1.本发明属于船舶传感测量技术领域,具体涉及一种船舶吃水及海水密度测量系统。
背景技术:
2.目前,我国船舶具备舰艇吃水测量功能,但吃水数据准确性低,仅具备参考意义,无法作为基准数据进行总体性能相关计算。另外,我国船舶普遍不具备自动测量海水密度功能,无法计算得到准确的排水量信息,无法为管理提供决策支撑。
3.船舶一般可采用压力传感器进行吃水测量,压力传感器将与吃水成正比的液体静压力测量出来,通过液位变送器经过信号调理电路将水压信息转换成标准(电流或电压)信号输出,建立起输出信号与吃水的线性对应关系,实现对吃水的测量。该传感器安装于船舶艏艉底部舷侧附件中,舷侧附件透气管与大气连通,即可测量出变送器末端位置到自由液面的海水液面高度。其计算原理为:
4.当液位变送器投入到海水中某一深度时,传感器迎液面受到的压力为p=pgh p0,式中:
5.p:传感器迎液面所受压力,单位:pa;
6.p:被测液体密度,单位:kg/m3,取1025;
7.g:重力加速度,单位:m/s2,取9.8;
8.p0:液面上大气压,单位:pa
9.h:传感器所在位置吃水,单位:m
10.同时,通过透气管将液面上的大气压p0引入到传感器的背压腔,以抵消传感迎液面的p0,使传感器测得压力为:p=pgh,通过将压力信号p经电路转换放大、被补偿后以标准信号输出计算得到吃水h。
11.该测量方法测量不准确的主要原因为:1.随着全球可航海域的不断扩大,远洋船舶航行海域复杂多样,海水密度取固定值1025kg/m3存在较大误差。2.以常用的压力传感器ptx1830为例,测量精度较高,静水可达0.1%,但海洋环境复杂,起伏的波浪会使压力传感器输出数据变化剧烈。
12.以上主要原因造成吃水测量十分不准确,一般需要通过岸上查看或乘坐小艇绕船查看外板吃水标志获取较为准确的吃水数据。时间长,成本高,十分不便利。
13.另外我国船舶普遍不具备海水密度测量功能,主要通过手持式海水密度计测量,需要在船舶停泊或低速行驶时用水桶采样,倒入测量容器进行读数。存在过程繁琐、不能实时测量、量程小(海淡水种类较多)、采样有一定危险性、仪器易碎等缺陷。
技术实现要素:
14.本发明要解决的技术问题在于针对上述现有技术存在的吃水测量不准、不具备海水密度测量功能的不足,提供一种船舶吃水及海水密度测量系统,该装置可以同时准确测
量船舶吃水和海水密度,满足使用需求。
15.本发明为解决上述提出的技术问题所采用的技术方案为:
16.一种船舶吃水及海水密度测量系统,包括压力传感器,所述压力传感器安装于船舶底部舷侧附件中,通过舷侧附件与海水连通,测量该位置海水压力,舷侧附件通过第一透气管路与大气连通,透气管路用于排除管路中夹杂的气泡。测量系统还包括磁翻板液位计、液位变送器和信息处理模块;所述磁翻板液位计安装于水线附近,并通过海水管路连接至所述舷侧附件与海水连通,用于测量海水液面高度信息,磁翻板液位计上方通过第二透气管路与大气连通;所述液位变送器安装在磁翻板液位计上,液位变送器与所述信息处理模块信号连接,磁翻板液位计将磁力信号传递给液位变送器,液位变送器将磁力信号转换为电信号从而将海水液面高度信息传送给信息处理模块;所述压力传感器与所述信息处理模块信号连接,压力传感器将测量的海水压力信息传送给信息处理模块;所述信息处理模块根据压力传感器测量的压力数据和磁翻板液位计测量的船舶吃水数据,通过下式计算得到海水密度:
17.p=p/[g(h
‑
h0)]
[0018]
式中,p:海水密度;
[0019]
p:压力传感器测量的压力;
[0020]
g:重力加速度;
[0021]
h:磁翻板液位计测量的船舶吃水;
[0022]
h0:压力传感器距基线安装高度,固定值。
[0023]
上述方案中,所述磁翻板液位计的量程根据船舶吃水最大范围选取,最小值不大于船舶空载吃水,最大值不小于船舶最大吃水。
[0024]
上述方案中,压力传感器距基线安装高度h0在装置安装时进行测量,并录入信息处理模块中的计算程序。
[0025]
上述方案中,所述组合测量装置在艏艉各设置一套,沿主横隔壁安装,分别进行艏艉吃水测量,并计算艏艉海水密度平均值。
[0026]
上述方案中,海水进口与磁翻板液位计之间的海水管路上设有一段稳压波纹管,起到波浪稳定作用,避免液位计读数频繁波动。
[0027]
上述方案中,所述海水管路在海水入口附近连接有压缩空气吹洗管路,用于定期对海水管路内污物、海生物、结冰等污物进行吹洗。
[0028]
上述方案中,所述压力传感器采用投入式压力传感器。
[0029]
上述方案中,所述液位变送器采用干簧
‑
电阻式液位变送器。
[0030]
本发明的有益效果在于:
[0031]
1)采用压力传感器和磁翻板液位传感器组合可以同时准确测量船舶吃水和海水密度,充分发挥压力传感器压力测量准和磁翻板液位传感器可直接测量吃水的优势。解决传统仅通过投入式压力传感器造成的吃水测量不准的问题,同时为船舶提供海水密度测量功能。
[0032]
2)获取吃水和海水密度数据后,可利用邦氏曲线数据,获取当前排水量信息。辅以姿态、重心等数据,可进行舰艇稳性、不沉性计算,便于掌握船舶总体状态,提供航行安全、损管等方面辅助决策。
附图说明
[0033]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0034]
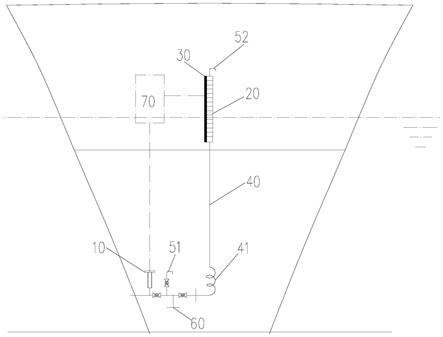
图1是本发明船舶吃水及海水密度测量系统的结构及安装示意图。
[0035]
图中:10、压力传感器;20、磁翻板液位计;30、液位变送器;40、海水管路;41、稳压波纹管;51、第一透气管路;52、第二透气管路;60、压缩空气吹洗管路;70、信息处理模块。
具体实施方式
[0036]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0037]
如图1所示,为本发明实施例提供的一种船舶吃水及海水密度测量系统,包括压力传感器10、磁翻板液位计20、液位变送器30和信息处理模块70。压力传感器10用于测量海水压力,它安装于船舶底部舷侧附件中,通过舷侧附件与海水连通,舷侧附件通过第一透气管路51与大气连通,透气管路用于排除管路中夹杂的气泡。压力传感器10与信息处理模块70信号连接,压力传感器10将测量的压力信息经信号处理电路转换放大成标准4
‑
20ma电流信号输出给信息处理模块70。磁翻板液位计20用于测量船舶吃水,它安装于水线附近,并通过海水管路40连接至舷侧附件与海水连通,磁翻板液位计20上方通过第二透气管路52与大气连通。液位变送器30安装在磁翻板液位计20上,磁翻板液位计20将磁力信号传递给液位变送器30,液位变送器30与信息处理模块70信号连接,液位变送器30将磁力信号经信号处理电路转换放大成标准4
‑
20ma电流信号输出给信息处理模块70。信息处理模块70根据压力传感器10测量的压力数据和磁翻板液位计20测量的船舶吃水数据计算得到海水密度。
[0038]
本发明吃水测量原理为:通过磁翻板液位计20与液位变送器30组合直接测量吃水,海水进口与磁翻板液位计20之间的海水管路40上设有一段稳压波纹管41,稳压波纹管41起波浪稳定作用,避免液位计读数频繁波动,同时通过信号后处理(如卡尔曼滤波等算法)输出较为稳定的吃水信息。另外可通过舱内肉眼查看方式读取原始吃水数据。
[0039]
海水密度测量原理为:在静水环境或风浪较小时,压力传感器10较为精确测量到压力信息p,则海水密度p为:
[0040]
p=p/[g(h
‑
h0)]
[0041]
式中,p:海水密度;
[0042]
p:压力传感器10测量的压力;
[0043]
g:重力加速度,取9.8;
[0044]
h:磁翻板液位计20测量的船舶吃水;
[0045]
h0:压力传感器10距基线安装高度,固定值。
[0046]
由上式可知,通过压力传感器10测量的压力数据和磁翻板液位计20测量的船舶吃水可以计算得到海水密度。
[0047]
本发明船舶吃水测量精度为0.2%;静水环境下,海水密度测量精度约为0.3%。
[0048]
进一步优化,本实施例中,磁翻板液位计20的量程根据船舶吃水最大范围选取,即最小值不大于船舶空载吃水,最大值不小于船舶最大吃水。
[0049]
进一步优化,本实施例中,海水管路40在海水入口附近连接有压缩空气吹洗管路60,用于定期对海水管路40内污物、海生物、结冰等进行吹洗清洁。
[0050]
进一步优化,本实施例中,压力传感器10可采用投入式压力传感器,如ptx1830/option型液位传感器。
[0051]
进一步优化,本实施例中,磁翻板液位计20可采用hz
‑
uhz系列防腐磁翻板液位计。
[0052]
进一步优化,本实施例中,液位变送器30可采用干簧
‑
电阻式液位变送器30。
[0053]
将船舶吃水及海水密度测量系统按图1所示方式装舰,在艏艉各设置一套,沿主横隔壁安装,分别进行艏艉吃水测量,并计算艏艉海水密度平均值。安装时对压力位传感器距基线安装高度h0进行测量,以便录入处理模块中的计算程序。
[0054]
装船完成后,分别进行半坐墩条件传感器标校,半坐墩条件下对吃水和密度数据进行实船测量。通过舷外吃水标志和坞内吃水标志读取结果进行实船标校;通过海水密度计进行实际水密度测量,根据实测结果进行实船标校。船舶航行时,实时可获取吃水数据,静水或锚泊靠岸时读取密度数据,航行时密度数据作为参考。
[0055]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。