1.本发明涉及一种基于边缘计算的奶牛实时反刍行为识别方法,属于畜禽健康养殖技术领域。
背景技术:
2.奶牛健康异常或者疾病发生均会导致奶牛反刍行为的异常,对反刍动物反刍活动的时间轴和强度监控,能够反应每日行为模式的相关信息,因而应该及时掌握奶牛反刍行为信息,实现对奶牛健康及生理状况进行实时的监控;边缘计算是一种新兴的范例,它将计算任务和服务从网络核心推向网络边缘,已被广泛认为是一种有前途的解决方案。目前基于边缘计算的发展,产生了云端计算逐渐向边缘移动的趋势。边缘计算能够支持计算密集型的情况应用在资源受限的环境中。边缘计算将云服务从网络中心推向更加靠近奶牛等数据源和物联网设备的网络边缘,因而能够实现对奶牛反刍行为的实时监测。
3.现有技术是利用pc端软件提取奶牛群体的三轴加速度数据特征来识别奶牛行为,但忽视了随着精准畜牧的不断发展,农业物联网生成的数据也在增加,这导致云服务器的负载增加的问题。
技术实现要素:
4.本发明的目的在于提出一种基于边缘计算的奶牛实时反刍行为识别方法,通过内置于奶牛佩戴笼头的反刍检测器来获取奶牛个体的三轴加速度信息,完成数据预处理后,基于knn改进了反刍行为识别算法,以解决现有的基于云计算反刍监测方法存在的缺点。
5.一种基于边缘计算的奶牛实时反刍行为识别方法,基于边缘计算的奶牛实时反刍行为识别方法包括以下步骤:
6.s1、将反刍检测器固定在奶牛个体的笼头上,检测到奶牛的反刍行为后,选取奶牛个体已知的反刍样本数据集,再选择连续的包含反刍行为与其他行为的24小时三轴加速度数据作为测试数据集;
7.s2、反刍数据集与测试数据集以256帧为一组进行数据分割,分帧处理以形成短块来对奶牛反刍行为进行识别;
8.s3、对数据分割形成的最小处理单元进行特征提取;
9.s4、数据集完成s1
‑
s3的预处理后,利用基于knn改进的反刍行为识别算法实时地识别奶牛的反刍行为。
10.进一步的,在s3中,特征提取包括三个步骤:信号矢量幅度的计算、总体动态体加速度的计算和最小处理单元提取时域特征。
11.进一步的,对最小处理单元提取时域特征,提取的时域特征包括信号幅度矢量和总体动态体加速度的最大值、最小值、第一四分位数、中值、均值、均方根和平均绝对偏差作为分析特征,以及任意两轴的相关系数。
12.进一步的,在s3中,特征提取的具体步骤为:
13.s31、按照公式(1)计算处理单元内每帧的信号幅度矢量,
[0014][0015]
其中,acc
x
(n)、acc
y
(n)、acc
z
(n)分别表示第n(n=1,2,
…
,256)组数据在x方向、y方向以及z方向的加速度分量;
[0016]
s32、计算总体动态体加速度时,首先按照公式(2)计算出动态体加速度,
[0017]
dba
i
(n)=|acc
i
(n)
‑
μ
i
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0018]
其中,μ
i
是256帧最小处理单元以32帧为一组计算出的数据在i(i=x,y,z)轴的移动平均值,acc
i
(n)表示第n(n=1,2,
…
,8)组数据在i轴方向上的加速度,dba
i
(n)表示第n组数据在i轴上的动态体加速度;
[0019]
s33、对最小处理单元每32帧做以上迭代计算后,依据公式(3)计算出总体动态体加速度odba,
[0020]
odba(n)=dba
x
(n) dba
y
(n) dba
z
(n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0021]
其中dba
x
(n)、dba
y
(n)、dba
z
(n)分别表示第n(n=1,2,
…
,8)组数据在x、y轴和z轴的动态体加速度。
[0022]
进一步的,在s4中,具体包括以下步骤:
[0023]
s41、对于测试样本特征集中的单个样本,连续迭代地计算其与反刍样本特征集的欧几里得距离;
[0024]
s42、迭代求出单个测试样本特征集样本与反刍样本特征集中的每个样本距离,将距离排序,去掉距离的最大值与最小值,完成简单的最值滤波;
[0025]
s43、对于每个单个测试样本特征集迭代产生的距离数据集需要计算出总体滑动几何平均值,首先按照公式(4)计算出单个测试样本特征集与反刍样本特征集的初始滑动几何平均值,
[0026][0027]
在计算出初始滑动几何平均值后,可以按照公式(5)计算出总体滑动几何平均值,而后循环迭代计算出测试样本特征集与反刍样本特征集之间的总体滑动几何平均值数据集,
[0028][0029]
其中,n(n=1,2,
…
,n)为单个测试样本与单个反刍样本距离的时间序列,n表示反刍样本数据片段长度,w(n)为滑动窗口的窗长,i(i=1,2,
…
,1658)为总体的测试样本的时间序列;
[0030]
s44、对总体滑动几何平均值数据集进行排序,对排序好的距离样本,提取第400
‑
500位距离样本,计算其滑动几何平均值,完成反刍行为阈值σ
ruminate
的构建,通过设置自定义阈值实现k近邻算法k值设置的功能:当距离小于阈值时,第400
‑
500位距离样本形成的短块被定义为反刍样本,反之为其他行为;
[0031]
s45、分类阶段引入滑动窗口对预测结果进行校验,采用带指针且固定长度x的滑动窗口对测试样本特征集执行搜索。
[0032]
进一步的,在s45中,具体包括以下步骤:
[0033]
s451、带有指针的窗口下滑,当前指针指向的测试样本依据阈值判断奶牛是否进行反刍行为,当检测到奶牛反刍行为中断时,在行为中断的开始或结束记下当前短块的起始点为x1,记x1为反刍的开始点或者结束点;
[0034]
s452、指针寻址到滑动窗口窗尾x
n
(x
n
=x1 x),遍历x1点到x
n
点依据阈值判定奶牛行为,若指针检测到奶牛反刍行为中断,则将当前滑动窗口对应的测试数据集判定为混合块,记录该点为x
i
(x1≤x
i
≤x
n
);
[0035]
s453、当检测出混合块时,遍历x1点到x
i
点进行奶牛反刍行为的校验。
[0036]
本发明提出的一种基于边缘计算的奶牛实时反刍行为识别方法相对现有技术的有益效果是:本发明是通过基于边缘计算的奶牛实时反刍行为识别方法,不仅能够实时地检测奶牛的反刍行为,而且减轻了数据传输压力与云端计算量。反刍检测器对三轴加速度数据进行数据预处理,利用基于knn改进的反刍行为识别算法,能够实现奶牛较高精度的反刍行为识别。相较于传统的基于云计算的行为识别系统,具有更高的实时性和效率。
附图说明
[0037]
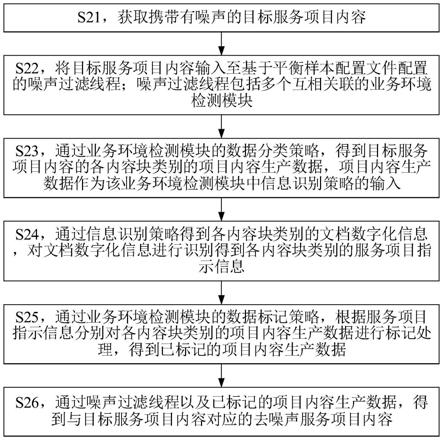
图1为本发明的一种基于边缘计算的奶牛实时反刍行为识别方法的识别逻辑图;
[0038]
图2为反刍检测器的结构示意图;
[0039]
图3为测试样本特征集与反刍样本特征集之间的总体滑动几何平均距离散点图;
[0040]
图4为排序后的测试样本特征集与反刍样本特征集之间的总体滑动几何平均距离散点图。
具体实施方式
[0041]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
参照图1所示,本发明提出了一种基于边缘计算的奶牛实时反刍行为识别方法,基于边缘计算的奶牛实时反刍行为识别方法包括以下步骤:
[0043]
s1、将反刍检测器固定在奶牛个体的笼头上,检测到奶牛的反刍行为后,选取奶牛个体已知的反刍样本数据集,再选择连续的包含反刍行为与其他行为的24小时三轴加速度数据作为测试数据集;
[0044]
s2、反刍数据集与测试数据集以256帧为一组进行数据分割,分帧处理以形成短块来对奶牛反刍行为进行识别;
[0045]
s3、对数据分割形成的最小处理单元进行特征提取;
[0046]
s4、数据集完成s1
‑
s3的预处理后,利用基于knn改进的反刍行为识别算法实时地识别奶牛的反刍行为。
[0047]
具体的,本发明提供了一种基于边缘计算的奶牛实时反刍行为识别方法,本发明的逻辑图如图1所示:奶牛反刍行为的实时识别过程涉数据预处理和反刍行为识别两个主要阶段。首先分析完整的记录,以划定显示颚运动的三轴加速度信号块。反刍数据集与测试
数据集以256帧为一组进行数据分割,分帧处理形成短块来进行特征提取,而后利用反刍识别算法对奶牛反刍行为进行识别。
[0048]
图2为反刍检测器,反刍检测器由数据采集模块、stm32单片机处理器、无线接收模块组成。锂电池为整个边缘设备供电;反刍检测器中的三轴加速度传感器采集测试数据并保存至集成的sd卡中;集成sd卡保存三轴加速度传感器所测量的数据,stm32单片机处理器以256组数据片段作为最小处理单元,对最小处理单元提取时域特征后,利用改进的自适应参数k
‑
近邻算法识别出奶牛个体的进食和反刍行为反馈回sd卡;无线发射装置、无线接收模块将已区分好的信号发送至云端。
[0049]
进一步的,在s3中,特征提取包括三个步骤:信号矢量幅度的计算、总体动态体加速度的计算和最小处理单元提取时域特征。
[0050]
进一步的,对最小处理单元提取时域特征,提取的时域特征包括信号幅度矢量和总体动态体加速度的最大值、最小值、第一四分位数、中值、均值、均方根和平均绝对偏差作为分析特征,以及任意两轴的相关系数。
[0051]
进一步的,在s3中,特征提取的具体步骤为:
[0052]
s31、按照公式(1)计算处理单元内每帧的信号幅度矢量(signal magnitude vector),
[0053][0054]
其中,acc
x
(n)、acc
y
(n)、acc
z
(n)分别表示第n(n=1,2,
…
,256)组数据在x方向、y方向以及z方向的加速度分量;
[0055]
s32、计算总体动态体加速度(overall dynamic body acceleration)时,首先按照公式(2)计算出动态体加速度,
[0056]
dba
i
(n)=|acc
i
(n)
‑
μ
i
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0057]
其中,μ
i
是256帧最小处理单元以32帧为一组计算出的数据在i(i=x,y,z)轴的移动平均值,acc
i
(n)表示第n(n=1,2,
…
,8)组数据在i轴方向上的加速度,dba
i
(n)表示第n组数据在i轴上的动态体加速度;
[0058]
s33、对最小处理单元每32帧做以上迭代计算后,依据公式(3)计算出总体动态体加速度odba,
[0059]
odba(n)=dba
x
(n) dba
y
(n) dba
z
(n)
ꢀꢀꢀꢀꢀ
(3)
[0060]
其中dba
x
(n)、dba
y
(n)、dba
z
(n)分别表示第n(n=1,2,
…
,8)组数据在x、y轴和z轴的动态体加速度。
[0061]
进一步的,在s4中,具体包括以下步骤:
[0062]
s41、对于测试样本特征集中的单个样本,连续迭代地计算其与反刍样本特征集的欧几里得距离;
[0063]
s42、迭代求出单个测试样本特征集样本与反刍样本特征集中的每个样本距离,将距离排序,去掉距离的最大值与最小值,完成简单的最值滤波;
[0064]
s43、对于每个单个测试样本特征集迭代产生的距离数据集需要计算出总体滑动几何平均值,首先按照公式(4)计算出单个测试样本特征集与反刍样本特征集的初始滑动几何平均值,
[0065][0066]
在计算出初始滑动几何平均值后,可以按照公式(5)计算出总体滑动几何平均值,而后循环迭代计算出测试样本特征集与反刍样本特征集之间的总体滑动几何平均值数据集,
[0067][0068]
其中,n(n=1,2,
…
,n)为单个测试样本与单个反刍样本距离的时间序列,n表示反刍样本数据片段长度,w(n)为滑动窗口的窗长,i(i=1,2,
…
,1658)为总体的测试样本的时间序列;
[0069]
s44、对总体滑动几何平均值数据集进行排序,对排序好的距离样本,提取第400
‑
500位距离样本,计算其滑动几何平均值,完成反刍行为阈值σ
ruminate
的构建,通过设置自定义阈值实现k近邻算法k值设置的功能:当距离小于阈值时,第400
‑
500位距离样本形成的短块被定义为反刍样本,反之为其他行为;
[0070]
s45、分类阶段引入滑动窗口对预测结果进行校验,采用带指针且固定长度x的滑动窗口对测试样本特征集执行搜索。
[0071]
进一步的,在s45中,具体包括以下步骤:
[0072]
s451、带有指针的窗口下滑,当前指针指向的测试样本依据阈值判断奶牛是否进行反刍行为,当检测到奶牛反刍行为中断时,在行为中断的开始或结束记下当前短块的起始点为x1,记x1为反刍的开始点或者结束点;
[0073]
s452、指针寻址到滑动窗口窗尾x
n
(x
n
=x1 x),遍历x1点到x
n
点依据阈值判定奶牛行为,若指针检测到奶牛反刍行为中断,则将当前滑动窗口对应的测试数据集判定为混合块,记录该点为x
i
(x1≤x
i
≤x
n
);
[0074]
s453、当检测出混合块时,遍历x1点到x
i
点进行奶牛反刍行为的校验。
[0075]
具体的,参照图3所示,以一头奶牛的一次实验为例,计算出测试样本特征集与反刍样本特征集之间的总体滑动几何平均距离散点图。可以发现,反刍行为样本与其他行为样本具有较好的区分度,其他行为的总体滑动几何平均距离值偏大且范围较广,而反刍行为的总体滑动几何平均距离值较小且比较集中分布。图4表示依据计算出的排序后的测试样本特征集与反刍样本特征集之间的总体滑动几何平均距离散点图,反刍样本与其他样本能够更加清晰的分离开,同时也可以看出有少部分的其他行为样本同样有较低的距离值,此种行为多是奶牛进食过程中连续的咀嚼行为使得饲料粒径不断减小,进食后期出现与反刍行为相近的信号,因而在反刍识别算法中需要加入反刍校验。
[0076]
以上实施示例只是用于帮助理解本发明的方法及其核心思想,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。