1.本发明属于医疗器械领域,涉及一种康复训练设备,特别是涉及一种基于 扇形齿轮传动机构的手功能康复训练装置。
背景技术:
2.市场调研发现,中年人脑卒中风险更为集中,引发了脑卒中年轻化趋势。 脑卒中患者发病后,大部分遗留有不同程度的肢体功能障碍,另外还有因疾病 预防不足所导致偏瘫、手外伤、脊髓损伤、帕金森病和老年痴呆等病因造成的 手部残疾患者,严重影响其生活、工作及学习,同时也给家庭和社会带来了沉 重负担。由于手功能较下肢功能精细,因此手功能障碍较下肢功能障碍更难恢 复,在康复治疗过程中,手功能障碍的改善对于提高患者自身能力和生活能力 非常有意义。
3.传统的手功能训练器,操作时手部握紧,这种手功能训练器只能对手部做 单向的握紧训练,康复效果缓慢。后来出现了外骨骼式的手功能训练器,这种 手功能训练器虽然可以对手部做握紧或张开的训练,但是这种手功能训练器结 构复杂,零件过多导致重量较重,操作不灵活,对使用者的手部造成额外的负 担,且易在执行操作上会发生卡滞现象,影响训练效果。
4.此外,在手功能训练过程中,大拇指训练是最核心的因素,拇指的功能除 了能实现弯曲、外展外,还可以绕拇指下部关节做360度旋转,转动灵活;同 时配合四指能实现各种伸展、抓握动作。当拇指患病或者受伤时,常需要使用 拇指训练装置来辅助进行拇指的功能性康复训练;具体地是实现拇指的弯曲, 配合四指实现手部的抓握功能。现有的外骨骼式手功能训练器,可以对手部做 握紧或张开的训练,其拇指部位通过推杆电机带动多连杆进行屈伸运动,但是 屈伸轨迹单一,仅在同一平面内运动,不符合人体工程学中大拇指抓握运动轨 迹。
5.基于此,提出一种结构轻巧且训练效果好的手功能训练器,以实现对手部 功能的恢复训练,尤其是对大拇指的康复训练,尤为重要。
技术实现要素:
6.本发明的目的是提供一种基于扇形齿轮传动机构的手功能康复训练装置, 以解决上述现有技术存在的结构复杂、零件过多导致重量较重,且训练方式不 符合人体工程学中大拇指抓握运动轨迹的问题。
7.为实现上述目的,本发明提供了如下方案:
8.本发明提供一种手功能康复训练装置,主要包括:
9.摆臂,所述摆臂的一端设置有大拇指指套结构;
10.扇形齿轮传动组件,所述扇形齿轮传动组件包括第一扇形齿轮和与所述第 一扇形齿轮啮合的第二扇形齿轮;且所述第一扇形齿轮和所述第二扇形齿轮中 的一者与所述摆臂的另一端连接,另一者与一设有直槽口的限位块连接;
11.直线往复传动组件,所述直线往复传动组件包括能够沿直线往复滑动的滑 块,所述滑块上连接有与所述直槽口滑动配合的限位销;
12.动力系统,所述动力系统用于驱动所述滑块沿直线往复滑动。
13.可选的,还包括动力固定板,所述动力系统安装于所述动力固定板上。
14.可选的,所述动力系统包括:
15.动力传动组件,所述动力传动组件包括传动丝杠和丝杠滚轴固定座,所述 丝杠滚轴固定座的一端与所述传动丝杠螺纹连接,另一端与所述滑块固定连 接;
16.驱动系统,所述驱动系统与所述传动丝杠连接,以驱动所述传动丝杠转动。
17.可选的,所述驱动系统为电机或液压马达。
18.可选的,还包括直线导向滑轨,所述直线导向滑轨平行于所述传动丝杠, 所述滑块滑动安装于所述直线导向滑轨上。
19.可选的,所述丝杠滚轴固定座的一侧向外延伸形成有拐角结构,所述限位 销固定安装于所述拐角结构的端部。
20.可选的,还包括拇指结构固定座,所述拇指结构固定座固定安装于所述动 力固定板上;
21.所述第一扇形齿轮和所述第二扇形齿轮均转动安装于所述拇指结构固定 座上。
22.可选的,所述拇指结构固定座上穿设有第一齿轮固定螺柱和第二齿轮固定 螺柱,所述第一扇形齿轮和所述第二扇形齿轮分别通过轴承可转动安装于所述 第一齿轮固定螺柱和所述第二齿轮固定螺柱的顶部。
23.可选的,所述第一扇形齿轮的非啮合端与所述摆臂的另一端连接,所述第 二扇形齿轮的非啮合端与所述限位块连接。
24.可选的,所述限位销通过开口挡圈固定于所述拐角结构的端部。
25.本发明相对于现有技术取得了以下技术效果:
26.本发明提出的基于扇形齿轮传动机构的手功能康复训练装置,结构简单合 理,部件少,重量轻,采用扇形不完全齿轮组啮合传动,滑块限位的方式,利 用两啮合扇形齿轮的转速相同,但旋转方向相反的原理,以具有短、重复或往 复运动特征以及经过短弧而不是完整旋转的机构中自行驱动的机构,带动摆臂 进行往复运动。本发明巧妙得将滑块的直线运动转化成摆臂的往复旋转运动, 单平面运动转化为多维度运动,轻松实现拇指的被动弯曲,提高舒适感,在执 行操作上更顺滑、无卡滞现象。其运动方向轨迹模拟人体大拇指屈伸动作,用 于手功能康复训练大拇指部位中,康复训练效果好,有效解决了目前的训练方 式不符合人体工程学中大拇指抓握运动轨迹的问题,实用性强。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的 前提下,还可以根据这些附图获得其他的附图。
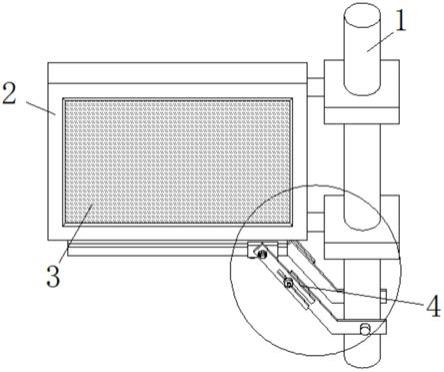
28.图1为本发明实施例所公开的手功能康复训练装置的主视图;
29.图2为本发明实施例所公开的手功能康复训练装置的仰视图;
30.图3为本发明实施例所公开的手功能康复训练装置的整体安装示意图。
31.其中,附图标记为:1、手功能康复训练装置;2、摆臂;3、第一扇形齿 轮;4、第二扇形齿轮;5、限位块;6、直槽口;7、滑块;8、限位销;9、动 力固定板;10、传动丝杠;11、丝杠滚轴固定座;12、驱动系统;13、直线导 向滑轨;14、拐角结构;15、拇指结构固定座;16、第一齿轮固定螺柱;17、 第二齿轮固定螺柱。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的之一是提供一种基于扇形齿轮传动机构的手功能康复训练 装置,以解决上述现有技术存在的结构复杂、零件过多导致重量较重,且训练 方式不符合人体工程学中大拇指抓握运动轨迹的问题。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和 具体实施方式对本发明作进一步详细的说明。
35.实施例一
36.如图1
‑
3所示,本实施例提供一种手功能康复训练装置1,主要包括摆臂 2、扇形齿轮传动组件、直线往复传动组件和动力系统。其中,摆臂2为l型 摆臂结构,其底部设置有大拇指指套结构;扇形齿轮传动组件包括第一扇形齿 轮3和与第一扇形齿轮3啮合的第二扇形齿轮4,且第一扇形齿轮3和第二扇 形齿轮4中的一者与摆臂2的顶部连接,另一者与一设有直槽口6的限位块5 连接;直线往复传动组件包括能够沿直线往复滑动的滑块7,滑块7上连接有 与直槽口6滑动配合的限位销8;动力系统用于驱动滑块7沿直线往复滑动。 上述结构中,第一扇形齿轮3的非啮合端与摆臂2的另一端连接,第二扇形 齿轮4的非啮合端与限位块5连接。
37.本实施例中,大拇指指套结构采用现有的指套结构形式,主要用于供拇指 勾持,以便顺利完成大拇指的康复训练。
38.本实施例中,如图1
‑
3所示,还包括动力固定板9,动力系统安装于动力 固定板9上。
39.本实施例中,如图1
‑
3所示,动力系统包括动力传动组件和驱动系统12, 动力传动组件包括传动丝杠10和丝杠滚轴固定座11,丝杠滚轴固定座11的 一端与传动丝杠10螺纹连接,另一端与滑块7固定连接;驱动系统12与传动 丝杠10连接,以驱动传动丝杠10转动。
40.本实施例中,如图1
‑
3所示,驱动系统12为电机或液压马达。
41.本实施例中,如图1
‑
3所示,还包括直线导向滑轨13,直线导向滑轨13 平行于传动丝杠10,滑块7滑动安装于直线导向滑轨13上。
42.本实施例中,如图1
‑
3所示,丝杠滚轴固定座11的一侧向外延伸形成有 拐角结构14,限位销8固定安装于拐角结构14的自由端(即远离传动丝杠10 的一端)。如图3所示,拐角结构14优选为直角结构,拐角结构14的自由端 上表面安装限位销8,下表面可选择性安装导向机构,该导向机构可以是滑槽 滑块组件,如图3所示,滑槽开设于动力固定板9的上
表面,而与滑槽匹配的 滑块可固定安装于拐角结构14的自由端下表面。该导向机构的设置有利于提 升拐角结构14的滑动稳定性,进一步提升由限位销8和滑块7组成的限位组 件的平滑性和稳定性。
43.本实施例中,如图1
‑
3所示,还包括拇指结构固定座15,拇指结构固定座 15固定安装于动力固定板9上;第一扇形齿轮3和第二扇形齿轮4均转动安 装于拇指结构固定座15上。
44.本实施例中,如图1
‑
3所示,拇指结构固定座15上穿设有第一齿轮固定 螺柱16和第二齿轮固定螺柱17,第一扇形齿轮3和第二扇形齿轮4分别通过 轴承可转动安装于第一齿轮固定螺柱16和第二齿轮固定螺柱17的顶部。
45.本实施例中,优选限位销8通过开口挡圈固定于拐角结构14的自由端上 表面。
46.本实施例中,第一扇形齿轮3为平齿轮,其仅在其圆周的一小部分具有齿。 通过轴承、第一齿轮固定螺柱16、螺钉固定在拇指结构固定座15上,与第二 扇形齿轮4相啮合,并通过第二扇形齿轮4带动其进行往复运动。
47.本实施例中,第二扇形齿轮4为平齿轮,其仅在其圆周的一小部分具有齿。 通过轴承、第二齿轮固定螺柱17、螺钉固定在限位块5上,与第一扇形齿轮3 相啮合。限位块5通过第二齿轮固定螺柱17、相应的轴承、螺钉固定在第二 扇形齿轮4上,其直槽口与限位销8配合形成拇指结构限位组件,并由限位销 8带动其进行往复运动。
48.本实施例中,摆臂2可通过螺钉固定在第一扇形齿轮3上,摆臂2的顶端 设置有通孔以镶入轴承,可随第一扇形齿轮3绕第一齿轮固定螺柱16转动。 摆臂2的顶端与其l型的下摆部分优选呈80
°
~110
°
的夹角设置,最优方式 是摆臂2的顶板(与第一扇形齿轮3连接的板件)与其下摆部分(下摆部分优 选为l型,供拇指放置)之间呈90度夹角设置,如图1~2所示。
49.本实施例中,滑块7优选为滚珠滑块,标准件。通过螺钉固定在丝杠滚轴 固定座11上。丝杠滚轴固定座11一端连接限位销8,另一端连接传动丝杠10 与滑块7。根据传动丝杠10正反转动带动限位销8,进而带动齿轮组往复运动。
50.本实施例中,第一扇形齿轮3、第二扇形齿轮4采用的轴承均优选为深沟 球轴承,套在对应的齿轮固定螺柱上,连接扇形齿轮转动。
51.本实施例中,动力固定板9的作用使承载整个用于手功能康复训练的动力 系统,并通过螺钉使扇形齿轮传动组件、直线往复传动组件和动力系统均固定 在自身上。动力系统连接传动丝杠为系统提供动力,通过正反驱动传动丝杠实 现丝杠滚轴固定座的往复运动。
52.本实施例提出的基于扇形齿轮传动机构的手功能康复训练装置,结构简单 合理,部件少,重量轻,采用扇形不完全齿轮组啮合传动,滑块限位的方式, 利用两啮合扇形齿轮的转速相同,但旋转方向相反的原理,以具有短、重复或 往复运动特征以及经过短弧而不是完整旋转的机构中自行驱动的机构,带动摆 臂进行往复运动。本发明巧妙得将滑块的直线运动转化成摆臂的往复旋转运 动,单平面运动转化为多维度运动,轻松实现拇指的被动弯曲,提高舒适感, 在执行操作上更顺滑、无卡滞现象。其运动方向轨迹模拟人体大拇指屈伸动作, 用于手功能康复训练大拇指部位中,康复训练效果好,有效解决了目前的训练 方式不符合人体工程学中大拇指抓握运动轨迹的问题,实用性强。
53.需要说明的是,对于本领域技术人员而言,显然本发明不限于上述示范性 实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他 的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范 性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定, 因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发 明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
54.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实 施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域 的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改 变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。