设计参数。
[0137]
本发明的另一方面还提供了一种存储介质,该存储介质中存储有计算机程序,计算机程序被处理器执行时能够实现如上任意一实施例的同步带传动设计参数确定方法。
[0138]
以上描述的处理、功能、方法和/或软件可被记录、存储或固定在一个或多个计算机可读存储介质中,计算机可读存储介质包括程序指令,程序指令将被计算机实现,以使处
理器执行所述程序指令。存储介质还可单独包括程序指令、数据文件、数据结构等,或者包括其组合。存储介质或程序指令可被计算机软件领域的技术人员具体设计和理解,或者,存储介质或指令对计算机软件领域的技术人员而言可以是公知和可用的。计算机可读介质的示例包括:磁性介质,例如硬盘、软盘和磁带;光学介质,例如,cdrom盘和dvd;磁光介质,例如,光盘;和硬件装置,具体被配置以存储和执行程序指令,例如,只读存储器(rom)、随机存取存储器(ram)、闪存等。程序指令的示例包括机器代码(例如,由编译器产生的代码)和包含高级代码的文件,可由计算机通过使用解释器来执行所述高级代码。所描述的硬件装置可被配置为用作一个或多个软件模块,以执行以上描述的操作和方法,反之亦然。另外,计算机可读存储介质可分布在联网的计算机系统中,可以分散的方式存储和执行计算机可读代码或程序指令。
[0139]
本发明的另一方面提供了一种设备,参见图6所示,图6示出了本发明实施例提供的一种设备示意图,其包括存储器61和处理器62,存储器61中存储有计算机程序,计算机程序被处理器62执行时能够实现如上任意一实施例所述的同步带传动设计参数确定方法。
[0140]
需要说明的是,该设备可以包括一个或多个处理器62以及存储器61,处理器62和存储器61可以通过总线或者其他方式连接。存储器61作为一种非易失性计算机可读存储介质,可用于存储非易失性软件程序、非易失性计算机可执行程序以及模块。处理器62通过运行存储在存储器61中的非易失性软件程序、指令以及模块,从而执行设备的各种功能应用以及数据处理,即实现如上所述的同步带传动设计参数确定方法。
[0141]
虽然本发明所公开的实施方式如上,但所述的内容只是为了便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所公开的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本发明的保护范围,仍须以所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。