技术特征:
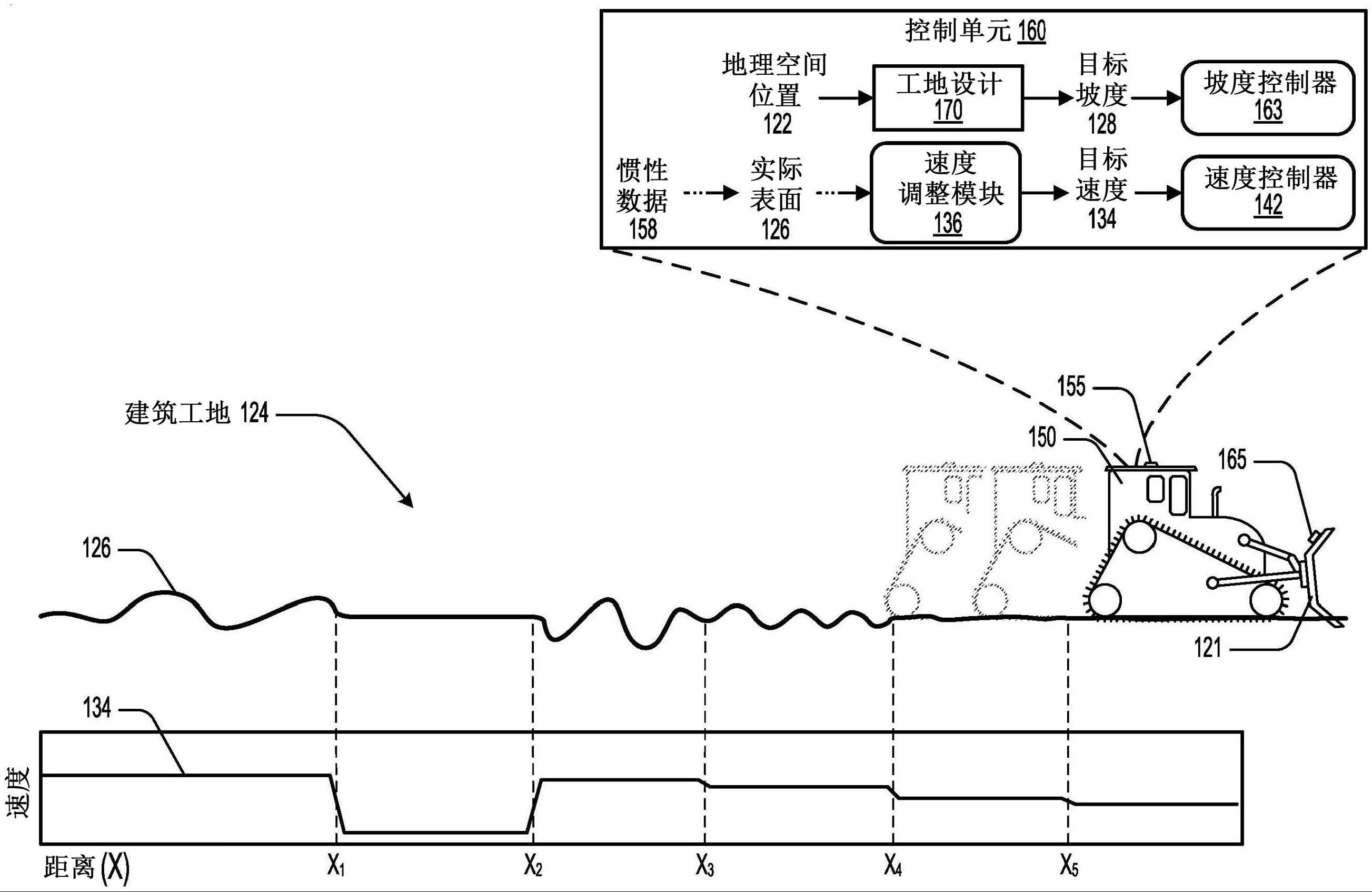
1.一种控制在建筑工地内操作的建筑机械的速度的计算机实施的方法,所述方法包括:在所述建筑机械以所述速度向前或向后方向移动的同时,使用所述建筑机械的一个或多个传感器捕获传感器数据;基于使用所述一个或多个传感器捕获的所述传感器数据来估计所述建筑工地的实际表面;计算目标表面和所述实际表面之间的偏差;基于所述偏差计算实际性能度量;比较所述实际性能度量与目标性能度量以确定速度调整,其中,确定所述速度调整以便减小所述实际性能度量与所述目标性能度量之间的误差;并且通过所述速度调整来调整所述建筑机械的所述速度。2.根据权利要求1所述的计算机实施的方法,其中,所述偏差包括所述目标表面与所述实际表面之间的多个距离。3.根据权利要求1所述的计算机实施的方法,其中,通过所述速度调整来调整所述建筑机械的所述速度包括:将所述速度调整提供给所述建筑机械的速度控制器。4.根据权利要求1所述的计算机实施的方法,其中,所述一个或多个传感器包括安装到所述建筑机械的工具上的惯性传感器。5.根据权利要求4所述的计算机实施的方法,其中,所述惯性传感器被配置为在所述建筑机械移动的同时检测所述工具的垂直移动。6.根据权利要求1所述的计算机实施的方法,其中,比较所述实际性能度量与所述目标性能度量以确定所述速度调整包括:计算所述实际性能度量与所述目标性能度量之间的所述误差;并且基于所述误差来确定所述速度调整。7.根据权利要求1所述的计算机实施的方法,其中,所述实际性能度量是所述偏差的递增函数。8.根据权利要求7所述的计算机实施的方法,其中:如果所述实际性能度量小于所述目标性能度量,则所述速度调整为正;以及如果所述实际性能度量大于所述目标性能度量,则所述速度调整为负。9.根据权利要求1所述的计算机实施的方法,其中,所述实际性能度量是所述偏差的递减函数。10.根据权利要求9所述的计算机实施的方法,其中:如果所述实际性能度量小于所述目标性能度量,则所述速度调整为负;以及如果所述实际性能度量大于所述目标性能度量,则所述速度调整为正。11.一种包括指令的非暂时性计算机可读介质,当由一个或多个处理器执行所述指令时,使所述一个或多个处理器执行用于控制在建筑工地内操作的建筑机械的速度的操作,所述操作包括:在所述建筑机械以所述速度向前或向后方向移动的同时,使用所述建筑机械的一个或多个传感器捕获传感器数据;
基于使用所述一个或多个传感器捕获的所述传感器数据来估计所述建筑工地的实际表面;计算目标表面和所述实际表面之间的偏差;基于所述偏差计算实际性能度量;比较所述实际性能度量与目标性能度量以确定速度调整,其中,确定所述速度调整以便减小所述实际性能度量与所述目标性能度量之间的误差;并且通过所述速度调整来调整所述建筑机械的所述速度。12.根据权利要求11所述的非暂时性计算机可读介质,其中,所述偏差包括所述目标表面与所述实际表面之间的多个距离。13.根据权利要求11所述的非暂时性计算机可读介质,其中,通过所述速度调整来调整所述建筑机械的所述速度包括:将所述速度调整提供给所述建筑机械的速度控制器。14.根据权利要求11所述的非暂时性计算机可读介质,其中,所述一个或多个传感器包括安装到所述建筑机械的工具上的惯性传感器。15.根据权利要求14所述的非暂时性计算机可读介质,其中,所述惯性传感器被配置为在所述建筑机械移动的同时检测所述工具的垂直移动。16.一种系统,包括:一个或多个处理器;以及包括指令的计算机可读介质,当由一个或多个处理器执行所述指令时,使所述一个或多个处理器执行操作,所述操作包括:在建筑机械以速度向前或向后方向移动的同时,使用所述建筑机械的一个或多个传感器捕获传感器数据;基于使用所述一个或多个传感器捕获的所述传感器数据来估计建筑工地的实际表面;计算目标表面和所述实际表面之间的偏差;基于所述偏差计算实际性能度量;比较所述实际性能度量与目标性能度量以确定速度调整,其中,确定所述速度调整以便减小所述实际性能度量与所述目标性能度量之间的误差;并且通过所述速度调整来调整所述建筑机械的所述速度。17.根据权利要求16所述的系统,其中,所述偏差包括所述目标表面与所述实际表面之间的多个距离。18.根据权利要求16所述的系统,其中,通过所述速度调整来调整所述建筑机械的所述速度包括:将所述速度调整提供给所述建筑机械的速度控制器。19.根据权利要求16所述的系统,其中,所述一个或多个传感器包括安装到所述建筑机械的工具上的惯性传感器。20.根据权利要求19所述的系统,其中,所述惯性传感器被配置为在所述建筑机械移动的同时检测所述工具的垂直移动。
技术总结
本文描述了用于控制在建筑工地内操作的建筑机械的速度的系统、方法和其他技术。在建筑机械以该速度向前或向后方向移动的同时,使用建筑机械的一个或多个传感器捕获传感器数据。基于传感器数据估计建筑工地的实际表面。计算目标表面和实际表面之间的偏差。基于该偏差计算实际性能度量。比较实际性能度量与目标性能度量以确定速度调整。通过速度调整来调整建筑机械的速度。建筑机械的速度。建筑机械的速度。
技术研发人员:詹森
受保护的技术使用者:卡特彼勒特林布尔控制技术有限责任公司
技术研发日:2021.11.19
技术公布日:2023/9/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。