1.本发明涉及根据权利要求1的前序部分的设施、根据权利要求8的前序部分的方法、根据权利要求9的数据处理设备和根据权利要求10的计算机程序。
背景技术:
2.为了在农业用地上作业,不同的农业的商用车辆通常必须以保持不变的间距并排或前后行驶。例如,带有相应的挂车的拖拉机必须在联合收割机旁行驶,以便收集其排出物。
3.文献de 10 2016 216 251 a1、de 10 2017 209 591 a1和de 102005 019 269b4公开了配备有雷达反射器的道路车辆。雷达反射器用于确定车辆的尺寸和类型。
4.文献us 6 120 154 a1也涉及已知的具有雷达反射器的道路车辆。公开了一种根据前方行驶的车辆的雷达反射器的反射来确定其与后方行驶的车辆的间距的方法。
5.从现有技术还已知了基于雷达的自适应巡航控制。其基于雷达来获知与前方行驶的车辆的间距,以便控制尾随的车辆的速度。对于车道保持而言,尾随的车辆遵循行车道标记或其他的视觉上可识别的行车道边界。
6.由现有技术已知的解决方案不能在农业中使用,这是因为在农业用地上不存在行车道。
技术实现要素:
7.本发明的任务是,改进车队在非铺设道路上的自主控制。该任务通过根据权利要求1的设施、根据权利要求8的方法、根据权利要求9的数据处理设备和根据权利要求10的计算机程序来解决。优选的改进方案包含在从属权利要求中,并且由以下描述以及在附图中示出的实施例得到。
8.根据本发明的设施包括数据处理设备和第二车辆。数据处理设备优选是第二车辆的一部分。替选地,数据处理设备可以布置在第二车辆之外,并且通过优选无线的连接与第二车辆连接以用于数据传输。
9.第二车辆具有至少有一个雷达传感器。这是被构造成用于接收雷达辐射并将其转换为信号的传感器。
10.优选地,第二车辆还具有雷达发送器。这是用于发出雷达辐射的装置。雷达传感器优选被构造成用于接收由雷达发送器发出并由对象反射的雷达辐射。
11.在第一车辆上安置有至少一个雷达反射器。这是用于反射雷达辐射的装置。雷达反射器被构造成用于,反射由雷达发送器发出的雷达辐射。
12.从现有技术已知了合适的雷达反射器。优选使用安置在第一车辆上的一个或多个角反射器。
13.数据处理设备被构造成用于在至少一个雷达传感器的信号中识别安置在第一车辆上的至少一个雷达反射器或其反射。这详细地意味着,数据处理设备被构造成用于将信
号的来自于至少一个雷达反射器的反射的部分与信号的其他部分隔离。从现有技术中已知针对于此的合适的方法。
14.根据本发明,数据处理设备被构造成用于借助信号定位至少一个雷达反射器。这意味着,数据处理设备使用至少一个雷达反射器的信号来确定至少一个雷达反射器的位置。位置固定的或关于第二车辆固定的参考系统用作参考系统。该位置可以在参考系统中通过限定三个位置坐标来确定。如果车辆行驶的地面是平坦的,则三个坐标中的一个坐标就已经通过地面所限定。在该情况下,本发明受限于对剩余的两个位置坐标的确定。
15.本发明适用于非铺设道路的定位。相应地,第一车辆和第二车辆可以是农业机械或建筑机械。
16.在优选的改进方案中,至少两个雷达反射器安置在第一车辆上。数据处理设备被相应地改进成借助信号来定位至少两个雷达反射器。至少两个雷达反射器是有利的,这是因为可以评估它们的间距。这简化了定位。
17.在进一步优选的改进方案中,数据处理设备被构造成用于定位第一车辆。对第一车辆的定位,即对其位置或位置坐标的确定直接从对雷达反射器的定位得到。
18.在优选的改进方案中,除了对位置的确定之外,还借助至少一个雷达传感器的信号至少部分地通过数据处理设备确定至少一个雷达反射器的方位。至少一个雷达反射器的方位表示其在空间中的角位置或定向。方位优选在至少一个雷达反射器也被定位在其中的同一参考系统中被确定。
19.至少一个雷达反射器的方位通过三个角度来限定。其中两个角度由第一车辆和第二车辆所行驶的地面确定。如果地面是平坦的,则两个角度是恒定的,从而根据改进方案确定至少一个雷达反射器的单个方位角度就足够。
20.优选地,数据处理设备被改进成至少部分地确定第一车辆的方位。第一车辆的方位直接由至少一个雷达反射器的方位得到。
21.如果第二车辆应该跟随第一车辆,则单个定位以及必要时确定至少一个雷达反射器的方位是不够的。在该情况下,根据改进方案反复地借助至少一个雷达传感器的信号来定位至少一个雷达反射器。必要时,也借助信号反复地确定至少一个雷达反射器的方位。
22.反复定位或确定意味着在第一时间点进行定位或确定并且在第二时间点进行重新定位或确定。在第一时间点和第二时间点,由至少一个雷达反射器反射的雷达辐射相应地被至少一个雷达传感器接收并且转换成信号。该信号相应地由数据处理设备评估,用以定位和必要时用以方位确定。
23.优选地,此外连续(即以不间断的顺序)进行定位和必要时的方位确定。
24.在优选的改进方案中,反复定位和必要时反复方位确定能够使数据处理设备确定至少一个雷达反射器的轨迹。轨迹是对象沿其运动的空间曲线。
25.从至少一个雷达反射器的轨迹直接得到第一车辆的轨迹。在优选的改进方案中,该轨迹通过数据处理设备确定。
26.借助至少一个雷达反射器的或第一车辆的轨迹,可以控制第二车辆,从而使得第二车辆以保持不变的间距跟随第一车辆。数据处理设备被相应地改进成沿至少一个雷达反射器的或第一车辆的轨迹控制第二车辆。这意味着,第二车辆由数据处理设备控制,使得其轨迹平行于至少一个雷达反射器的轨迹或第一车辆的轨迹地延伸。尤其地,可以控制第二
车辆,使得至少一个雷达反射器的轨迹或第一车辆的轨迹与第二车辆的轨迹一致。第二车辆于是精确地跟随第一车辆。
27.由根据本发明的设施的数据处理设备执行的上述的方法是根据本发明的方法。根据本发明的数据处理设备被调整用于执行该方法。例如,当根据本发明的计算机程序包含在数据处理设备的数据载体上时,是这种情况。根据本发明的计算机程序又被构造成用于促使数据处理设备执行根据本发明的方法。
附图说明
28.在附图中示出了本发明的优选的实施例。一致的附图标记在此表示相同或功能相同的特征。详细地:
29.图1示出了两个前后行驶的车辆;并且
30.图2示出了两个并排行驶的车辆。
具体实施方式
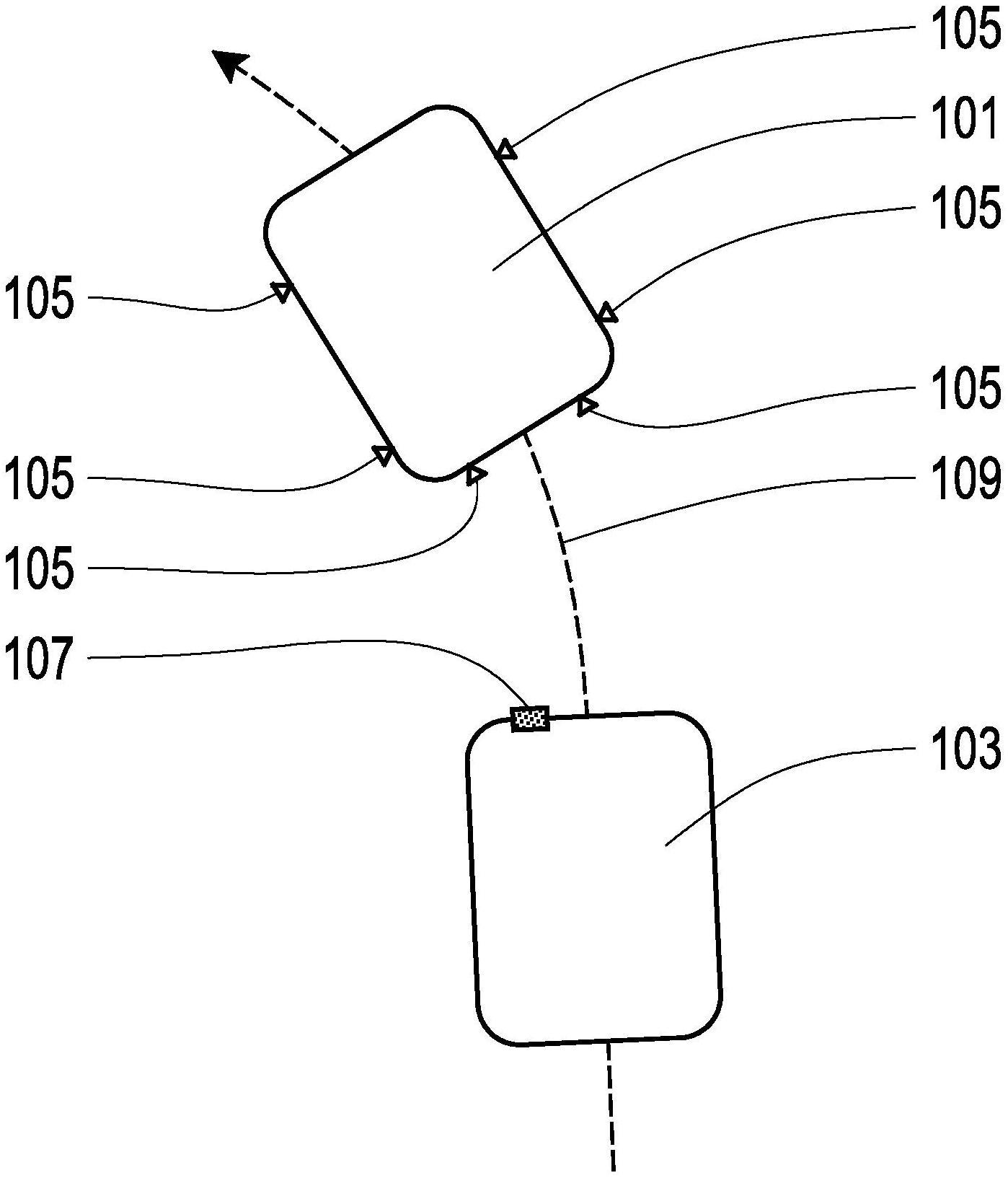
31.图1中示出了第一车辆101和第二车辆103。第一车辆101配备有角反射器105。角反射器105成对地布置在第一车辆101的侧部和尾部。
32.第二车辆103具有雷达单元107。雷达单元包含发送器和接收器。由发送器发出的雷达射束由角反射器105反射并且由接收器检测。由此,第二车辆103能够精确定位第一车辆105并且以保持不变的间距跟随第一车辆。第一车辆105和第二车辆103在此沿一致的轨迹109运动。
33.根据图1,雷达单元107安置在第二车辆103的前部。图2示出了雷达单元107替选地安置在第二车辆103的侧部上。这能够使第二车辆103沿与第一车辆的轨迹109平行延伸的轨迹201行驶。第二车辆103在此以保持不变的间距在第一车辆101旁行驶。
34.附图标记列表
35.101第一车辆
36.103第二车辆
37.105角反射器
38.107雷达单元
39.109轨迹
40.201轨迹
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。