技术特征:
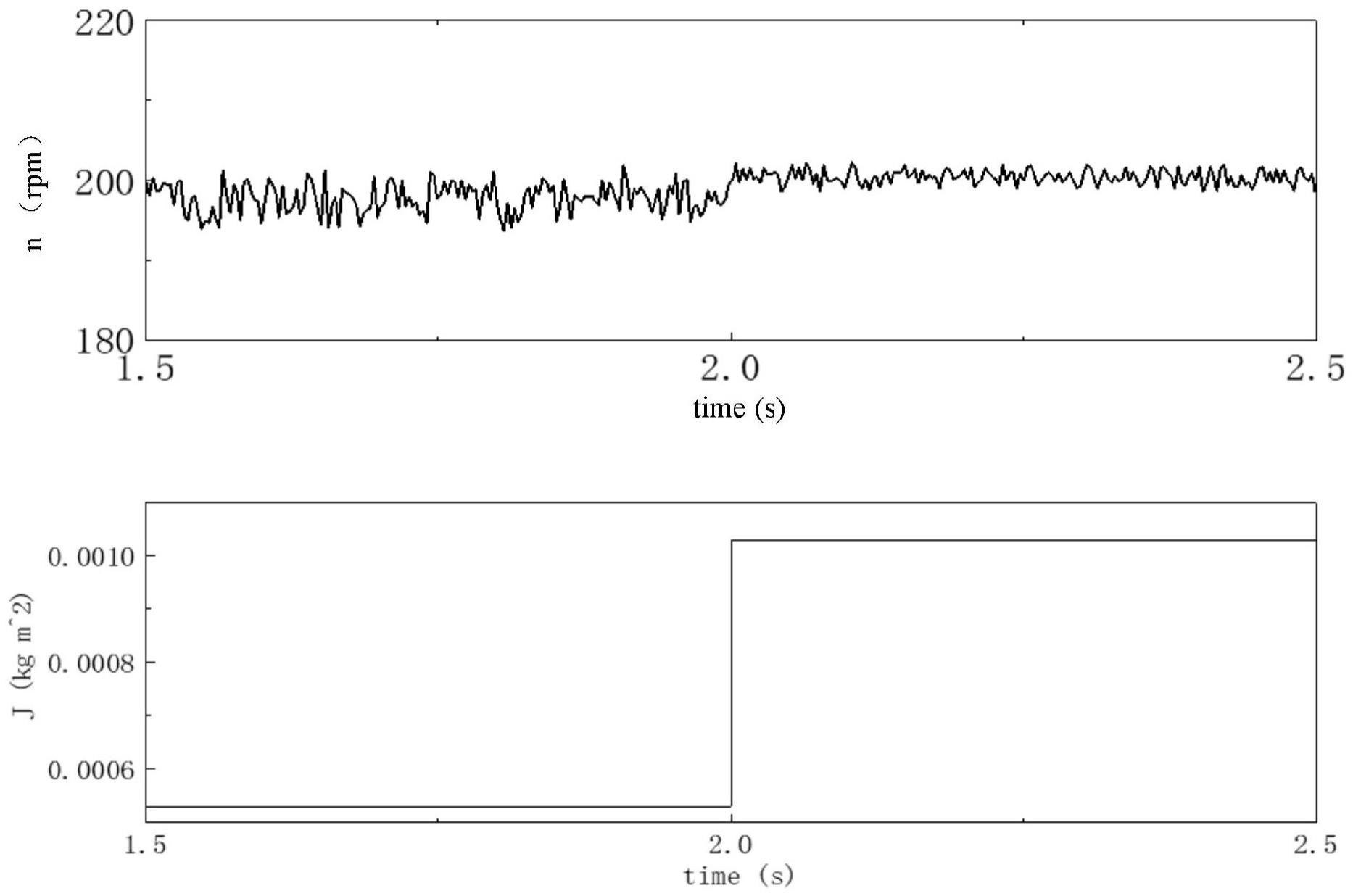
1.一种基于滑模的永磁同步电机抗惯量扰动控制方法,其特征在于,包括以下步骤:步骤一:依据电机机械运动方程,构建双环控制系统,将转动惯量设置为外部输入,使转动惯量在电机运行时发生改变,从而确定转动惯量辨识与电机转速的联系;步骤二:在控制系统模型中引入连续模型惯量观测器对转动惯量进行在线辨识;步骤三:设计积分时变快速终端滑模控制器,并将观测器在线辨识的转动惯量引入到滑模控制器中;步骤四:进行仿真,对比不同滑模控制器抗惯量扰动性能;步骤五:搭建实验平台,通过拆卸半轴钢套对负载惯量进行调节,观测不同量级的惯量变化下,积分时变快速终端滑模控制器对电机转速的稳定性和快速性的改进。2.根据权利要求1所述的一种基于滑模的永磁同步电机抗惯量扰动控制方法,其特征在于,所述步骤一中,为验证转动惯量的变动是否会引起电机转速的波动,在d-q坐标系下建立永磁同步电机的运动方程如式(1)所示,忽略阻尼系数后化简为式(2),由式(2)得到惯量与转速的关系如式(3)所示:量与转速的关系如式(3)所示:量与转速的关系如式(3)所示:其中,t
e
为电磁转矩;t
l
为负载转矩;j为转动惯量;b为阻尼系数;ω
m
为转子机械角速度。3.根据权利要求2所述的一种基于滑模的永磁同步电机抗惯量扰动控制方法,其特征在于,所述步骤二包括:建立惯量观测器对转动惯量进行观测:将电机所带的负载转矩设为恒值,则有对式(2)进行求导得到:定义状态量控制增益b=1/j,控制量则式(4)表示为:由式(5)得到可调模型如下:其中,为z,b的估计值;定义状态跟踪误差为则状态误差方程为:其中,为跟踪误差e的变化率,为状态量z的变化率;定义变量v=d(s)
·
e、其中,d(s)为线性补偿器;s为微分算子;控制增益的估计值可用比例积分自适应律来表示:
其中v为上述的定义变量,t为时间变量,τ为积分自变量;将式(8)代入式(7)得到:式中,φ1(v,t,τ),φ2(v,t)为v和t的非线性函数;找到φ1(v,t,τ)和φ2(v,t)的解满足popov超稳定理论:结合式(9),popov积分不等式表示为:式中,为有限正常数,t1为公式(9)中积分上下限之间的取值,η1(0,t1)是η(0,t)的积分项,η2(0,t1)是η(0,t)的比例项,η3(0,t1)是η(0,t)的常数项;由式(10)求得φ1(v,t,τ)和φ2(v,t)的解为:式中,k
i
,k
p
为积分系数和比例系数;由式(7)确定的传递函数h(s)为严格正实:取d(s)=s,则有h(s)=1,严格正实;此时有由此得到为:惯量辨识值由式(13)求得:4.根据权利要求3所述的一种基于滑模的永磁同步电机抗惯量扰动控制方法,其特征在于,所述步骤三包括:定义永磁同步电机系统的状态变量为:其中,ω
ref
为电机参考机械角速度,为一常量,ω
m
为实际机械角速度,x1为状态变量一,x2为状态变量二,为状态变量一的变化率;根据式(2)和式(14)得到:其中,k
t
为转矩常数,t
l
为负载转矩,i
q
为q轴电流,为q轴电流变化率,p
n
为极对数,ψ
f
为永磁体磁链;
定义系统的积分时变快速终端滑模面s为:式中,c,α,β,ρ,p,q为常数,p,q为正奇数,且c>0,β>0,ρ>0,1<p/q<2,sgn()为符号函数;定义趋近律为:其中ε,k,为趋近律系数且积分时变快速终端滑模控制器的控制率经计算为:其中,为q轴电流观测值,c,α,β,ρ,p,q为积分时变快速终端滑模面的滑模系数,ε,k,为趋近律系数。5.根据权利要求4所述的一种基于滑模的永磁同步电机抗惯量扰动控制方法,其特征在于,所述步骤四中的不同滑模控制器包括:smc,为常规滑模控制;ismc,为积分滑模控制;itsmc,为积分时变滑模控制;itftsmc,为积分时变快速终端滑模控制。
技术总结
本发明提供一种基于滑模的永磁同步电机抗惯量扰动控制方法,包括:依据电机机械运动方程,构建双环控制系统,将转动惯量设置为外部输入,使转动惯量在电机运行时发生改变,从而确定转动惯量辨识与电机转速的联系;在控制系统模型中引入连续模型惯量观测器对转动惯量进行在线辨识;设计积分时变快速终端滑模控制器,并将观测器在线辨识的转动惯量引入到滑模控制器中;进行仿真,对比不同滑模控制器抗惯量扰动性能;搭建实验平台,通过拆卸半轴钢套对负载惯量进行调节,观测不同量级的惯量变化下,积分时变快速终端滑模控制器对电机转速的稳定性和快速性的改进。本发明能够较为精确地辨识惯量,提高电机转速的稳定性能,提高电机转速的快速性能。机转速的快速性能。机转速的快速性能。
技术研发人员:谢芳 倪士林 王厚颖
受保护的技术使用者:安徽大学
技术研发日:2023.05.15
技术公布日:2023/8/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。