技术特征:
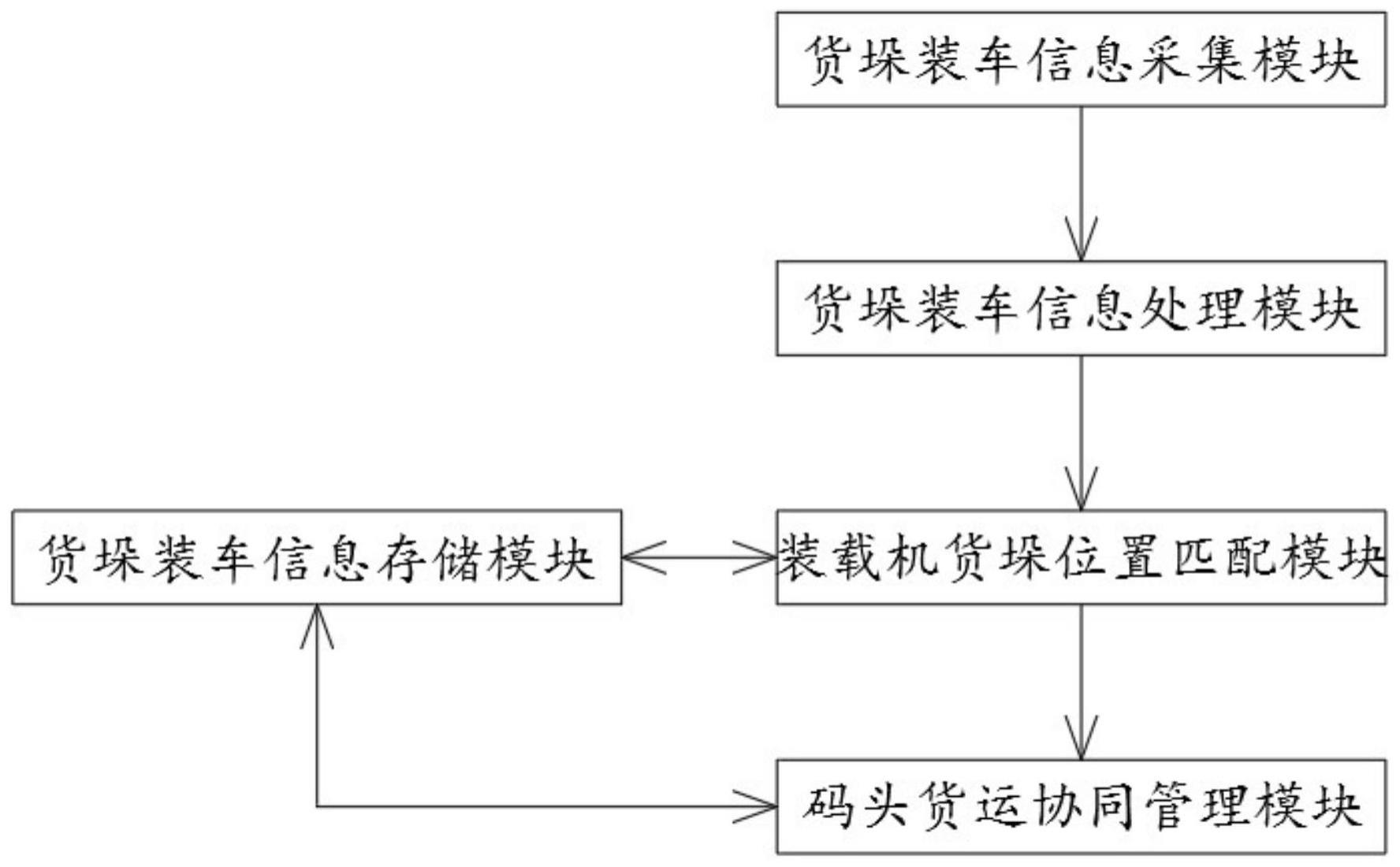
1.基于gis和gps的码头货运协同管理系统,其特征在于,包括货垛装车信息采集模块,用于实时采集货垛装车指令信息,装载机配置智能终端,码头调度员通过码头货运协同管理系统向装载机智能终端下发货垛装车指令信息;货垛装车信息处理模块,用于对实时采集的货垛装车指令信息进行预处理,获取货垛装车指令信息,基于码头货运协同管理需求,完全提取出货垛装车指令信息,且对货垛装车指令信息进行检索、排序及计算,确定出货垛装车指定位置信息;装载机货垛位置匹配模块,用于对装载机货垛位置进行匹配,实时获取装载机gps位置,基于gis地图上货垛装车指定位置信息,对装载机gps位置进行位置匹配,确定出装载机货垛位置匹配报告;码头货运协同管理模块,用于对码头货运进行协同管理,获取装载机货垛位置匹配报告,基于数据挖掘技术,对装载机货垛位置匹配报告进行相关性分析,确定出码头货运协同管理策略,按照码头货运协同管理策略对码头货运进行协同管理;货垛装车信息存储模块,用于存储货垛装车信息及与货垛作业相匹配的合法汽车信息,为码头货运协同管理提供参照指引依据。2.根据权利要求1所述的基于gis和gps的码头货运协同管理系统,其特征在于:货垛装车信息采集模块,包括:触发请求获取模块,用于码头货运协同管理系统实时监测是否获得发送下发货垛装车指令信息的触发请求;信道评估模块,用于当所述货运协同管理系统获取下发货垛装车指令信息的触发请求时,扫描所述码头货运协同管理系统与所述装载机智能终端之间的通信信道,并获得每个通信信道的质量评价参数,其中,所述质量评价参数通过如下公式获取:通信信道的质量评价参数,其中,所述质量评价参数通过如下公式获取:其中,p表示每个通信信道各自对应的质量评价参数;p0表示预设的基准参数数值;n表示通信信道对应的完成通信的次数;t
si
表示第i次完成通信所对应的通信延时时长;t
s0
表示通信所对应的理论通信延时;t
sy
表示当前指令通信中允许的最大通信延时;s表示提货车辆进港后到达装货点的行驶距离;v
max
表示提货车辆在港内允许行驶的最大速度值;参数比较模块,用于将所述质量评价参数与预设的参数阈值进行比较,获得指令通信策略,并按照所述指令通信策略选择对应通信信道,作为目标信道;通信模块,用于通过所述目标信道,所述码头货运协同管理系统向装载机智能终端下发货垛装车指令信息。3.根据权利要求2所述的基于gis和gps的码头货运协同管理系统,其特征在于:所述指令通信策略如下:将多个所述通信信道对应的质量评价参数分别与预设的参数阈值进行比较,获得所述质量评价参数超过所述参数阈值的通信信道;
当所述质量评价参数超过所述参数阈值的通信信道个数不唯一时,则选择所述质量评价参数最高的通信信道作为目标信道;当所有通信信道的对应质量评价参数均未超过所述参数阈值时,提取所述质量评价参数最大值对应的通信信道作为目标信道进行指令通信传输,并设置通信时长;其中,所述通信时长通过如下公式获取:其中,t表示通信时长;s表示提货车辆进港后到达装货点的行驶距离;v
max
表示提货车辆在港内允许行驶的最大速度值;α表示调整因子,取值范围为1.22-1.41;t
s0
表示通信所对应的理论通信延时;实时监测所述货垛装车指令信息在所述通信时长下是否发送至智能终端,如果所述货垛装车指令信息在所述通信时长下没有发送至智能终端,则通过所述码头货运协同管理系统进行信息未送达提醒,用于提醒码头调度员。4.根据权利要求1所述的基于gis和gps的码头货运协同管理系统,其特征在于:所述货垛装车信息处理模块包括货垛装车信息提取单元,用于对实时采集的货垛装车指令信息进行提取,基于码头货运协同管理需求,从实时采集的货垛装车指令信息中完全提取出货垛装车指令信息;货垛装车信息检索单元,用于对提取的货垛装车指令信息进行检索,基于顺序检索方法,对完全提取出来的货垛装车指令信息进行检索,过滤掉对码头货运协同管理无价值的货垛装车指令信息,确定出对码头货运协同管理有价值的货垛装车指令信息;货垛装车信息排序单元,用于对检索的货垛装车指令信息进行排序,基于内部排序方法,对确定出来的对码头货运协同管理有价值的货垛装车指令信息进行有效的排序,确定出具有分布特征的货垛装车指令信息;货垛装车信息计算单元,用于对排序的货垛装车指令信息进行计算,基于算术及逻辑运算,对具有分布特征的货垛装车指令信息进行计算,确定出货垛装车指定位置信息。5.根据权利要求2所述的基于gis和gps的码头货运协同管理系统,其特征在于:所述装载机货垛位置匹配模块包括装载机gps位置获取单元,用于实时获取装载机gps位置;装载机货垛位置匹配单元,用于对装载机货垛位置进行匹配,基于实时获取的装载机gps位置,根据gis地图上货垛装车指定位置信息,对装载机gps位置进行位置匹配,位置匹配成功后,自动加载到该货垛作业的合法汽车信息,其合法汽车信息包括车牌号及装车数量,直接选择车辆后进行装车作业。6.根据权利要求3所述的基于gis和gps的码头货运协同管理系统,其特征在于:所述码头货运协同管理模块包括货垛电子围栏生成单元,用于对gis地图上的每个货垛自动生成电子围栏,为货垛作业提供监测管控依据;监测管控异常报警单元,用于对电子围栏内的装载机及提货汽车进行监测管控及异常报警,根据装载机及提货汽车的实时gps位置,判断装载机及提货汽车是否进入电子围栏,当发现装载机及提货汽车进入非生产指令指定作业货垛时,码头货运协同管理系统进行异
常报警,且反馈给生产管理人员;码头货运协同管理单元,用于对码头货运进行协同管理。7.根据权利要求4所述的基于gis和gps的码头货运协同管理系统,其特征在于:所述货垛装车信息存储模块包括货垛装车信息存储单元,用于存储gis地图上的每个货垛装车信息;合法汽车信息存储单元,用于存储与gis地图上的每个货垛装车信息相匹配的合法汽车信息,其合法汽车信息包括车牌号及装车数量。8.基于gis和gps的码头货运协同管理方法,基于如权利要求5所述的基于gis和gps的码头货运协同管理系统实现,其特征在于,包括如下步骤:s1:提货车辆申报进港后,先过空磅,到达作业场地后,码头调度员通过码头货运协同管理系统向装载机智能终端下发货垛装车指令信息;s2:装载机智能终端接收到货垛装车指令信息后,装载机司机根据货垛装车指令信息到达指定货垛,车载系统实时获取装载机gps位置,发现装载机gps位置与gis地图上该货垛位置匹配后,码头货运协同管理系统自动加载到该货垛作业的合法汽车信息,直接选择车辆后进行装车作业。s3:作业过程中,码头货运协同管理系统将gis地图中每个货垛自动生成电子围栏,根据装载机、提货汽车的实时gps位置,判断装载机及提货汽车是否进入电子围栏,当发现装载机及提货汽车进入非生产指令指定作业货垛时,码头货运协同管理系统进行异常报警,反馈给生产管理人员。9.根据权利要求6所述的基于gis和gps的码头货运协同管理方法,其特征在于:基于实时获取的装载机gps位置,根据gis地图上货垛装车指定位置信息,对装载机gps位置进行位置匹配,执行以下操作:实时获取装载机gps位置;基于实时获取的装载机gps位置,根据gis地图上货垛装车指定位置信息,对装载机gps位置进行位置匹配;针对实时获取装载机gps位置与gis地图上货垛装车指定位置匹配的情况,则码头货运协同管理系统自动加载到该货垛作业的合法汽车信息,直接选择车辆后进行装车作业;针对实时获取装载机gps位置与gis地图上货垛装车指定位置不匹配的情况,则码头货运协同管理系统向装载机智能终端下发向gis地图上货垛装车指定位置行走的指令信息。10.根据权利要求7所述的基于gis和gps的码头货运协同管理方法,其特征在于:根据装载机、提货汽车的实时gps位置,判断装载机及提货汽车是否进入电子围栏,执行以下操作:获取gis地图中每个货垛电子围栏位置信息;获取装载机、提货汽车的实时gps位置;针对装载机、提货汽车的实时gps位置与货垛电子围栏位置信息一致的情况,则装载机及提货汽车进入生产指令指定作业货垛;针对装载机、提货汽车的实时gps位置与货垛电子围栏位置信息不一致的情况,则装载机及提货汽车进入非生产指令指定作业货垛时,码头货运协同管理系统进行异常报警,反馈给生产管理人员。
技术总结
本发明公开了基于GIS和GPS的码头货运协同管理系统及其管理方法,属于码头货运技术领域,包括货垛装车信息采集模块,用于实时采集货垛装车指令信息;货垛装车信息处理模块,用于对实时采集的货垛装车指令信息进行预处理;装载机货垛位置匹配模块,用于对装载机货垛位置进行匹配;码头货运协同管理模块,用于对码头货运进行协同管理。本发明解决了现有提货司机需要等待理货员确认提货车辆合法性,其增加了提货时间及提货成本,且提货效率低下的问题,本发明减少了提货司机等待理货员确认的时间,明显降低成本,提高效率,且码头货运协同管理系统可进行异常报警,反馈给生产管理人员,从而提高了货运安全,降低了货物偷盗的风险。降低了货物偷盗的风险。降低了货物偷盗的风险。
技术研发人员:王兴好 金帅 吴占辉 李秀鹏 徐远东 赵超 肖杰 孔凡林 董治中
受保护的技术使用者:连云港电子口岸信息发展有限公司
技术研发日:2023.07.03
技术公布日:2023/10/7
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。