1.本发明属于人体外骨骼助力技术领域,具体涉及一种上肢外骨骼助力装置。
背景技术:
2.随着社会和科技的发展,越来越多的人在电脑前办公,长久的坐姿对身体有极大的负担。为了增强身体素质,人们开始选择去健身房或者一些公共的体育器材场所进行锻炼,比如对于胸大肌和三角肌的锻炼等等。目前,已有的一些锻炼胸大肌和三角肌的健身方法主要有史密斯卧推、平板杠铃卧推、下斜杠铃卧推、哑铃卧推、哑铃飞鸟等。这些运动有效的刺激了胸大肌和三角肌,有利于身体的锻炼,但是对于初学者以及较长时间的锻炼者来说面临着力量不足或者力竭导致身体被杠铃或者哑铃砸伤的风险。
技术实现要素:
3.本发明装置的目的是为胸大肌和三角肌力量较弱者以及长时间训练胸大肌和三角肌力竭者提供一种上肢外骨骼助力装置,以便训练者能够很好的完成训练动作,同时能够利用小臂和脚蹬助力装置对哑铃和杠铃等重物起到支撑作用,避免因为大臂力量不足导致训练者面临被砸伤的风险。
4.为实现上述目的,本发明采用的技术方案是:
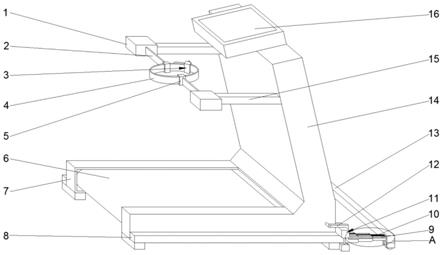
5.一种上肢外骨骼助力装置,包括机架、大小臂装置、助力机构和躺垫;所述大小臂装置通过大臂固定架安装在机架的前方,所述助力机构设在机架上,所述躺垫设在机架的顶面。
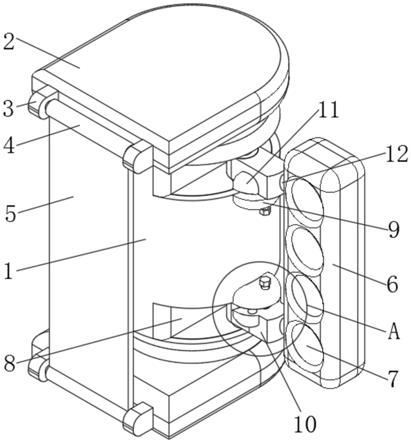
6.进一步地,所述机架由上底板、下底板、斜支撑架、竖直支撑杆、十字支撑杆、凸轮固定架、两个大臂固定架、弹簧固定架、脚蹬固定架和脚蹬组成;所述上底板位于机架上部;所述下底板位于机架下部;所述斜支撑架安装在上底板和下底板之间;所述竖直支撑杆安装在斜支撑架前端;所述十字支撑杆通过销钉与斜支撑架中部连接,并且十字支撑杆的一端通过销钉与上底板连接;所述两个大臂固定架对称安装在机架前方两侧;所述凸轮固定架安装在大臂固定架的外侧,所述弹簧固定架安装在机架后端两侧;所述脚蹬固定架对称安装在机架的后端两侧;所述脚蹬通过转轴与脚蹬固定架连接。
7.进一步地,所述大小臂装置由大臂、小臂、绑带、调节按钮、三角凸台、长连杆、短连杆、推杆、滚子组成;所述大臂的一端和大臂固定架通过双头螺柱连接,另一端通过销钉与小臂连接;所述长连杆的一端与大臂的底部连接,另一端与推杆活动相连;所述短连杆的一端与大臂底部连接,另一端与推杆活动相连;所述滚子固定连接在推杆底部;所述调节按钮设在绑带上,所述绑带设在大臂与小臂上;所述三角凸台对称设在靠近大臂的小臂上的前端两边。
8.进一步地,所述助力机构由绕线轮、凸轮、牵引绳、带轮、弹簧组成;所述凸轮相切于滚子;所述绕线轮3
‑
1与凸轮3
‑
2固定在同一转轴上,并且绕线轮与凸轮通过转轴可旋转的固定在凸轮固定架上;所述弹簧的一端固定在弹簧固定架上,另一端与牵引绳的一端相
连接;所述牵引绳另一端绕绕线轮一圈;所述带轮通过转轴与脚蹬连接,并且位于机架后部;
9.进一步地,所述躺垫由头部躺垫、背部躺垫、腰部躺垫和臀部躺垫组成;所述躺垫由头部躺垫、背部躺垫、腰部躺垫和臀部躺垫通过依次固定在机架顶面的前部、中部与后部。
10.优选地,所述牵引绳为钢丝绳。
11.与现有技术相比,本发明具有以下优点:
12.本发明装置通过脚来提供动力,实现了无源,对人和环境起到了保护作用。
13.本发明装置大臂和小臂内侧的三角凸台可防止训练者力竭而小臂向内侧弯曲小于90度,导致杠铃或者哑铃等重物坠落,对训练者造成伤害。
14.本发明装置便于使用,并且可以通过调节小臂和大臂上的调节按钮满足不同体型的人员使用。
附图说明
15.图1是本发明的结构示意图;
16.图2是本发明中机架的结构示意图;
17.图3是本发明中大小臂装置的结构示意图;
18.图4是发明中助力机构的结构示意图;
19.图5是发明中躺垫结构示意图。
具体实施方式
20.下面结合附图进一步详细描述本发明的技术方案。
21.如图1所示,本实施例所述一种上肢外骨骼助力装置,包括机架1、大小臂装置2、助力机构3和躺垫4;所述大小臂装置2通过大臂固定架1
‑
2安装在机架1的前方,所述助力机构3设在机架1上,所述躺垫4设在机架1的顶面。
22.如图2所示,所述机架1由上底板1
‑
1、下底板1
‑
9、斜支撑架1
‑
7、竖直支撑杆1
‑
10、十字支撑杆1
‑
6、凸轮固定架1
‑
8、两个大臂固定架1
‑
2、弹簧固定架1
‑
5、脚蹬固定架1
‑
4和脚蹬1
‑
3组成;所述上底板1
‑
1位于机架1上部;所述下底板1
‑
9位于机架1下部;所述斜支撑架1
‑
7安装在上底板1
‑
1和下底板1
‑
9之间;所述竖直支撑杆1
‑
10安装在斜支撑架1
‑
7前端;所述十字支撑杆1
‑
6通过销钉与斜支撑架1
‑
7中部连接,并且十字支撑杆1
‑
6的一端通过销钉与上底板1
‑
1连接;所述两个大臂固定架1
‑
2对称安装在机架1前方两侧;所述凸轮固定架1
‑
8安装在大臂固定架1
‑
2的外侧,所述弹簧固定架1
‑
5安装在机架1后端两侧;所述脚蹬固定架1
‑
4对称安装在机架1的后端两侧;所述脚蹬1
‑
3通过转轴与脚蹬固定架1
‑
4连接。
23.如图3所示,所述大小臂装置2由大臂2
‑
2、小臂2
‑
5、绑带2
‑
1、调节按钮2
‑
4、三角凸台2
‑
3、长连杆2
‑
9、短连杆2
‑
6、推杆2
‑
8、滚子2
‑
7组成;所述大臂2
‑
2的一端和大臂固定架1
‑
2通过双头螺柱连接,另一端通过销钉与小臂2
‑
5连接;所述长连杆2
‑
9的一端与大臂2
‑
2的底部连接,另一端与推杆2
‑
8活动相连;所述短连杆2
‑
6的一端与大臂2
‑
2底部连接,另一端与推杆2
‑
8活动相连;所述滚子2
‑
7固定连接在推杆2
‑
8底部;所述调节按钮2
‑
4设在绑带2
‑
1上,所述绑带2
‑
1设在大臂2
‑
2与小臂2
‑
5上;所述三角凸台2
‑
3对称设在靠近大臂2
‑
2的小臂
2
‑
5上的前端两边。
24.如图4所示,所述助力机构3由绕线轮3
‑
1、凸轮3
‑
2、牵引绳3
‑
3、带轮3
‑
4、弹簧3
‑
5组成;所述凸轮3
‑
2相切于滚子2
‑
7;所述绕线轮3
‑
1与凸轮3
‑
2固定在同一转轴上,并且绕线轮3
‑
1与凸轮3
‑
2通过转轴可旋转的固定在凸轮固定架1
‑
8上;所述弹簧3
‑
5的一端固定在弹簧固定架1
‑
5上,另一端与牵引绳3
‑
3的一端相连接;所述牵引绳3
‑
3另一端绕绕线轮3
‑
1一圈;所述带轮3
‑
4通过转轴与脚蹬1
‑
3连接,并且位于机架1后部;所述牵引绳3
‑
3为钢丝绳。
25.如图5所示,所述躺垫4由头部躺垫4
‑
1、背部躺垫4
‑
2、腰部躺垫4
‑
3和臀部躺垫4
‑
4组成;所述躺垫4由头部躺垫4
‑
1、背部躺垫4
‑
2、腰部躺垫4
‑
3和臀部躺垫4
‑
4通过依次固定在机架1顶面的前部、中部与后部。
26.本发明的使用过程及工作原理如下:
27.当训练者躺在躺垫4上时,双臂放在大小臂装置2内,双脚放在脚蹬1
‑
3上,所述弹簧3
‑
5处于一定拉伸状态,凸轮3
‑
2近端与推杆2
‑
8底部的滚子2
‑
7相接触。训练者通过踩动脚蹬1
‑
3带动带轮3
‑
4上的牵引绳3
‑
3转动,使牵引绳3
‑
3缩短;由于牵引绳3
‑
3收缩,牵引绳3
‑
3通过摩擦力使绕线轮3
‑
1转动;绕线轮3
‑
1与凸轮3
‑
2固定在同一转轴上,故绕线轮3
‑
1带动凸轮3
‑
2转过相同的角度;凸轮3
‑
2与滚子2
‑
7相切,凸轮3
‑
2转动时,凸轮3
‑
2由近端变成远端与滚子2
‑
7相接触,从而带动推杆2
‑
8向上运动;长连杆2
‑
9一端与推杆2
‑
8相连,另一端与大臂2
‑
2底部相连;短连杆2
‑
6一端与推杆2
‑
8相连,另一端与大臂2
‑
2底部相连;推杆上下运动时,带动长连杆2
‑
9和短连杆2
‑
6运动,故大臂2
‑
2和小臂2
‑
5被长连杆2
‑
9和短连杆2
‑
6带动抬高;当脚蹬1
‑
3反转时,弹簧3
‑
5拉伸牵引回到初始状态,牵引绳3
‑
3伸长,牵引绳3
‑
3的伸长带动绕线轮3
‑
1转动,绕线轮3
‑
1带动凸轮3
‑
2转动,凸轮3
‑
2带动推杆2
‑
8向下运动,与推杆2
‑
8相连的长连杆2
‑
9和短连杆2
‑
6带动大臂2
‑
2和小臂2
‑
5向下运动,回到水平位置,完成一次大臂2
‑
2和小臂2
‑
5抬升动作,从而达到上肢助力的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。