1.本实用新型涉及农业机械装置的技术领域,特别是野草莓采摘收集装置的技术领域。
背景技术:
2.野草莓,是一种蔷薇科多年生草本植物,植株较为矮小,生长在林下、草地、坡地等处,采摘收集不易。草莓在西方被推崇为防治心血管疾病的良药,经常食用对健康大有益处。
3.草莓果实易损伤会影响保存,所以现有方式采用手工采摘,尽量保证果实完整,而且野生室外环境下的草莓相比于大棚人工种植的草莓,采收环境更加困难,植株的生长高度和位置都不确定,因此十分耗费人力;而现有的大型采摘机器人,因为成本过高,而且对草莓种植方式和位置均有一定要求,因此难以使用在野外环境,还是需要人工采摘。而且采摘设备,一般只能连草莓茎一同切割,其中一串里面会有还未成熟的果实一起被切下,后续还需要再进行分拣,影响收获率。
技术实现要素:
4.本实用新型的目的就是解决现有技术中的问题,提出一种野草莓采摘收集装置,能够识别出成熟果实进行选择性采摘,不仅能够有效提高草莓采摘效率和降低采摘人员的工作强度,而且能够减少对草莓果实的损伤,操作简单,使用方便。
5.本实用新型为克服现有技术存在的问题,提供如下技术方案:
6.一种野草莓采摘收集装置,包括
7.采摘组件,所述采摘组件选择成熟的草莓果实并对草莓茎进行切割;
8.收集组件,所述收集组件将采摘组件采摘的草莓果实进行收集;
9.其中,所述采摘组件包括采摘爪,采摘爪底部连接有输送通道,采摘爪通过输送通道连接到收集组件上;所述采摘爪安装在支撑臂上,所述收集组件侧面安装有电控箱,所述支撑臂连接电控箱。
10.在本技术公开的野草莓采摘收集装置中,可选地,所述采摘爪为两个弧形的撑开爪组成,两个撑开爪顶部内侧相对位置安装有切割刀片,采摘爪为弧形网状结构。
11.在本技术公开的野草莓采摘收集装置中,可选地,所述撑开爪底部开口连通输送通道,所述采摘爪底部安装有驱动杆,采摘爪与驱动杆之间安装有铰链轴,所述驱动杆连接电控箱。
12.在本技术公开的野草莓采摘收集装置中,可选地,所述支撑臂上安装有视觉采集器,视觉采集器位于采摘爪下方。
13.在本技术公开的野草莓采摘收集装置中,可选地,所述支撑臂为伸缩杆结构,所述支撑臂上设有转轴。
14.在本技术公开的野草莓采摘收集装置中,可选地,所述收集组件包括收集箱,所述
收集箱内侧面设有网板安装扣,网板安装扣上安装网板。
15.在本技术公开的野草莓采摘收集装置中,可选地,所述收集箱底部安装有履带轮。
16.在本技术公开的野草莓采摘收集装置中,可选地,所述电控箱安装有行走轮。
17.本实用新型的有益效果是:
18.本实用新型能够识别出成熟果实进行选择性采摘,不仅能够有效提高草莓采摘效率和降低采摘人员的工作强度,而且能够减少对草莓果实的损伤,操作简单,使用方便,适宜大棚收获也适宜户外复杂地形的采摘工作。
19.本实用新型的特征及优点将通过实施例结合附图进行详细说明。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1是一种野草莓采摘收集装置的整体结构示意图;
22.图2是采摘组件的内部结构示意图;
23.图3是收集组件的内部结构示意图。
24.图中
[0025]1‑
采摘组件;11
‑
采摘爪;12
‑
视觉采集器;13
‑
支撑臂;14
‑
切割刀片;15
‑
铰链轴;16
‑
驱动杆;2
‑
电控箱;21
‑
行走轮;3
‑
输送通道;4
‑
收集组件;41
‑
收集箱;42
‑
网板;43
‑
网板安装扣;44
‑
履带轮。
具体实施方式
[0026]
在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本实用新型的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
[0027]
在本实用新型申请实施例的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0028]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型申请实施例的描述中,“多个”的含义是两个或者两个以上,除非另有明确具体的限定。
[0029]
下文的公开提供了许多不同的实施方式或例子用来实现本实用新型的不同结构。为了简化本实用新型的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本实用新型。此外,本实用新型申请实施例可以在不同例子中重
复参考数字或参考字母,这种重复只是为了简化和清楚目的,其本身不指示所讨论各种实施方式或/和设置之间的关系。
[0030]
下面结合附图对本技术的实施例进行详细说明。
[0031]
如图1、图2、图3,本实用新型,一种野草莓采摘收集装置,包括
[0032]
采摘组件1,所述采摘组件1选择成熟的草莓果实并对草莓茎进行切割;
[0033]
收集组件4,所述收集组件4将采摘组件1采摘的草莓果实进行收集;
[0034]
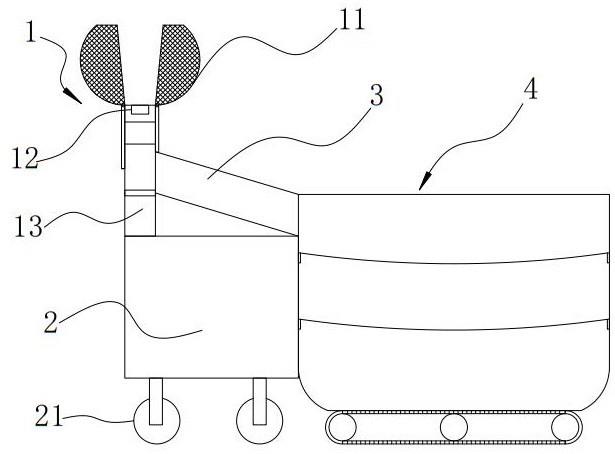
其中,所述采摘组件1包括采摘爪11,采摘爪11底部连接有输送通道3,采摘爪11通过输送通道3连接到收集组件4上;所述采摘爪11安装在支撑臂13上,所述收集组件4侧面安装有电控箱2,所述支撑臂13连接电控箱2。
[0035]
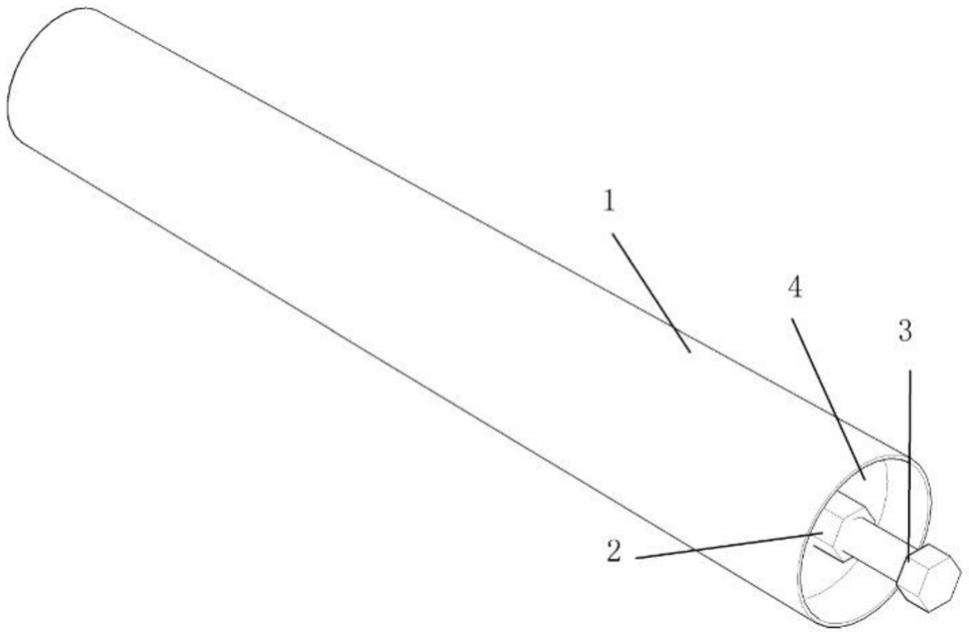
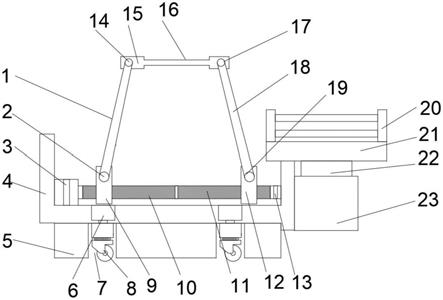
所述采摘爪11为两个弧形的撑开爪组成,两个撑开爪顶部内侧相对位置安装有切割刀片14,采摘爪11为弧形网状结构。
[0036]
所述撑开爪底部开口连通输送通道3,所述采摘爪11底部安装有驱动杆16,采摘爪11与驱动杆16之间安装有铰链轴15,所述驱动杆16连接电控箱2。
[0037]
所述支撑臂13上安装有视觉采集器12,视觉采集器12位于采摘爪11下方。视觉采集器12根据草莓红程度的不同颜色来判断成熟程度,采集图像数据传输到电控箱2中的控制器,判断是否进行采摘。
[0038]
所述支撑臂13为伸缩杆结构,所述支撑臂13上设有转轴。通过伸缩杆结构可以调整支撑臂13的高度方向上的位置,通过转轴结构可以调整支撑臂13的水平方向上的位置。
[0039]
所述收集组件4包括收集箱41,所述收集箱41内侧面设有网板安装扣43,网板安装扣43上安装网板42。网板42通过网板安装扣43将收集箱41内的收集空间划分为多层,多层的收集空间,防止底部的草莓被挤压而损坏。所述网板42形成弧形曲面,防止草莓碰伤。
[0040]
所述收集箱41底部安装有履带轮44。因为采摘场地多为室外林地、坡地,为了便于行走,不易翻倒,没有使用普通小轮而使用越障能力更好的履带轮。
[0041]
为了保持装置平衡,便于移动,所述电控箱2安装有行走轮21。用以配合履带轮44。
[0042]
使用过程:
[0043]
采摘收集装置行走到采摘位置,支撑臂13上的视觉采集器12,识别出成熟的果实,采摘爪11的两个弧形的撑开爪张开,支撑臂13调整位置包裹住草莓果实后,两个撑开爪闭合,切割刀片14将草莓茎切断,草莓果实通过采摘爪11底部的输送通道3落入收集箱41中收集。一边收集,一边加入网板42分隔,达到一定数量后,可以通过取出网板42倒出草莓。
[0044]
以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。