1.本发明涉及一种具有各权利要求的特征的用于确定换流器的中间回路电流的方法和设备。
背景技术:
2.特别是在实现涉及电驱动的机动车的功能安全的标准方面,了解驱动器的状态参量是必需的。在此问题在于,使用成本密集的传感器。例如由wo 2013 017 515 a1已知对三相电机的监控。该电机由逆变器馈电。所述逆变器连接在中间回路下游。通过如下方式进行所述监控,即,借助逆变器的所查明的输出电压和电流确定来逆变器输出功率,将所述逆变器输出功率又与借助所测量的中间回路电流和所测量的中间回路电压确定的中间回路功率相比较。
3.代替测量中间回路电流,例如按照现有技术d. (2015年)elektrische antriebe
‑
regelung von antriebssystemen,第四版,springer berlin heidelberg,根据桥支路/半导体开关的所测量的相电流和所谓的开关函数或开关状态确定逆变器的中间回路电流。亦即原则上存在避免在中间回路中的成本密集的电流传感器的可能性。问题在于借助该方案(特别是在对功能安全的要求的范围内)是否能够实现足够精确地确定逆变器的中间回路电流。
技术实现要素:
4.本发明的目的在于,按照简单且成本有利的方式尽可能精确地确定换流器的中间回路电流。
5.按照本发明,所述目的借助按照各权利要求所述的方法和设备实现。
6.从以下实施例以及各从属权利要求中得出本发明的另外的实施方案和对所实现的优点的描述。
附图说明
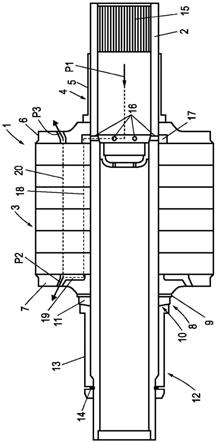
7.图1示出具有换流器/变流器的机电系统;
8.图2示出第一相的桥支路的上部开关处于闭合的状态;
9.图3示出从开关状态sa=0过渡至开关状态sa=1与在从输出电压的负电势转变至正电势之间的时间延迟。
具体实施方式
10.在图1中示出具有换流器/变流器1的机电系统。在该实例中,所述机电系统包括电机2。所述电机2例如涉及具有三相a、b和c的永久励磁式同步电机。所述换流器1自然也可以仅包括一相或多于三相。按照图1的机电系统优选用于驱动车辆。对电机2的控制或调节与提供或产生脉宽调制(pwm)信号的脉宽调制器(未示出)相结合地进行。这样的脉宽调制器
的结构和作用方式对于本领域技术人员来说是充分已知的。在图1中示出的换流器1对于本领域技术人员来说同样是充分已知的。所示出的换流器1是逆变器,亦即将直流电压转换成交流电压的电气设备。特别是借助于蓄电器提供直流电压ubat,并且交流电压用于驱动电机2。在图1中示出的三相系统按照星形连接设计,亦即三相a、b和c分别在一端上连接在一起。三角连接也是可能的。
11.为了与按照图1的机电系统相结合地运行车辆的电驱动器,必须遵守用于功能安全的标准iso26262。在该标准的范围内创建功能安全概念,所述功能安全概念此外通常要求将理论与实际(转动)力矩在阈值方面进行比较。为此,必需借助电驱动器的状态参量来计算实际力矩。优选地,按照两种不同的方法算出实际力矩。在第一方案中,根据转矩公式由所测量的输出/相电流ia、ib和ic(在图1中示例性示出第一相a的正向的相电流ia)来计算转动力矩。第二方案基于对中间回路电流izk(在图1中示出正向的中间回路电流izk)的确定。由中间回路电流izk与中间回路电压uzk的乘积得出在逆变器1的输入端上的有效功率。在减去逆变器1和驱动器的电损耗之后得出在电驱动器上的有效功率。最后,所述有效功率除以机械角速度得到转动力矩。将两种方案相结合,因为它们在不同的工作点中提供优点。
12.如开头所描述的那样,根据各个相sa、sb和sc(sx)的所测量的输出/相电流ia、ib和ic和所谓的开关函数/开关状态/占空比(借助所述开关函数/开关状态/占空比来切换/操控(半导体)开关)来计算逆变器1的中间回路电流izk是现有技术。因此如对于本领域技术人员通常已知的那样,借助于适当的电流传感器(在图1中仅示意性地表示)来测量相电流ia、ib和ic,在接着的流程中也看出更具体信息。配置给各个桥支路的开关的开关函数sx的功能值或各个相a、b和c 的开关状态可以分别是0或1(关断/接通,低/高)。
13.众所周知,在应用脉宽调制(例如正弦
‑
三角调制, sinus
‑
dreieck
‑
modulation)的情况下由理论值电压
‑
三角电压比较(下冲法)得出各个相a、b和c的开关函数sa、sb和sc,在这里参阅多个出版物或不同的方案以及参阅在接着的流程中的实施方式。换句话说,开关函数/开关状态sa、sb和sc对应于占空率/操控率/占空比/工作周期或由占空率/操控率/占空比/工作周期得出。
14.结果,通过将相位特定的开关函数sx与相应的所测量的相电流ix 相组合地(亦即通过将每个相位的这两个参量相乘并且形成这些各个乘积的总和)来确定、综合中间回路电流:izk=sa*ia sb*ib sc*ic。
15.按照本发明,为了改善在确定中间回路电流izk时的精确度,根据上述关系,考虑逆变器1的构造为功率半导体的开关的非理想的特性。所述非理想的特性特别是涉及功率半导体的与温度和电流有关的非线性的接通和关断行为,所述接通和关断行为此外也还是非对称的。在此,除了接通和关断延迟,部分由负载阻抗引起的上升和下降时间以及绝对要预留的死区时间也对中间回路电流izk的确定产生不利影响。
16.然而,首先例如在第一相a方面,借助于脉冲(宽度)调制器或适当的控制总成,根据下冲法,例如在特别是正弦形的预先给定的理论输出电压/理论输出电压信号ua_soll(亦即逆变器1的第一相位a(特别是相对于逆变器1的中间点m)的所期望的输出电压、亦即在逆变器1或中间回路的各相与中间点m之间测量的被称为中间点电压的相电势)的基础上,借助于比较器通过比较理论输出电压信号ua_soll 与(具有定义的频率和幅度的)三角
形辅助信号,推导出第一相a的桥支路的开关的开关状态(参见图2)。
17.据此,如果理论输出电压大于辅助电压,则操控/接通/闭合第一相a的桥支路的上部开关(晶体管)(参见图2)并且将开关状态从sa=0 转变到sa=1。如果辅助电压更低,则接通该桥支路的下部开关(在图 2中未示出)并且将开关状态从sa=1转变到sa=0。亦即进行相电势的反复转变或者说将第一相a的(实际)输出电压ua从正电势转变/切换到负电势,借助图2具体地从ua= uzk/2到ua=
‑
uzk/2(并且反之亦然)。
18.然而,因为出现接通和关断延迟、存在功率半导体的上升以及下降时间以及必须预留在关断与接通桥支路的开关之间的死区时间,所以在从开关状态sa=0过渡至开关状态sa=1与在从输出电压ua的(负) 电势
‑
uzk(
‑
uzk/2)按期望地/实际地转变至(正)电势 uzk( uzk/2) 之间得出一定的时间延迟δt1,参见在图3中的关系的示意图,以及在从开关状态sa=1过渡至开关状态sa=0与在从输出电压ua的(正) 电势 uzk( uzk/2)按期望地/实际地转变至(负)电势
‑
uzk(
‑
uzk/2) 之间得出一定的时间延迟δt2。上述观察涉及正电流ia。在图3中可看出,功率半导体的接通和关断过程是非对称的(例如δt1>δt2)。这在相电流ia为负的情况中是相反的。
19.出于更好的清晰性的原因(在图1和2中)未示出在实践中自然存在的、分别配置给各个功率半导体的续流二极管(freilaufdiode)。将电流从相应地在对角线上相对置的续流二极管换向到受操控的、但刚刚才要开始导通的功率半导体上的过程,在这一点上也不详细地探讨,因为该关系通常是已知的,例如参见rudolph,c.(2007). sensorlose feldorientierte und drehmomentoptimaledrehzahlregelung von asynchronmaschinen mit ber
ü
cksichtigung desd
ü
sseldorf,vdi第133页及以后各页。该公开内容借此完全地记录在当前的说明书中。
20.于是,如果当相x(a、b或c)的输出电压ux大于零(ua>0),则(在这里在当前的考虑中)在相应的相中得出与确定中间回路电流 izk有关的电流ix,这通过开关值sx=1表示(亦即如果ua<0,则将相电流ix与0相乘)。
21.因此,时间延迟δt1和δt2对在开关函数sx和相电流ix的基础上按照现有技术已知地确定中间回路电流izk有不利影响,因为各个相电流ix的(时间)变化与存在于一个开关周期上的实际施加的驱动输出电压ux有关,而与相应的开关函数sx无关,所述开关函数虽然与预先给定的理论输出电压/理论输出电压信号ua_soll相协调,但并没有考虑导体晶体管的上述非理想特性。
22.因此,按照本发明,在确定中间回路电流ix时考虑逆变器1的功率半导体的非理想特性,在这方面,代替在开关函数sx(和相电流ix) 的基础上确定中间回路电流izk,基于或者说根据各个相x(和相电流或输出电流ix)的实际的所测量的输出电压ux的确定/检测来确定(正的)中间回路电流izk。
23.换句话说,通过在逆变器1的实际运行期间测量各个相x的输出电压ux来确定中间回路电流izk,所述输出电压对于分别与流经各个相x中的电流ix相结合地确定中间回路电流izk来说是重要的,在此在如下情况下所测量的输出电压ux是重要的,即,在相电势是正的(或者取决于以何种考虑因素为基础,所述相电势是负的)时,亦即各个相电压ux的电势从负电势转变至正电势,直至该正电势又转变至负电势(或者根据考虑因素也是相反的)。总之,中间回路电流izk的确定 (仅)与各个相x的在两个(通过测量各个相x的输出电压ux
而确定的)转变之间、在一定程度上在所述转变期间的(所测量的)输出电压ux有关,所述转变是各个相x的输出电压ux的电势从负电势转变至正电势并且从正电势转变至负电势(或者在备选的考虑因素中是相反的)。
24.还换句话说,按照本发明通过如下方式查明或测量(所有)相x 的输出电压ux,即,记录(所有)相x的所查明的/说测量的输出电压ux的时间变化曲线或将其提供用于接着的处理/评价,其中,所述处理/评价在于,评价/进一步处理这些输出电压ux的时间变化曲线(亦即在一时间段上各个相的输出电压ux的多个测量值),在所述时间变化曲线中(相应的)输出电压ux(在从负电势转变至正电势/过零点后)大于0(ux>0),亦即所述相电势ux(相对于逆变器1/中间回路的中间点m测量的输出电压)是正的( uzk; uzk/2),即分析/评价这样的时间变化曲线,当所使用的半导体组件是理想的时,则所述时间变化曲线将由开关状态sx=1表示(或者在备选的考虑方案中是相反的)。
25.实际上,按照本发明,对于每个相x,将逆变器1的每个单独的相x的输出电压
‑
时间区域a~ux*δt与对各个相x的输出电压ux的测量相结合地考虑(并且至少间接地进一步处理),所述输出电压是在各个相x中相电流ix(在这里感兴趣地为正或者在可能的备选的考虑因素中为负)的实际原因并且所述输出电压对于确定中间回路电流izk 是重要的或有助于中间回路电流izk。
26.在第一实施方式中,在逆变器1的研究/开发/校准阶段、即在时间上在逆变器1的使用/批量投入使用之前,优选在适当的试验台上,借助于在逆变器1的运行期间测量各个相x的输出电压ux,确定各个输出电压ux的电势从负电势转变至正电势(的时刻、时间位置)或(以及)各个输出电压ux的电势从正电势转变至负电势(的时刻)(或者在备选的考虑因素中是相反的),亦即确定相应的输出电压ux的过零点,并且与此相关地,在考虑各个相x的同样查明/测量/记录的开关状态sx的情况下,校正/影响每个单独的相的此外继续使用的开关状态/开关值sx,从而对于每个单独的相x提供经校正的开关状态sx
′
以用于更精确地确定中间回路电流izk。结果,于是借助关系: izk=sa
′
*ia sb
′
*ib sc
′
*ic(在使用/批量投入使用阶段)确定中间回路电流izk。
27.假设第一相a的输出电压ua的电势从负电势转变至正电势(参见图2),于是在逆变器1的校准阶段,在(尽可能高分辨率地)测量出的输出电压ua的上升沿过程中,首先确定电势的实际进行转变的时刻、亦即代表这种转变的时刻(符号转变、过零点)。如在图2中示出的那样,在所测量的开关状态sa的上升沿(所测量的开关状态sa的上升沿开始上升的时刻)与在所测量的输出电压ua的变化中在输出电压ua的上升沿的范围内输出电压ua的电势转变(的时刻)之间得出时间偏移(=δt1)。类似地,也在下降沿方面得出全部。亦即,在(尽可能高分辨率地)测量出的输出电压ua的下降沿过程中,确定电势的实际进行转变的时刻、亦即代表这种转变的时刻(符号转变、过零点)。如在图2中示出的那样,在所测量的开关状态sa的下降沿(所测量的开关状态sa的下降沿开始下降的时刻)与在所测量的输出电压ua的变化中在输出电压ua的下降沿的范围内输出电压ua电势转变之间得出时间偏移(=δt2)。
28.因此,不仅对于上升沿、而且对于下降沿(为了应用于使用/批量投入使用阶段中)提供用于校正/影响每个单独的相的此外继续使用的开关状态/开关值sx的校正参量,其中,对于每个单独的相x借助经校正的开关状态sx
′
(在使用/批量投入使用阶段)借助于关系:izk=sa
′
*ia sb
′
*ib sc
′
*ic更精确地确定中间回路电流izk并且例如在第一相a方面
通过如下方式得出经校正的开关状态sa
′
,即,首先将第一延迟项(在上升沿方面的校正参量)添加/加入至所测量的开关状态sa,从而模拟时间延迟δt1,并且此外/在接着的过程中将另外的延迟项(在下降沿方面的校正参量)添加/加入至所测量的开关状态sa,从而模拟时间延迟δt2。
29.(涉及开关函数sx的上升/下降沿的)校正值sx
′
的确定特别是对于逆变器1的所有工作点以及对于在逆变器1的使用/批量投入使用阶段期间的后续使用进行。在此,也考虑相应的相电流ix的方向,因为如所描述的那样时间延迟δt1与δt2是不相等的并且该不相等性与相应的相电流ix是正还是负有关。将所述校正值保存在表格/特征曲线族中并且提供用于逆变器1的使用/批量投入使用阶段。
30.在另外的实施方式中,在确定中间回路电流izk时基于或者说根据对实际的、所测量的输出电压ux(和所测量的相电流ix)的确定通过如下方式考虑逆变器1的功率半导体的非理想特性,即,在逆变器 1的使用/批量投入使用阶段期间(优选持续地/连续地)进行对各个相 x的输出电压ux(和相电流ix)的尽可能高频/高采样率的测量,并且代替校正/影响各个相x的开关状态,进行对电压ux的标准化,特别是在0至1之间的值上进行,从而形成和提供标准化的电压值ux
′
,其中,根据该经标准化的(电压)值ux
′
、特别是基于关系 izk=ua
′
*ia ub
′
*ib uc
′
*ic来确定中间回路电流izk。
31.假设第一相a的输出电压ua的电势从负电势转变至正电势(参见图2),于是按照第二实施方式,在(尽可能高分辨率地/高频地)测量出的输出电压ua的上升沿过程中,确定电势的实际进行转变的时刻、亦即代表这种转变的时刻(符号转变、过零点)。类似地,也在下降沿方面得出全部。亦即,在(尽可能高分辨率地/高频地)测量出的输出电压ua的下降沿过程中,确定电势的实际进行转变的时刻、亦即代表这种转变的时刻(符号转变、过零点)。
32.在从负电势转变至正电势的时刻起,并且在直至从正电势至负电势的下一个转变的范围内进行对所测量输出电压ux的标准化/正规化,从而在该范围内提供经标准化的(和因此恒定的)值ux
′
(ux
′
=1),该值可以说替代开关函数sx或者说代表开关函数。除了所提到的范围,亦即当输出电压ux处于负电势时,通过如下方式进行标准化/正规化,即,给所测量的输出电压ux分配恒定的值ux
′
=0,该值可以说替代开关函数sx或者说代表开关函数。
33.如已经说明的那样,在第二实施方式方面重要的是,相对于用于操控功率半导体的切换或者pwm频率,对输出电压ux进行足够高频的测量,因此以便可以对所涉及的上述死区时间和主要是功率晶体管的非理想的开关特性进行映射或评价。特别是借助于delta
‑
sigma 转换器/调制器(delta
‑
sigma信号处理器)来测量输出电压ux,例如按照wo 2019 137 581 a1所描述的那样。
34.实际上,根据刚刚描述的另外的实施方式仅将输出电压ux的符号确定为相x的输出电压ux的电势从负电势转变至正电势以及反之亦然的指示/特征。这可以通过如下方式实现,即,借助于比较器电路确定何时或是否将输出电压ux与(模拟)阈值相比较,其中,根据该比较在超过或低于阈值的情况下,于是设置数字值(0或1),还参见de 102017 117 364 a1。
35.通过将电流与电压或(标准化的)输出电压ux与输出电流ix进行模拟乘法能实现对计算中间回路电流izk的进一步改进。为此使用模拟乘法器。按照本发明,为了考虑功率半导体的非理想特性/死区时间,该乘法基于在两个过零点/两个电势转变之间(实际)测量
的(标准化的)输出电压ux,参见上述实施方式,特别是在此也基于电压 ux的标准化的中间值在0至1之间,亦即例如中间值0.25和中间值 0.5等。
36.在又一个另外的实施方式中,利用模拟数字转换器(adu)进行输出电压ux的高频测量。为此,原则上快速的flash
‑
adu予以考虑,然而所述flash
‑
adu是成本耗费的。delta
‑
sigma
‑
adu与快速delta sigma信号处理器相结合是一种成本有利的备选方案。利用 delta
‑
sigma
‑
adu在两个过零点/两个电势转变之间测量(或者连续地测量并且仅在上述范围内经受评价)(相应的)输出电压ux并且将所产生的数字比特流(值=0或值=1)与相应的(同样借助 delta
‑
sigma
‑
adu测量的)相电流ix的数字值(值=0或值=1)相乘,亦即借助所提供的数字比特流对相应的相电流ix进行加权或特别是根据电势变化对于各相形成开关函数作为用于确定中间回路电流的基础,其方式为,同样使用代表开关函数的形式的或包含在开关函数中的数字比特流。通过数字的信号处理能够考虑上升或下降沿的影响。按照这种形式形成对中间回路电流izk的精确的计算。这种扩充级的另外的优点在于通过电驱动的模型将电流测量值ix与电压测量值ux 相关联,利用电压测量使电流传感器的特别高的诊断覆盖(根据 iso26262的诊断覆盖)达到99%的可能性。为此,将所测量的电流值ix与由利用所测量的电压ux激励驱动模型所产生的模型电流值ix
′
进行比较。这特别良好的实现,因为在驱动器上的真实的端电压是已知的并且不由于变流器而引入错误。总之,因此得出对中间回路电流 izk的精确的计算,所述中间回路电流的输入值、相电流ix具有高的诊断覆盖率。因此能满足技术安全概念中的中心要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。