1.本实用新型涉及医疗器械技术领域,具体涉及的是一种桡动脉穿刺置管垫。
背景技术:
2.桡动脉穿刺置管是麻醉及icu连续血压(血流动力学)监测中的常用技术。桡动脉穿刺时,需要患者抬高上臂,下压手腕,使腕部保持合适的背伸度以充分暴露动脉,从而提高桡动脉穿刺置管的成功率。目前,医院用于固定患者手腕的工具较为简陋,常就地取材,如软垫、方巾、输液瓶等,这种方式使腕部不易固定,影响桡动脉穿刺置管的进行。
3.为了解决上述问题,专利号为zl201821648667.2(授权公告号为cn209074924u)的中国实用新型专利公开了一种桡动脉穿刺体位固定装置,包括断面呈弧形结构的硬质臂托,臂托的前端铰接有与其结构相同的手部固定托板,其后端铰接有与其结构相同的延长托板,臂托前、后两端的铰接处铰轴上设置有角度定位机构,该角度定位机构包括沿周向均匀间隔布设于所述铰轴外周面上的若干定位弹珠,在与铰轴相铰接的外套轴内壁上开设有与所述定位弹珠相适配的定位凹槽;臂托、手部固定托板和延长托板的外表面包覆有一体式的柔性垫,柔性垫外活动套装有一端开口的外套;外套上表面活动粘固有卡放于手部固定托板内的柔性手部垫块,与柔性手部垫块中部相对的外套下表面上沿宽度方向固设有弹性绑带,弹性绑带的两端延伸至手部固定托板上方,其端部设置有相互适配的魔术粘。
4.上述桡动脉穿刺体位固定装置通过在臂托前端铰接手部固定托板,并通过定位弹珠和定位凹槽的配合结构实现臂托和手部固定托板之间的角度定位,从而实现患者桡动脉穿刺置管时手腕的相对固定,但是,该桡动脉穿刺体位固定装置存在以下不足:
①
该定位弹珠通过弹簧支撑而始终具有进入定位凹槽的运动趋势以实现现臂托和手部固定托板之间的角度定位,由于弹簧的支撑能力较弱且长时间使用后弹性性能减弱,导致臂托和手部固定托板之间的角度定位不牢,一旦患者腕部施力过大就容易改变臂托和手部固定托板之间的夹角从而改变腕部背伸度,这种情形如果发生在患者桡动脉穿刺置管操作中,会给患者的带来极大的危险性;
②
该角度定位结构尺寸较小,需要在铰轴外周面安装多个弹簧和定位弹珠、在外套轴中设置定位凹槽,造成该角度定位结构加工难度较大,制造比较困难;
③
臂托和手部固定托板、臂托和延长托板均在两者下部铰接,使臂托和手部固定托板的铰接处、臂托和延长托板铰接处的上表面存在缝隙,当臂托和手部固定托板、臂托和延长托板之间的夹角发生变化时,该缝隙容易夹肉,需要在缝隙中覆盖硅胶,并在臂托、手臂固定板和延长托板外套设外套以填充该缝隙,导致该桡动脉穿刺体位固定装置结构复杂,生产成本增加。
技术实现要素:
5.本实用新型所要解决的第一个技术问题是针对上述的技术现状而提供一种支撑臂之间的夹角不容易发生变化的桡动脉穿刺置管垫,能够稳定地将患者手腕背伸度约束于桡动脉穿刺置管操作合适的范围。
6.本实用新型所要解决的第二个技术问题是针对上述的技术现状而提供一种便于制造和加工的桡动脉穿刺置管垫。
7.本实用新型所要解决的第三个技术问题是针对上述的技术现状而提供一种桡动脉穿刺置管垫,无需包覆外套也不容易夹肉,结构更加简单,生产成本降低。
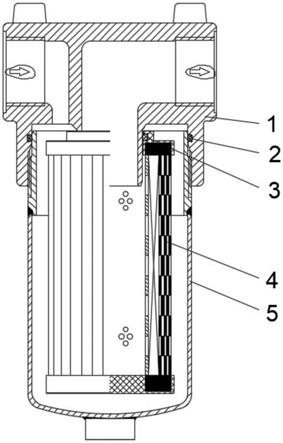
8.本实用新型解决上述第一个技术问题所采用的技术方案为:一种桡动脉穿刺置管垫,其特征在于:包括基座,所述基座上安装有第一支撑臂和第二支撑臂,所述第一支撑臂和第二支撑臂首尾相接,且所述第一支撑臂和第二支撑臂的连接处悬于所述基座上方,所述基座、所述第一支撑臂和第二支撑臂共同形成三角结构,且所述第一支撑臂和所述第二支撑臂之间的夹角使处于背伸状态下的腕部贴合所述第一支撑臂和所述第二支撑臂的连接处;所述第一支撑臂和所述第二支撑臂中至少一个安装有约束件。
9.为了使第一支撑臂和基座之间、第一支撑臂和第二支撑臂之间的连接更加牢固且灵活,所述第一支撑臂的第一端与所述基座铰接,所述第一支撑臂的第二端与所述第二支撑臂的第一端铰接,且所述第二支撑臂的第二端与所述基座之间设有角度限制机构,所述角度限制机构用于限定所述第一支撑臂和所述第二支撑臂之间的夹角角度。由于第一支撑臂的第二端和第二支撑臂的第一端铰接设置,为了使第二支撑臂能够顺场地相对于第一支撑臂旋转,第一支撑臂和第二支撑臂之间形成有缝隙,而第一支撑臂、第二支撑臂和基座三者稳定的支撑结构使第一支撑臂和第二支撑臂之间的夹角不容易发生变化,导致第一支撑臂和第二支撑臂之间的缝隙不容易发生变化,使该缝隙不容易夹肉。
10.本实用新型解决上述第二个技术问题所采用的技术方案为:所述的角度限制机构包括插入部和供所述插入部插设的插槽,所述插入部设于第二支撑臂的第二端和所述基座上的其中一个,所述插槽设于所述第二支撑臂的第二端和所述基座上的其中另外一个。通过插入部和插槽的配合设计,使角度限制机构更加简单,相比于定位弹珠和定位凹槽的结构,加工难度降低,更加便于制造和加工。
11.为了便于调整第一支撑臂和第二支撑臂之间的夹角从而调节患者的腕部背伸度,所述第一支撑臂和第二支撑臂之间的夹角具有至少两个角度,且所述第一支撑臂和第二支撑臂之间的夹角角度通过所述角度限制机构进行调整。
12.为了使角度限制机构便于对第一支撑臂和第二支撑臂之间的夹角角度进行调整,所述插入部设于所述第二支撑臂的第二端,所述的插槽有至少两个,且沿所述基座的长度方向间隔设置。当插入部插入不同的插槽中,能够使第一支撑臂和第二支撑臂之间的夹角定位在不同的角度。
13.为了在简化插入部结构的同时使插入部插入插槽时更加稳定,所述第二支撑臂的第二端端部形成所述的插入部,所述插槽成型于所述基座上,所述插槽为与所述插入部相适配的斜槽。无需额外对第二支撑臂进行加工以形成插入部,且插槽为斜槽的设计能够增加插入部和插槽的接触面积,使插入部和插槽更加贴合,插入部不容易发生偏移。
14.本实用新型解决上述第三个技术问题所采用的技术方案为:所述第一支撑臂的第二端端部和所述第二支撑臂的第一端端部均为圆弧面,所述第一支撑臂的第二端中部和第二支撑臂的第一端中部铰接,且第一支撑臂的上表面和第二支撑臂的上表面在所述第一支撑臂和所述第二支撑臂的连接处平滑过渡。即使第二支撑臂相对于第一支撑臂旋转而使两者之间的夹角发生变化,第一支撑臂和第二支撑臂之间的缝隙轴向间距不会发生改变,使
2能够顺场地相对于第一支撑臂1旋转,第一支撑臂1和第二支撑臂2之间形成有缝隙 x,而第一支撑臂1、第二支撑臂2和基座4三者稳定的支撑结构使第一支撑臂1和第二支撑臂2之间的夹角不容易发生变化,导致第一支撑臂1和第二支撑臂2之间的缝隙 x不容易发生变化,使该缝隙x不容易夹肉。如图1所示,第一支撑臂1的第二端端部和第二支撑臂2的第一端端部均为圆弧面,第一支撑臂1的第二端中部和第二支撑臂2 的第一端中部铰接,且第一支撑臂1的上表面和第二支撑臂2的上表面在所述第一支撑臂1和第二支撑臂2的连接处平滑过渡;即使第二支撑臂2相对于第一支撑臂1旋转而使两者之间的夹角发生变化,第一支撑臂1和第二支撑臂2之间的缝隙x轴向间距不会发生改变,使该缝隙x无需设置外套也不容易夹肉,结构更加简单,生产成本降低。
26.如图1所示,该角度限制机构包括插入部21和供插入部21插设的插槽41,该插入部21设于第二支撑臂2的第二端,插槽41设于基座4的第二端,通过插入部21和插槽41的插接配合使第二支撑臂2与第一支撑臂1的相对位置固定,即第一支撑臂1和第二支撑臂2之间的夹角α角度被限定,使角度限制机构结构更加简单,易于制造和加工。在其他实施例中,还可以是,插入部21设于基座4的第二端,插槽41设于第二支撑臂2的第二端。如图1所示,第二支撑臂2的第二端端部形成该插入部21,插槽41 成型于第二支撑臂2的第二端,且插槽41为与插入部21适配的斜槽,不仅无需额外对第二支撑臂2进行加工以形成插入部21,还能够增大插入部21和插槽41的接触面积,插入部21在插槽41中不容易发生偏移,插入部21和插槽41的插配关系更加稳定。
27.如图1所示,第一支撑臂1和第二支撑臂2之间的夹角α具有至少两个角度,且第一支撑臂1和第二支撑臂2之间的夹角α角度通过该角度限制机构进行调整。具体地,该插槽41有至少两个,且沿基座4的长度方向间隔设置,通过将插入部21插设于不同的插槽41中以改变第一支撑臂1和第二支撑臂2之间的夹角α角度,从而调节患者腕部的背伸度。在其他实施例中,还可以是,插槽41的数量为1个,插入部21有至少两个,且间隔设于第二支撑臂2的第二端,以实现第一支撑臂1和第二支撑臂2之间的夹角α角度调整。本实施例中插槽21的数量为3个。
28.为了使患者腕部具有合适的背伸度,第一支撑臂1和第二支撑臂2之间的夹角α角度为110
°
~150
°
。其中,当插入部21从左到右依次对应插入3个插槽41中时,第一支撑臂1和第二支撑臂2之间的夹角α角度依次为110
°
~130
°
、125
°
~145
°
、135
°
~155
°
。为了使患者腕部抬高到合适的高度,第一支撑臂1的第二端和第二支撑臂2的第一端的铰接处的高度h为6~11cm。本实施例中,当插入部21从左到右依次对应插入3个插槽41中时,第一支撑臂1和第二支撑臂2之间的夹角α角度依次为120
°
、135
°
、145
°
,第一支撑臂1的第二端和第二支撑臂2的第一端的铰接处的高度h依次为6cm、8.5cm、 11cm。为了使患者手臂、手腕搁置在桡动脉穿刺置管垫上更加舒适,第一支撑臂1的长度为16~20cm,宽度为5.5~8cm;第二支撑臂2的长度为13~16cm,宽度为5.5~8cm;基座4长度为30~34cm,宽度为7~10cm。可以理解的是,第一支撑臂1和第二支撑臂2的局部长度和/或宽度允许低于或者超出前述范围,以使第一支撑臂1和第二支撑臂 2便于连接或者连接得更牢固。
29.为了使患者手掌更加舒适,本实施例中的约束件3为连接在第二支撑臂2上的松紧带。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。