技术特征:
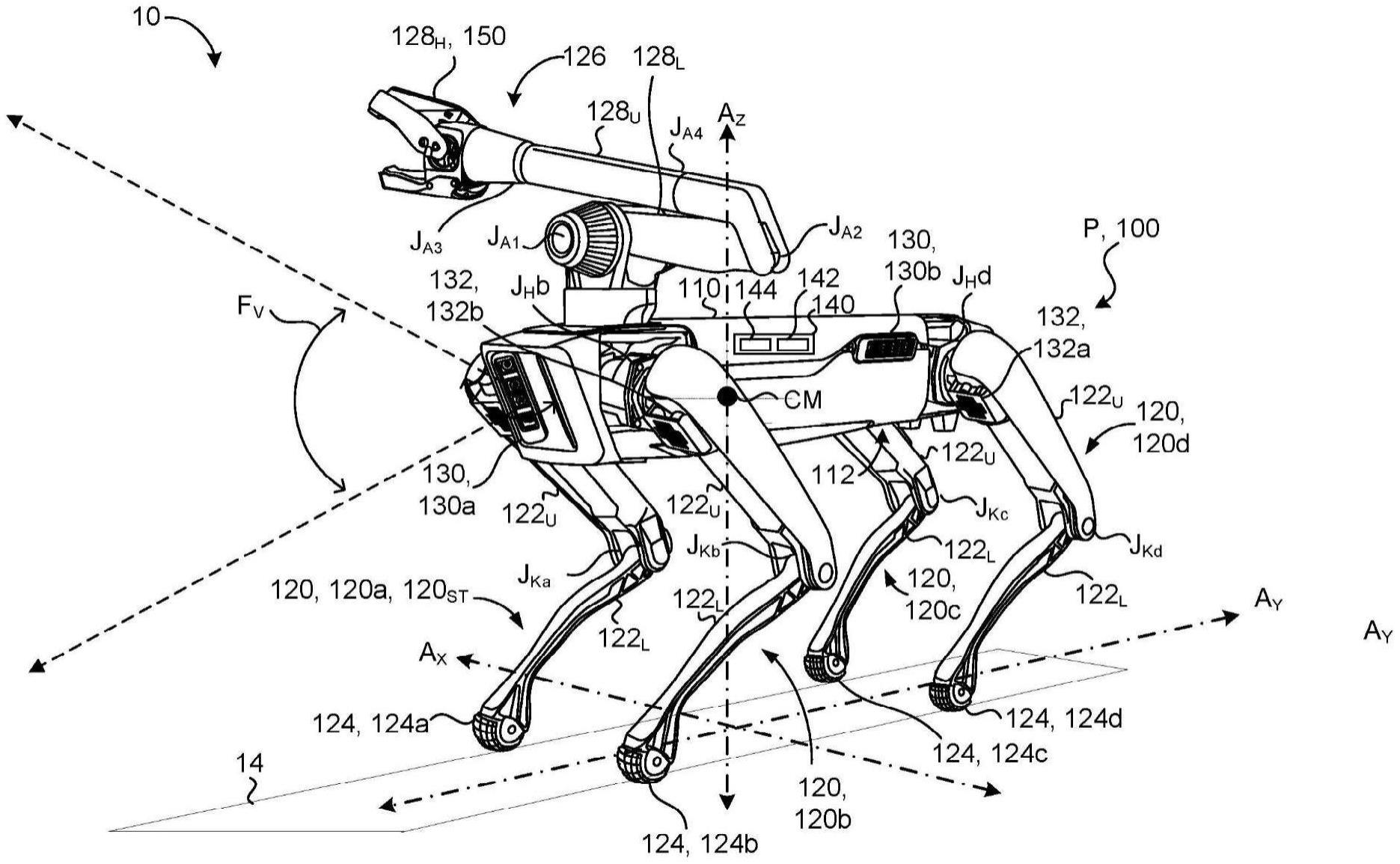
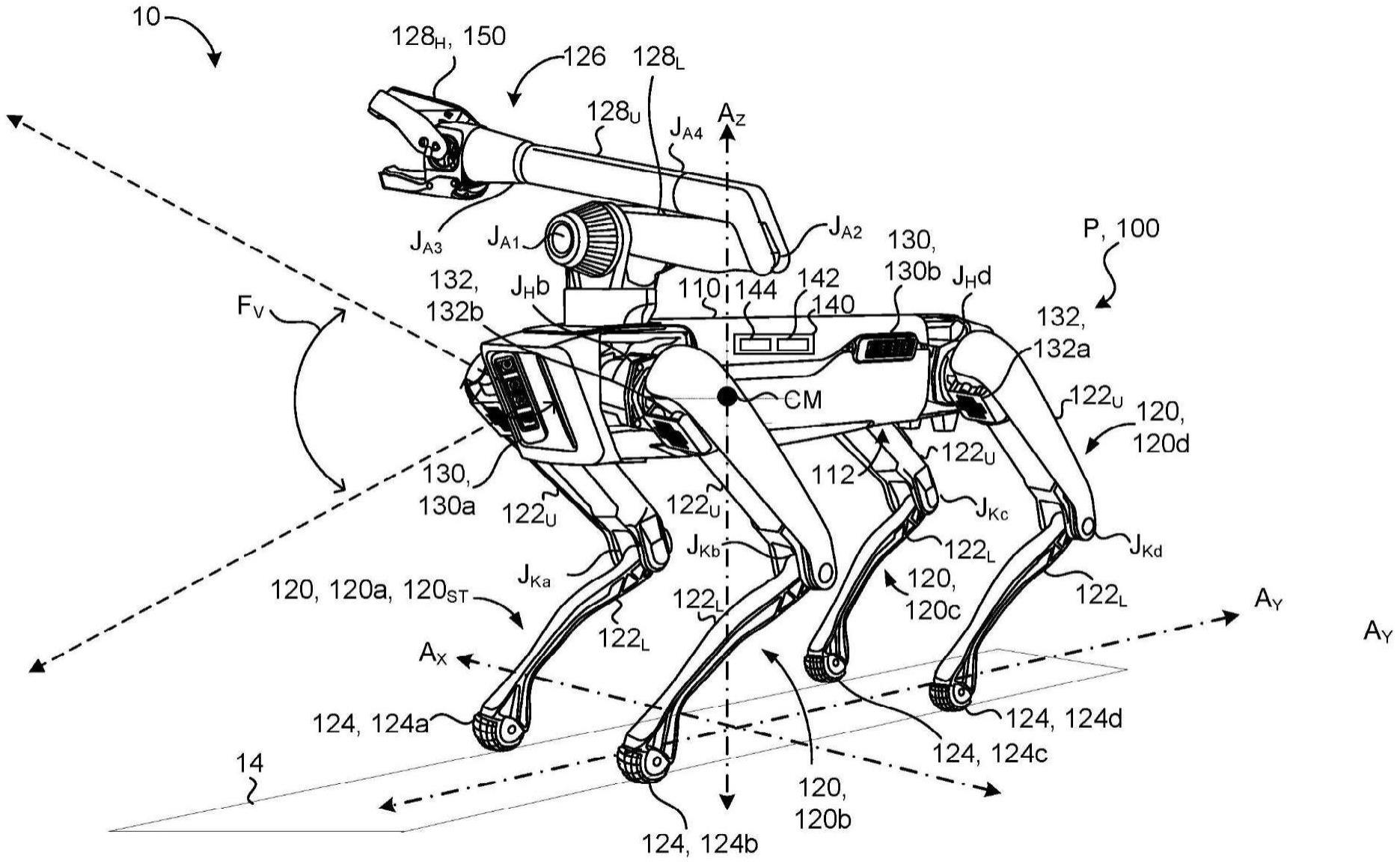
1.一种计算机实现的方法(300),当由腿式机器人(100)的数据处理硬件(142)执行时,使所述数据处理硬件(142)执行操作,所述操作包括:接收与包括对接站(20)的至少一部分的区域相对应的传感器数据(134);基于所述腿式机器人(100)相对于所述对接站(20)的初始姿势(p)来确定所述对接站(20)的估计姿势(pe);从所接收的传感器数据(134)识别与包括所述对接站(20)的至少一部分的所述区域相对应的一个或多个对接站特征(22);将所述一个或多个识别的对接站特征(22)与一个或多个已知的对接站特征(22)进行匹配;以及基于与所述一个或多个已知的对接站特征(22)匹配的所述一个或多个识别的对接站特征(22)的取向,将所述对接站(20)的所述估计姿势(pe)调整为所述对接站(20)的校正姿势(pc)。2.根据权利要求1所述的方法(300),其中,所述操作还包括指示所述腿式机器人(100)使用所述对接站(20)的所述校正姿势(pc)对接在所述对接站(20)处。3.根据权利要求1或权利要求2所述的方法(300),其中,所述操作还包括使用所述对接站(20)的所述校正姿势(pc)来生成对接站地图(202),所述对接站地图(202)包括关于所述对接站(20)的地形信息。4.根据权利要求3所述的方法(300),其中,所述对接站地图(202)包括与所述腿式机器人(100)应当避免触地所述腿式机器人(100)的腿(120)的相应脚(124)的区域相对应的一个或多个区域,所述一个或多个区域位于包括所述对接站(20)的至少一部分的区域中。5.根据权利要求3或权利要求4所述的方法(300),其中,所述对接站地图(202)包括与所述腿式机器人(100)应当避免移动所述腿式机器人(100)的主体(110)的区域相对应的一个或多个区域,所述一个或多个区域位于包括所述对接站(20)的至少一部分的区域中。6.根据权利要求3-5中任一项所述的方法(300),其中,所述对接站地图(202)包括指示识别的对接站特征(22)的高度的一个或多个区域,所述一个或多个区域位于包括所述对接站(20)的至少一部分的区域中。7.根据权利要求3-6中任一项所述的方法(300),其中,所述对接站地图(202)包括所述对接站(20)的状态指示符(402),所述状态指示符(402)基于所述一个或多个识别的对接站特征(22)与所述一个或多个已知的对接站特征(22)的匹配,并且所述状态指示符(402)识别所述对接站(20)的可用性。8.根据权利要求1-7中任一项所述的方法(300),其中,所述对接站(20)包括与用于对所述腿式机器人(100)的电池充电的接触端子(22t)相关联的相应对接站特征(22)。9.根据权利要求1-8中任一项所述的方法(300),其中,所述对接站(20)包括对应于对准塔(22a)的相应对接站特征(22),所述对准塔(22a)被配置为当所述腿式机器人(100)处于在所述对接站(20)处对所述腿式机器人(100)的电池充电的充电姿势时支撑所述腿式机器人(100)的至少一部分。10.根据权利要求1-9中任一项所述的方法(300),其中,所述操作还包括通过以下方式识别所述腿式机器人(100)相对于所述对接站(20)的所述初始姿势(p):检测与所述对接站(20)相关联的基准(26),所述基准(26)被配置为对与所述腿式机器
人(100)相关联的电池充电;以及基于检测到的基准(26)确定所述腿式机器人(100)相对于所述对接站(20)的初始对接姿势。11.根据权利要求1-10中任一项所述的方法(300),其中,所述腿式机器人(100)是四足机器人。12.一种电池供电机器人(100),包括:主体(110);一个或多个腿(120),所述一个或多个腿(120)耦接到所述主体(110);数据处理硬件(142);以及与所述数据处理硬件(142)通信的存储器硬件(144、164),所述存储器硬件(144、164)存储指令,所述指令当在所述数据处理硬件(142)上执行时使所述数据处理硬件(142)执行操作,所述操作包括:接收与包括对接站(20)的至少一部分的区域相对应的传感器数据(134);基于所述电池供电机器人(100)相对于所述对接站(20)的初始姿势(p)来确定所述对接站(20)的估计姿势(pe);从所接收的传感器数据(134)识别与包括所述对接站(20)的至少一部分的所述区域相对应的一个或多个对接站特征(22);将所述一个或多个识别的对接站特征(22)与一个或多个已知的对接站特征(22)进行匹配;以及基于与所述一个或多个已知的对接站特征(22)匹配的所述一个或多个识别的对接站特征(22)的取向,将所述对接站(20)的所述估计的姿势(pe)调整为所述对接站(20)的校正姿势(pc)。13.根据权利要求12所述的电池供电机器人(100),其中所述操作还包括指示所述电池供电机器人(100)使用所述对接站(20)的所述校正姿势(pc)对接在所述对接站(20)处。14.根据权利要求12或权利要求13所述的电池供电机器人(100),其中,所述操作还包括使用所述对接站(20)的校正姿势(pc)来生成对接站地图(202),所述对接站地图(202)包括关于所述对接站(20)的地形信息。15.根据权利要求14所述的电池供电机器人(100),其中所述对接站地图(202)包括与所述电池供电机器人(100)应当避免触地所述电池供电机器人(100)的所述一个或多个腿(120)的相应脚(124)的区域相对应的一个或多个区域,所述一个或多个区域位于包括所述对接站(20)的至少一部分的区域中。16.根据权利要求14或15所述的电池供电机器人(100),其中所述对接站地图(202)包括与所述电池供电机器人(100)应当避免移动所述电池供电机器人(100)的所述主体(110)的区域相对应的一个或多个区域,所述一个或多个区域位于包括所述对接站(20)的至少一部分的区域中。17.根据权利要求14-16中任一项所述的电池供电机器人(100),其中所述对接站地图(202)包括指示识别的对接站特征(22)的高度的一个或多个区域,所述一个或多个区域位于包括所述对接站(20)的至少一部分的区域中。18.根据权利要求14-17中任一项所述的电池供电机器人(100),其中所述对接站地图
(202)包括用于所述对接站(20)的状态指示符(402),所述状态指示符(402)基于所述一个或多个识别的对接站特征(22)与所述一个或多个已知的对接站特征(22)的匹配,并且所述状态指示符(402)识别所述对接站(20)的可用性。19.根据权利要求12-18中任一项所述的电池供电机器人(100),其中所述对接站(20)包括与用于对所述电池供电机器人(100)的电池充电的接触端子(22t)相关联的相应对接站特征(22)。20.根据权利要求12-19中任一项所述的电池供电机器人(100),其中所述对接站(20)包括对应于对准塔(22a)的相应对接站特征(22),所述对准塔(22a)被配置为当所述电池供电机器人(100)处于在所述对接站(20)处对所述电池供电机器人(100)的电池充电的充电姿势时支撑所述电池供电机器人(100)的至少一部分。21.根据权利要求12-20中任一项所述的电池供电机器人(100),其中所述操作还包括通过以下方式识别所述电池供电机器人(100)相对于所述对接站(20)的所述初始姿势(p):检测与所述对接站(20)相关联的基准(26),所述基准(26)被配置为对与所述电池供电机器人(100)相关联的电池充电;以及基于检测到的基准(26)确定所述电池供电机器人(100)相对于所述对接站(20)的初始对接姿势。22.根据权利要求12-21中任一项所述的电池供电机器人(100),其中,所述电池供电机器人(100)是四足机器人。
技术总结
一种计算机实现的方法,当由腿式机器人(100)的数据处理硬件(142)执行时,使得数据处理硬件执行操作,所述操作包括接收与包括对接站(20)的至少一部分的区域相对应的传感器数据(134)。操作包括基于腿式机器人相对于对接站的初始姿势(P)来确定对接站的估计姿势(Pe)。所述操作包括从所接收的传感器数据识别一个或多个对接站特征(22)。操作包括将一个或多个所识别的对接站特征与一个或多个已知的对接站特征进行匹配。所述操作包括:基于与所述一个或多个已知的对接站特征匹配的所述一个或多个识别的对接站特征的取向,将所述对接站的所述估计的姿势调整为所述对接站的校正姿势。姿势。姿势。
技术研发人员:D
受保护的技术使用者:波士顿动力公司
技术研发日:2021.12.17
技术公布日:2023/9/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。