1.本发明涉及反铲挖掘机等作业机。
背景技术:
2.以往,已知有专利文献1所公开的作业机。在专利文献1所公开的作业机中,在驾驶席的侧方设置有操作体,该操作体包含安装有操作多个液压致动器的操纵构件的操纵台。该操作体构成为能够切换为妨碍驾驶员相对于驾驶席乘降的第一姿势和允许驾驶员相对于驾驶席乘降的第二姿势。多个液压致动器在操作体处于第一姿势时被允许动作,在操作体处于第二姿势时被阻止动作。
3.另外,在机体装备有将操纵构件对多个液压致动器的操作模式切换为多个操作模式的模式切换构件。在先技术文献专利文献
4.专利文献1:日本国专利公开公报“日本特开2014-32462号公报”
技术实现要素:
发明要解决的课题
5.作为模式切换构件的操作方法,推荐在操作体处于第二姿势时进行模式切换构件的操作。但是,在以往的作业机中,即使在操作体处于第一姿势时,也能够进行模式切换构件的操作。鉴于上述问题点,本发明的目的在于提供一种能够防止在使操作体处于第一姿势的状态下进行模式切换构件的操作的作业机。用于解决课题的技术方案
6.本发明的一个方式的作业机具备:机体;驾驶席,其搭载于所述机体;操作体,其设置于所述驾驶席的附近,能够切换为妨碍驾驶员相对于所述驾驶席乘降的第一姿势和允许驾驶员相对于所述驾驶席乘降的第二姿势;多个液压致动器,其在所述操作体处于所述第一姿势时被允许动作,在所述操作体处于所述第二姿势时被阻止动作;操纵构件,其操作所述多个液压致动器;以及模式切换构件,其将所述操纵构件针对所述多个液压致动器的操作模式切换为多个操作模式,所述模式切换构件在所述操作体处于所述第一姿势时至少一部分被该操作体覆盖而不能操作或操作困难,在所述操作体处于所述第二姿势时能够操作地露出。
7.另外,具备:多个控制阀,其与所述各液压致动器对应地设置,对所述液压致动器进行液压控制;检测传感器,其检测所述操纵构件的操作方向以及操作量;以及控制装置,其获取来自所述检测传感器的检测信号并对所述控制阀进行电控制,所述模式切换构件由向所述控制装置发送与所述多个操作模式的切换操作位置对应的切换操作信号的开关构成,所述控制装置具有基于来自所述模式切换构件的切换操作信号来切换所述操作模式的
模式切换部。
8.另外,所述操作体包括配置在所述驾驶席的侧方的操纵台,所述操纵台安装有所述操纵构件,所述操纵台具有覆盖该操纵台的支承构造体的下方开放状的操纵台罩,在所述操作体处于所述第一姿势时,所述模式切换构件位于所述操纵台罩的内部侧的下端侧,且至少上部位于比所述操纵台罩的覆盖该模式切换构件的前方及侧方的壁部的下端靠上方的位置。另外,具备支承所述驾驶席的座椅台,所述操纵台的后部枢轴支承于所述座椅台侧,前部侧能够沿上下方向摆动,且能够通过从接近所述座椅台的所述第一姿势向上方摆动操作而切换为所述第二姿势,所述模式切换构件配置于所述座椅台上且配置于所述操纵台的前部下方。
9.另外,在所述操作体处于所述第一姿势时,所述模式切换构件能够从所述驾驶席与所述操纵台之间的间隙视觉确认所述多个操作模式的切换操作位置。另外,所述操纵台罩在所述驾驶席侧的壁部的后部侧具有向该驾驶席侧开放的侧方开放部,所述模式切换构件配置于比所述侧方开放部的前缘靠后方的位置,能够经由所述侧方开放部视觉确认所述多个操作模式的切换操作位置。发明效果
10.根据上述的作业机,在使操作体成为第二姿势的状态下能够进行模式切换构件的操作,但能够防止在使操作体成为第一姿势的状态下进行模式切换构件的操作。
附图说明
11.图1是作业机的侧视图。图2是表示驾驶室以及驾驶部的立体图。图3是表示控制系统的结构图。图4是从右斜前方观察驾驶部的立体图。图5是表示模式切换构件的配置部分的主视图。图6是表示模式切换构件的配置部分的俯视图。图7是表示模式切换构件的配置部分的立体图。图8是第一操纵台的右侧视图。图9是驾驶部的侧视图。图10是操纵台罩的分解立体图。图11是表示模式切换构件的配置部分的侧视放大图。图12是模式切换构件的俯视图。图13是表示模式切换构件的视觉确认状态的俯视立体图。图14是表示模式切换构件的其他的视觉确认状态的俯视立体图。图15是表示模式切换构件的其他的视觉确认状态的俯视立体图。
具体实施方式
12.以下,适当参照附图对本发明的一个实施方式进行说明。图1是表示本实施方式的作业机1的整体结构的概略侧视图。在本实施方式中,作
为作业机1,例示了作为回转作业机1的反铲挖掘机。如图1所示,作业机1具备机体(回转台)2、行驶装置3以及作业装置4。在机体2搭载有驾驶室5。在驾驶室5的室内设置有供驾驶员(操作员)就座的驾驶席(坐席)6。驾驶席6被驾驶室5包围。驾驶席6具有作为供驾驶员就座的部位的座部6a、以及作为承受驾驶员的背部的部位的靠背部6b。
13.在本实施方式中,将朝向就座于作业机1的驾驶席6的驾驶员(操作员)的前侧的方向(图1的箭头a1方向)设为前方,将朝向驾驶员的后侧的方向(图1的箭头a2方向)设为后方,将图1的箭头k1方向设为前后方向,将驾驶员的左侧(图1的近前侧)设为左方,将驾驶员的右侧(图1的里侧)设为右方来进行说明。另外,如图1所示,将与前后方向k1正交的方向即水平方向作为机体宽度方向(机体2的宽度方向)进行说明。将从机体2的宽度方向的中央部朝向右部或左部的方向作为机体外方(机体宽度方向的外方)进行说明。换言之,机体外方是指机体宽度方向且远离机体2的宽度方向的中心的方向。将与机体外方相反的方向作为机体内方(机体宽度方向的内方)进行说明。换言之,机体内方是指机体宽度方向且接近机体2的宽度方向的中心的方向。
14.如图1所示,行驶装置3是将机体2支承为能够行驶的装置。行驶装置3通过由液压马达(液压致动器)或电动马达等构成的行驶马达11来驱动。另外,在本实施方式中使用履带式的行驶装置3,但不限于此,也可以使用轮式等行驶装置。在行驶装置3的前部安装有推土装置7。推土装置7具有推土铲(推土板)7a、固定于推土铲7a的背面侧且后部枢轴支承于行驶装置3的框架而能够上下移动的推土铲臂7b、使推土铲臂7b上下移动的推土铲缸(液压缸)7c。
15.机体2具有由构成底部的钢板等形成的回转基板9,回转基板9经由回转轴承8以能够绕着在上下方向上延伸的回转轴心x1回转的方式支承于行驶装置3。在回转基板9安装有由绕回转轴心x1旋转驱动机体2的液压马达(液压致动器)构成的回转马达12。在机体2的后部搭载有配重10及原动机。原动机是柴油发动机。另外,原动机既可以是汽油发动机或者电动马达,也可以是具有发动机以及电动马达的混合动力型。
16.机体2在前部具有支承作业装置4的支承托架20以及摆动托架21。支承托架20从机体2向前方以突出状设置。在支承托架20的前部(从机体2突出的部分)以能够绕纵轴(沿上下方向延伸的轴心)摆动的方式安装有摆动托架21。摆动托架21由摆动缸(液压缸)摆动驱动。
17.如图1所示,作业装置4具有动臂装置30、斗杆装置40以及作业工具装置50。动臂装置30具有动臂31和动臂缸(液压致动器)32。动臂31的基部经由在机体宽度方向上延伸的横轴35以能够摆动(转动自如)的方式支承于摆动托架21的上部。动臂缸32由能够伸缩的液压缸构成,横跨摆动托架21和动臂31的中途部设置,通过伸缩而使动臂31摆动。
18.斗杆装置40具有斗杆41和斗杆缸(液压致动器)42。斗杆41的基端部经由横轴43摆动自如地支承于动臂31的前端部。斗杆缸42由能够伸缩的液压缸构成,横跨斗杆41的基部和动臂31的中途部设置,通过伸缩而使斗杆41摆动。
19.作业工具装置50具有作为作业工具的铲斗51和作为作业工具缸的铲斗缸(液压致动器)52。铲斗51经由枢轴57摆动自如地支承于斗杆41的前端部。铲斗缸52由能够伸缩的液压缸构成,横跨设于铲斗51与斗杆41的前端部之间的连杆机构53和斗杆41的基部设置,通
过伸缩而使铲斗51摆动。
20.如图1所示,在驾驶室5的侧面(左侧面)设置有门5a。门5a的后部由铰链13以能够绕纵轴转动的方式支承,通过绕铰链13转动,前部向机体宽度方向的外方侧移动而对乘降口5b进行开闭。乘降口5b是用于驾驶员相对于驾驶室5(驾驶席6)乘降的开口。如图2所示,在驾驶室5内设置有驾驶席6以及包含该驾驶席6的周围的装置、部件的驾驶部14。驾驶部14具有配置于驾驶席6的左和右的操纵台61。将配置于驾驶席6的左方的操纵台61称为第一操纵台61l,将配置于驾驶席6的右方的操纵台61称为第二操纵台61r。在第一操纵台61l上安装有操作多个液压致动器的第一操纵杆(操纵构件62)62l和在上下方向上摆动操作第一操纵台61l的操作杆63。在第二操纵台61r上安装有操作多个液压致动器的第二操纵杆(操纵构件62)62r和操纵推土装置7的推土铲杆64。
21.第一操纵杆62l和第二操纵杆62r都能够对装备于作业机1的2个操作对象进行操作。第一操纵杆62l以及第二操纵杆62r的操作对象例如是回转马达12、动臂缸32、斗杆缸42、铲斗缸52。即,操纵构件62能够进行机体2的回转操作、斗杆41的摆动操作、铲斗51的摆动操作、动臂31的摆动操作。第一操纵杆62l以及第二操纵杆62r(操纵构件)的操作方向以及摆动量由检测传感器65(参照图3)检测。
22.详细而言,如图3所示,第一操纵杆62l的操作方向及摆动量由第一检测传感器65l检测。第二操纵杆62r的操作方向及摆动量由第二检测传感器65r检测。第一检测传感器65l以及第二检测传感器65r与控制装置66连接。控制装置66能够获取第一检测传感器65l以及第二检测传感器65r的检测信号。控制装置66例如利用具备cpu(central processing unit:中央处理单元)、eeprom(electrically erasable programmable read-only memory:电可擦可编程只读存储器)等的微型计算机而构成。
23.图3表示对回转马达12、动臂缸32、斗杆缸42、铲斗缸52进行控制的控制系统s1。控制系统s1具有对回转马达12进行液压控制的回转用控制阀v1、对动臂缸32进行液压控制的动臂用控制阀v2、对斗杆缸42进行液压控制的斗杆用控制阀v3、对铲斗缸52进行液压控制的铲斗用控制阀v4。回转用控制阀v1、动臂用控制阀v2、斗杆用控制阀v3以及铲斗用控制阀v4由被控制装置66电控制的电磁阀构成。第一检测传感器65l以及第二检测传感器65r的检测信号被发送至控制装置66。控制装置66基于来自第一检测传感器65l以及第二检测传感器65r的检测信号,控制对操作对象进行控制的控制阀。
24.在此,对第一操纵杆62l及第二操纵杆62r的操作模式的一例进行说明。第一操纵杆62l以及第二操纵杆62r能够在前后方向k1(前后)进行倾动操作且能够在机体宽度方向(左右)进行倾动操作。通过第一操纵杆62l的前后的倾动操作,斗杆41进行摆动动作,通过第一操纵杆62l的左右的倾动操作,机体2进行回转动作。另外,通过第二操纵杆62r的前后的倾动操作,动臂31进行摆动动作,通过第二操纵杆62r的左右的倾动操作,铲斗51进行摆动动作。
25.控制装置66具有将针对多个液压致动器的操纵构件62的操作模式切换为多个操作模式的模式切换部66a。在本实施方式中,操作模式能够包含前述的操作模式而切换为4个操作模式。第一操作模式是前述的操作模式。
26.在第二操作模式中,通过第一操纵杆62l的前后的倾动操作,机体2进行回转动作,
通过第一操纵杆62l的左右的倾动操作,斗杆41进行摆动动作。另外,通过第二操纵杆62r的前后的倾动操作,动臂31进行摆动动作,通过第二操纵杆62r的左右的倾动操作,铲斗51进行摆动动作。在第三操作模式中,通过第一操纵杆62l的前后的倾动操作,动臂31进行摆动动作,通过第一操纵杆62l的左右的倾动操作,铲斗51进行摆动动作。另外,通过第二操纵杆62r的前后的倾动操作,斗杆41进行摆动动作,通过第二操纵杆62r的左右的倾动操作,机体2进行回转动作。
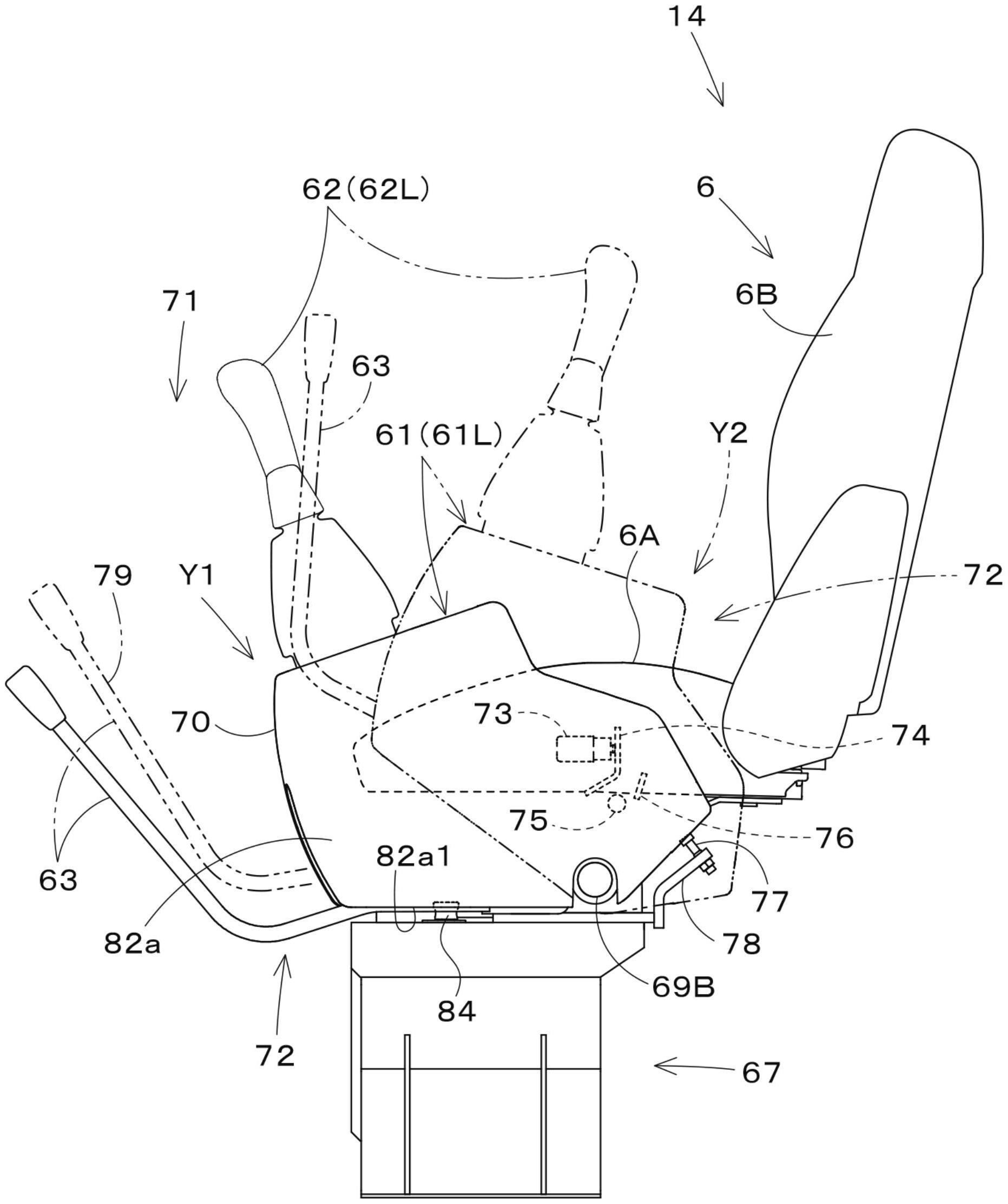
27.在第四操作模式中,通过第一操纵杆62l的前后的倾动操作,动臂31进行摆动动作,通过第一操纵杆62l的左右的倾动操作,铲斗51进行摆动动作。另外,通过第二操纵杆62r的前后的倾动操作,斗杆41进行摆动动作,通过第二操纵杆62r的左右的倾动操作,机体2进行回转动作。如图2所示,驾驶席6搭载于在驾驶室5(机体2)的地板部5a上设置的座椅台67。
28.如图4所示,座椅台67具有:竖立设置于地板部5a的第一腿部67a;在第一腿部67a的右方隔开间隔地配置并竖立设置于地板部5a的第二腿部67b;以及横跨第一腿部67a的上端和第二腿部67b的上端而设置的上壁部67c。驾驶席6经由支承台68设置于座椅台67上。支承台68的机体宽度方向的宽度形成为比座椅台67的宽度窄,座椅台67的上壁部67c从支承台68向左方及右方突出。驾驶席6以能够经由滑轨在前后方向上进行位置调整的方式搭载于支承台68。
29.如图4、图5、图6所示,第一操纵台61l配置在驾驶席6的左方且座椅台67的上壁部67c的左部上方,并且安装且支承于座椅台67。如图4、图7、图8所示,操纵台61具有支承构造体69和覆盖支承构造体69的下方开放状的操纵台罩70。支承构造体69具有安装有第一操纵杆62l等的框架构件69a、将该框架构件69a等支承为能够绕沿机体宽度方向延伸的轴心转动的转动轴69b、安装有该转动轴69b且设置于座椅台67的上壁部67c的支承托架69c、使框架构件69a转动的转动机构69d等。
30.如图9所示,转动轴69b配置在第一操纵台61l的后部的下端侧。因此,第一操纵台61l可绕后部的下端侧的枢轴支承部分(转动轴69b)在上下方向上摆动。第一操纵台61l能够切换为图9中实线所示的第一姿势y1和从第一姿势y1向上方摆动的姿势且图9中以双点划线表示的第二姿势y2。在图9所示的侧视时,第一操纵台61l的比转动轴69b靠前方侧的下端在第一姿势y1下与座椅台67的上壁部67c接近且大致平行状地配置,在第二姿势y2下为随着朝向前方而向上方转移的倾斜状。
31.如图9中实线所示,在第一姿势y1下,第一操纵台61l的前部比驾驶席6的座部6a更向前方突出,操作杆63从第一操纵台61l向前方突出。因此,第一姿势y1是妨碍驾驶员相对于驾驶席6乘降的姿势。详细而言,第一姿势y1是妨碍驾驶员经由驾驶席6与乘降口5b之间的乘降用通路71乘降的姿势。
32.如图9中双点划线所示,在第二姿势y2下,第一操纵台61l为随着朝向前方而向上方转移的倾斜状,操作杆63与第一操纵台61l一起绕转动轴69b向上方摆动,并从乘降用通路71退避。因此,第二姿势y2是允许驾驶员相对于驾驶席6乘降的姿势。详细而言,第二姿势y2是允许驾驶员经由驾驶席6与乘降口5b之间的乘降用通路71乘降的姿势。
33.在本实施方式中,由第一操纵台61l以及操作杆63构成配置于驾驶席6的附近且能
够切换为第一姿势y1和第二姿势y2的操作体72。另外,操作体72只要是配置在驾驶席6的附近的构件即可,例如,操作体72也可以是配置在驾驶席6的前方侧的构件,是能够切换为第一姿势y1和第二姿势y2的构件。如图9所示,第一操纵台61l具有检测开关73、抵接构件74、枢轴75、限制抵接部76以及止挡构件77。检测开关73、抵接构件74、枢轴75以及限制抵接部76设置于转动机构69d,止挡构件77安装于固定在支承托架69c上的撑杆构件78。
34.如图9所示,在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,抵接构件74与检测开关73的触头抵接,检测出第一操纵台61l及操作杆63(操作体72)处于第一姿势y1。如图3所示,检测开关73与控制装置66连接。控制装置66能够获取检测开关73的检测信号。控制装置66在获取到来自检测开关73的检测信号时,允许回转马达12、动臂缸32、斗杆缸42、铲斗缸52的动作。即,在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,控制装置66基于来自第一检测传感器65l及第二检测传感器65r的指令信号,控制回转用控制阀v1、动臂用控制阀v2、斗杆用控制阀v3及铲斗用控制阀v4。
35.接着,如图9所示,通过把持操作杆63向上方提起,将第一操纵台61l及操作杆63(操作体72)从第一姿势y1切换为第二姿势y2时,首先,操作杆63如双点划线79所示,绕枢轴75向上方摆动,并且抵接构件74与此连动地从检测开关73的触头离开,接着,在抵接构件74离开检测开关73的触头的状态下,第一操纵台61l及操作杆63(操作体72)绕转动轴69b一体转动而摆动到第二姿势y2。在抵接构件74处于离开检测开关73的触头的状态、且控制装置66未获取到来自检测开关73的检测信号的状态时,控制装置66阻止回转马达12、动臂缸32、斗杆缸42、铲斗缸52的动作。即,在第一操纵台61l及操作杆63(操作体72)处于第二姿势y2时,控制装置66即使获取到来自第一检测传感器65l及第二检测传感器65r的检测信号,也不向回转用控制阀v1、动臂用控制阀v2、斗杆用控制阀v3及铲斗用控制阀v4发送控制信号,不控制这些控制阀。
36.另一方面,在第一操纵台61l及操作杆63(操作体72)处于第二姿势y2时,限制抵接部76与止挡构件77抵接,限制第一操纵台61l从第一姿势y1向第二姿势y2转动的方向的移动。另外,第一操纵台61l由设置于转动机构69d的保持机构保持为第一姿势y1及第二姿势y2。如图10所示,操纵台罩70具有上部罩81和下部罩82。上部罩81与下部罩82相互连结并且安装于框架构件69a。上部罩81具有作为驾驶席6的相反侧的侧壁的外侧壁81a、作为驾驶席6侧的侧壁的内侧壁81b、前壁81c、后壁81d、上壁81e。下部罩82具有作为驾驶席6的相反侧的侧壁的外侧壁82a、作为驾驶席6侧的侧壁的内侧壁82b、前壁82c和后壁82d。内侧壁82b从前壁82c的右端缘部朝向后方延伸设置到操纵台罩70的前后方向中途部而形成。
37.由上部罩81的外侧壁81a和下部罩82的外侧壁82a构成操纵台罩70的外侧壁70a。由上部罩81的内侧壁81b和下部罩82的内侧壁82b构成操纵台罩70的内侧壁70b。由上部罩81的前壁81c和下部罩82的前壁82c构成操纵台罩70的前壁70c。由上部罩81的后壁81d和下部罩82的后壁82d构成操纵台罩70的后壁70d。上部罩81的上壁81e构成操纵台罩70的上壁。下部罩82的下表面侧为下方开放状。即,操纵台罩70为下方开放状。
38.如图8所示,操纵台罩70在内侧壁70b(驾驶席6侧的壁部)的后部侧具有向该驾驶席6侧开放的侧方开放部83。侧方开放部83由上部罩81的内侧壁81b的下缘81g和下部罩82
的内侧壁82b的后缘82g形成。如图4~图7所示,在驾驶席6的侧方(左侧方)且在第一操纵台61l的下方配置有将操纵构件62的操作模式切换为多个操作模式的模式切换构件84。模式切换构件84配置在支承台68的左侧方的上壁部67c上,且配置在该上壁部67c的前部。
39.模式切换构件84由旋转开关(开关)构成,以能够绕纵轴转动的方式安装于在座椅台67的上壁部67c安装的基座板85上。如图3所示,模式切换构件84与控制装置66连接。控制装置66能够获取来自模式切换构件84的切换操作信号。当控制装置66获取到来自模式切换构件84的切换操作信号时,模式切换部66a将操纵构件62的操作模式设定为与模式切换构件84的切换操作位置对应的操作模式。即,将操作模式设定为第一操作模式~第四操作模式中的任意一个。
40.如图12所示,在基座板85的前部(模式切换构件84的前部的周围),从左起依次设置有i标记86a、h标记86b、m标记86c、k标记86d。在模式切换构件84设置有指标部84a。通过使模式切换构件84转动而使指标部84a与i标记86a、h标记86b、m标记86c、k标记86d中的任一个对齐,能够进行操纵构件62的操作模式的切换。例如,若使指标部84a与i标记86a对齐,则模式切换部66a将操纵构件62的操作模式切换为第一操作模式,若使指标部84a与h标记86b对齐,则模式切换部66a将操纵构件62的操作模式切换为第二操作模式,若使指标部84a与m标记86c对齐,则模式切换部66a将操纵构件62的操作模式切换为第三操作模式,若使指标部84a与k标记86d对齐,则模式切换部66a将操纵构件62的操作模式切换为第四操作模式。
41.如图6、图9、图11所示,模式切换构件84在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,位于第一操纵台61l的前部下方,并且位于操纵台罩70的内部侧的下端侧。因此,在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,模式切换构件84从上方被第一操纵台61l(操作体72)覆盖,该模式切换构件84无法从上方进行操作。另外,如图5、图11所示,在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,模式切换构件84的上部位于比操纵台罩70的作为覆盖模式切换构件84的前方的壁部的前壁82c的下端82c1及作为覆盖外侧方的壁部的外侧壁82a的下端82a1靠上方的位置。即,在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,前壁82c及外侧壁82a成为障碍,难以从前方及外侧方(左方)对模式切换构件84进行操作。
42.需要说明的是,模式切换构件84只要在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,至少上部位于比前壁82c的下端82c1及外侧壁82a的下端82a1靠上方的位置即可,模式切换构件84的整体也可以位于比前壁82c的下端82c1及外侧壁82a的下端82a1靠上方的位置。
43.另外,如图8所示,模式切换构件84位于比侧方开放部83的前缘(内侧壁82b的后缘82g)靠后方的位置,且在第一操纵台61l的右侧面侧露出。然而,由于驾驶席6位于第一操纵台61l的内侧方(右侧方)且第一操纵台61l与驾驶席6之间的间隙87窄,因此难以从驾驶席6侧接近模式切换构件84。即,难以从驾驶席6侧对模式切换构件84进行操作。
44.另外,在操作体72处于第一姿势y1时,不必使模式切换构件84的整体从上方被第一操纵台61l(操作体72)覆盖,只要模式切换构件84的至少一部分被覆盖,以使得来自驾驶席6侧的操作变得困难的程度或者无法进行操作即可。例如,也可以构成为,在操作体72处
于第一姿势y1时,模式切换构件84的一部分配置于操作体72的下方,模式切换构件84的另一部分配置于驾驶席6与操作体72之间的空间的下方。或者,也可以是在操作体72处于第一姿势y1时,模式切换构件84从操作体72的下方遍及驾驶席6的下方而配置的结构。另外,也可以构成为,将模式切换构件84配置在驾驶席6的下方、或者从驾驶席6的下方遍及驾驶席6与操作体72之间的空间的下方,在操作体72处于第一姿势y1时,模式切换构件84的侧方被第一操纵台61l覆盖。
45.如上所述,在第一操纵台61l及操作杆63(操作体72)处于第一姿势y1时,无法进行模式切换构件84的操作或操作困难。因此,在第一操纵台61l以及操作杆63(操作体72)处于第一姿势y1时,能够防止在液压致动器的动作被允许的情况下模式切换构件84被操作。
46.另一方面,如图9、图11所示,当第一操纵台61l及操作杆63(操作体72)从第一姿势y1姿势变更为第二姿势y2时,第一操纵台61l绕转动轴69b向上方摆动,模式切换构件84露出。在该状态下,模式切换构件84能够操作。即,模式切换构件84在第一操纵台61l及操作杆63(操作体72)处于第二姿势y2时能够操作地露出。因此,在第一操纵台61l及操作杆63(操作体72)处于第二姿势y2时,在液压致动器的动作被阻止的情况下,能够对模式切换构件84进行操作。
47.如图11所示,第一操纵台61l在处于第二姿势y2时,为侧视时下端随着朝向前方而向上方转移的倾斜状,因此能够从前方容易地接近模式切换构件84,能够从第一操纵台61l的前方容易地对模式切换构件84进行操作。如图13所示,在操作体72处于第一姿势y1的状态下,能够从驾驶席6与第一操纵台61l之间的间隙87视觉确认模式切换构件84的切换操作位置。即,模式切换构件84配置于在操作体72处于第一姿势y1时能够从驾驶席6与操纵台61之间的间隙87视觉确认多个操作模式的切换操作位置的位置。该模式切换构件84的切换操作位置的视觉确认也可以在驾驶员坐在驾驶席6上的状态下进行。在图13中,示出了能够看到h标记86b和m标记86c的一部分的状态,但如图14、图15所示,通过驾驶员改变观察模式切换构件84的位置,也能够观察其他标记。
48.另外,如图8所示,模式切换构件84位于比侧方开放部83的前缘(内侧壁82b的后缘82g)靠后方的位置。因此,能够经由侧方开放部83容易地视觉确认多个操作模式的切换操作位置。另外,也可以在操纵台罩70设置观察窗,经由该观察孔,在第一姿势y1下能够进行模式切换构件84的视觉确认。
49.然而,在对控制液压致动器的控制阀进行电控制的作业机1中,也有利用配置于驾驶席6的前方的仪表来进行操作模式的切换的方法,但仪表的变更操作是麻烦的,需要始终在画面上显示操作模式。另外,在仪表显示操作模式的情况下,也存在较小且难以观察的问题,但在本实施方式中,将模式切换构件84设为开关构造,因此能够消除这样的问题。
50.另外,在以上的作业机1中,在租赁业者将作业机1出库之前,能够容易地进行操纵构件62的操作模式的变更,另外,处于能够立即确认操纵构件62的操作模式的位置。另外,在驾驶员乘坐作业机1之前也能够容易地确认。另外,在本实施方式中,对在对液压致动器进行液压控制的控制阀进行电控制的系统中,通过由开关构成的模式切换构件84的切换来切换操纵构件62的操作模式的情况进
行了说明,但并不限定于此,在对控制液压致动器的控制阀进行液压控制的系统中,在利用由旋转阀构成的模式切换构件84进行工作油的路径的切换来切换操纵构件62的操作模式的情况下也能够采用。
51.上述作业机1具备:机体2;驾驶席6,搭载于机体2;操作体72,设置于驾驶席6的附近,能够切换为妨碍驾驶员相对于驾驶席6乘降的第一姿势y1和允许驾驶员相对于驾驶席6乘降的第二姿势y2;多个液压致动器(回转马达12、动臂缸32、斗杆缸42、铲斗缸52),在操作体72处于第一姿势y1时被允许动作,在操作体72处于第二姿势y2时被阻止动作;操纵构件62,操作多个液压致动器;以及模式切换构件84,将操纵构件62针对多个液压致动器的操作模式切换为多个操作模式,模式切换构件84在操作体72处于第一姿势y1时至少一部分被该操作体72覆盖而不能操作或操作困难,在操作体72处于第二姿势y2时能够操作地露出。
52.根据该结构,在使操作体72成为第二姿势y2的状态下能够进行模式切换构件84的操作,但能够防止在使操作体72成为第一姿势y1的状态下进行模式切换构件84的操作。另外,具备与各液压致动器对应地设置并对液压致动器进行液压控制的多个控制阀(回转用控制阀v1、动臂用控制阀v2、斗杆用控制阀v3、铲斗用控制阀v4)、对操纵构件62的操作方向以及操作量进行检测的检测传感器65、以及获取来自检测传感器65的检测信号并对控制阀进行电控制的控制装置66,模式切换构件84由向控制装置66发送与多个操作模式的切换操作位置对应的切换操作信号的开关构成,控制装置66具有基于来自模式切换构件84的切换操作信号来切换操作模式的模式切换部66a。
53.根据该结构,能够紧凑地构成模式切换构件84,并且能够紧凑地进行配置。另外,操作体72包括配置在驾驶席6的侧方且安装有操纵构件62的操纵台61,操纵台61具有覆盖该操纵台61的支承构造体69的下方开放状的操纵台罩70,模式切换构件84在操作体72处于第一姿势y1时,位于操纵台罩70的内部侧的下端侧,且至少上部位于比操纵台罩70的覆盖该模式切换构件84的前方及侧方的壁部(前壁82c、外侧壁82a)的下端82a1、82c1靠上方的位置。
54.根据该结构,在操作体72处于第一姿势y1时,能够防止对模式切换构件84进行操作。另外,具备支承驾驶席6的座椅台67,操纵台61的后部枢轴支承于座椅台67侧,前部侧能够沿上下方向摆动,且能够通过从接近座椅台67的第一姿势y1向上方摆动操作而切换为第二姿势y2,模式切换构件84配置于座椅台67上且配置于操纵台61的前部下方。
55.根据该结构,在使操作体72成为第二姿势y2的状态下,能够容易地从座椅台67的前方对模式切换构件84进行操作。另外,模式切换构件84在操作体72处于第一姿势y1时,能够从驾驶席6与操纵台61之间的间隙87视觉确认多个操作模式的切换操作位置。根据该结构,即使在操作体72处于第一姿势y1时,也能够进行模式切换构件84的切换操作位置的确认。
56.另外,操纵台罩70在驾驶席6侧的壁部的后部侧具有向该驾驶席6侧开放的侧方开放部83,模式切换构件84配置于比侧方开放部83的前缘(内侧壁82b的后缘82g)靠后方的位置,能够经由侧方开放部83视觉确认多个操作模式的切换操作位置。根据该结构,能够更容易地进行操作体72处于第一姿势y1时的操作模式的确认。
57.以上,对本发明的一个实施方式进行了说明,但应该认为本次公开的实施方式在所有方面都是例示而不是限制性的。本发明的范围不是由上述说明表示,而是由请求保护的范围示出,意在包括与请求保护的范围等同的意思及范围内的所有变更。标号说明
58.2机体6驾驶席12液压致动器(回转马达)32液压致动器(动臂缸)42液压致动器(斗杆缸)52液压致动器(铲斗缸)61操纵台62操纵构件65检测传感器66控制装置66a模式切换部67座椅台70操纵台罩72操作体82a壁部(下部罩的外侧壁)82a1下端82c壁部(下部罩的前壁)82c1下端82g前缘(下部罩的内侧壁的后缘)83侧方开放部84模式切换构件87间隙v1控制阀(回转用控制阀)v2控制阀(动臂用控制阀)v3控制阀(斗杆用控制阀)v4控制阀(铲斗用控制阀)y1第一姿势y2第二姿势。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。