技术特征:
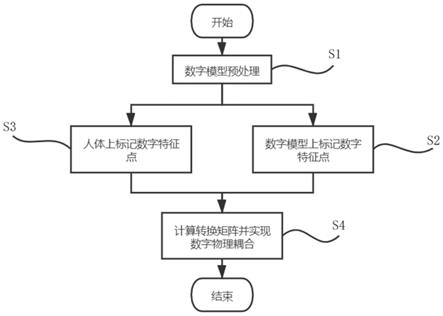
1.一种基于生物不变特征的数字物理耦合方法,其特征在于,包括以下步骤:对人体部位的数字模型进行预处理;在预处理后的所述数字模型上标记第一数字特征点;通过头戴式设备的相机,在现实中的所述人体部位上标记第二数字特征点,所述第一数字特征点与所述第二数字特征点一一对应,且位于同一虚拟世界坐标系下,所述虚拟世界坐标系为相机的虚拟世界坐标系;根据一一对应的所述第一数字特征点与所述第二数字特征点,对所述数字模型的位置进行变换,实现数字模型与人体部位的数字物理耦合。2.根据权利要求1所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,所述第一数字特征点的标记具体为:利用头戴式设备的远射线或凝视交互与数字模型表面形成焦点,根据该焦点的坐标生成所述数字模型上的第一数字特征点。3.根据权利要求2所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,通过远射线在数字模型上形成焦点的过程具体为:利用ar软件开发工具,将远射线与数字模型形成的焦点位置保存在远指针对象中,通过触发指针事件获取当前远指针的坐标,作为焦点坐标。4.根据权利要求1所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,所述第二数字特征点的标记具体为:在现实中的所述人体部分上设定可识别标记,利用计算机视觉识别所述可识别标记,并根据识别出的可识别标记计算出该可识别标记相对于相机的坐标位置,将该坐标位置作为所述第二数字特征点。5.根据权利要求1所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,对数字模型的位置进行变换具体为:根据所述虚拟世界坐标系中一一对应的至少两组第一数字特征点与第二数字特征点的坐标点集,利用奇异值分解法计算出旋转矩阵,利用计算得到的旋转矩阵和至少两组所述坐标点集的中心点计算出平移矩阵,将所述旋转矩阵与平移矩阵组合得到4x4的转换矩阵,利用该转换矩阵改变所述数字模型的位置。6.根据权利要求1所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,所述对人体部位的数字模型进行预处理具体为:将所述数字模型导入头戴式设备中的unity3d软件中,调整所述数字模型单位与unity3d软件的单位一致;将所述数字模型的中心与所述头戴式设备的相机的虚拟世界坐标系中心对齐。7.根据权利要求6所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,所述对人体部位的数字模型进行预处理还包括:对所述unity3d软件中的所述数字模型添加meshcollider组件。8.根据权利要求1所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,所述数字物理耦合方法包括:在头戴式设备的相机标记第二数字特征点前,对头戴式设备的相机进行校准。9.根据权利要求1所述的一种基于生物不变特征的数字物理耦合方法,其特征在于,所
述相机为头戴式设备的前置摄像头。10.一种基于生物不变特征的数字物理耦合系统,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,处理器调用所述计算机程序执行如权利要求1至9任一所述的方法的步骤。
技术总结
本发明涉及一种基于生物不变特征的数字物理耦合方法和系统,包括以下步骤:对人体部位的数字模型进行预处理;在预处理后的数字模型上标记第一数字特征点;通过头戴式设备的相机,在现实中的人体部位上标记第二数字特征点,第一数字特征点与第二数字特征点一一对应,且位于同一虚拟世界坐标系下,虚拟世界坐标系为相机的虚拟世界坐标系;根据一一对应的第一数字特征点与第二数字特征点,对数字模型的位置进行变换,实现数字模型与人体部位的数字物理耦合。与现有技术相比,本发明仅需要少量标记,可以在无准备的手术室直接使用,并且适用于人体多个部位,普适性好。普适性好。普适性好。
技术研发人员:戴凌磊 郝泳涛
受保护的技术使用者:同济大学
技术研发日:2021.07.06
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。