1.本公开属于遥感图像建筑物变化检测技术领域,尤其涉及一种基于神经网络的遥感图像变化检测方法及系统。
背景技术:
2.本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
3.变化检测主要指的是在视觉过程第一次注意到的变化。在变化检测任务中,如果计算机要执行这个过程,一般需要得到相同位置在不同时期的特征表示。因此,获取图像质量的好坏对检测结果有重要的影响。最近,随着发射卫星光谱分辨率的提高,遥感图像的精度也得到了极大的提高,这为地形检测和城市变化检测等任务提供了更精细的尺度表示。由于变化检测的目标为找到图像中感兴趣对象的变化情况,因此模型通常用于检测城市建筑物变化、地表水变化、地表森林覆盖率变化、水资源检测、城市场景分类、医疗领域等。根据不同的应用场景,需要注意不同的目标变化。一个好的变化检测模型应该能避免由大气变化、季节变化和光照强度变化所引起的无关变化,并能够从高分辨率图像中有效地提取获取特征信息,还原目标的大致轮廓。
4.据发明人了解,变化检测任务最初通过分类后比较(pcc)、主成分分析(pca)以及变化向量分析(cva)等传统方法进行特征提取,这些工作虽然在一定程度上满足了需求,但容易误分类,检测精度低,且训练样本依赖人工经验的选择;此后,出现了基于卷积神经网络(cnn)架构的变化检测模型,使得模型在多尺度特征提取方面有所提高,同时也提高了模型的泛化能力,随着进一步的研究,虽然基于cnn的模型已经取得了众多成果,但模型的缺点也显现出来,卷积运算由于感受野具有局限性,使得特征的长期语义信息表示性能有所降低,然而这些具有长注意力的语义信息在变化检测任务中起着非常重要的作用。为了解决这个问题,一些研究人员开始研究transformer结构,transformer是一种新型的网络结构,它能够提取更广泛的语义信息,由于transformer结构的引入,变化检测任务可以更充分地利用图像中的全局特征。
5.虽然这些方法能够以更高的效率和准确性处理变化任务,但目前仍然存在以下缺点:遥感影像变化通常较小,目前基于卷积或transformer的方法难以获得小型建筑物的清晰变化图;简单地使用transformer进行特征提取并不能充分利用双时态图像中更丰富的语义信息,因为双时态图像比单图像包含更多时间维度上的信息。
技术实现要素:
6.本公开为了解决上述问题,提供了一种基于神经网络的遥感图像变化检测方法及系统,所述方案基于提出的跳跃注意力计算方式,能够有效提升检测结果的精度,可为相关需求提供新的解决方法,大幅度提高城市变迁评估或灾后受损评估等管理工作的准确率和效率。
7.根据本公开实施例的第一个方面,提供了一种基于神经网络的遥感图像变化检测方法,包括:
8.获取不同时相的第一遥感图像和第二遥感图像;
9.采用基于多头跳跃注意力机制的transformer编码器,分别提取所述第一遥感图像和第二遥感图像在不同尺度下的全局空间特征和图像块空间特征,获得第一遥感图像融合特征和第二遥感图像融合特征;其中,所述多头跳跃注意力机制具体为:对于编码器的自注意力模块,其全局空间和图像块空间的跳跃注意力机制计算结果基于第一遥感图像和第二遥感图像之间的差异获得;
10.将不同尺度下的第一遥感图像融合特征和第二遥感图像融合特征进行融合后执行解码操作,获得多尺度特征图;
11.基于所述多尺度特征图,利用预设分类器获得变化图,实现遥感图像的变化检测。
12.进一步的,所述transformer编码器包括四个通道,所述第一遥感图像和第二遥感图像分别对应两个通道;对于每个遥感图像所对应的两个通道,其中,一个通道用于利用transformer编码器对第一遥感图像与第二遥感图像在全局空间的特征提取,另一个通道用于利用transformer编码器对第一遥感图像和第二遥感图像在图像块空间上的特征提取。
13.进一步的,所述图像块空间特征的提取,需将输入图像分割成若干不重叠的图像块,再将其馈送入基于多头跳跃注意力机制的transformer编码器。
14.进一步的,所述将不同尺度下的第一遥感图像融合特征和第二遥感图像融合特征进行融合,具体为:对于每一尺度,基于第一遥感图像融合特征和第二遥感图像融合特征计算两个图像的差异;将所述差异与第一遥感图像融合特征和第二遥感图像融合特征进行合并,获得初步融合特征;将各个尺度的初步融合特征按照尺度从小到大的顺序逐级合并,获得最终的融合特征。
15.进一步的,所述解码器采用多层感知机来聚合第一遥感图像和第二遥感图像的差异特征及原始特征。
16.进一步的,所述基于所述多尺度特征图,利用预设分类器获得变化图,具体为:基于所述多尺度特征图,利用预设分类器对有变化和无变化的区域进行分类,并对分类结果进行二值化表示,获得变化图。
17.根据本公开实施例的第二个方面,提供了一种基于神经网络的遥感图像变化检测系统,包括:
18.数据获取单元,其用于分别获取不同时相的第一遥感图像和第二遥感图像;
19.编码单元,其用于采用基于多头跳跃注意力机制的transformer编码器,分别提取所述第一遥感图像和第二遥感图像在不同尺度下的全局空间特征和图像块空间特征,获得第一遥感图像融合特征和第二遥感图像融合特征;其中,所述多头跳跃注意力机制具体为:对于编码器的自注意力模块,其全局空间和图像块空间的跳跃注意力机制计算结果基于第一遥感图像和第二遥感图像之间的差异获得;
20.解码单元,其用于将不同尺度下的第一遥感图像融合特征和第二遥感图像融合特征进行融合后执行解码操作,获得多尺度特征图;
21.检测单元,其用于基于所述多尺度特征图,利用预设分类器获得变化图,实现遥感
图像的变化检测。
22.根据本公开实施例的第三个方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,所述处理器执行所述程序时实现所述的一种基于神经网络的遥感图像变化检测方法。
23.根据本公开实施例的第四个方面,提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的一种基于神经网络的遥感图像变化检测方法。
24.与现有技术相比,本公开的有益效果是:
25.(1)本公开所述方案提供了一种基于神经网络的遥感图像变化检测方法及系统,所述方案基于提出的跳跃注意力计算方式,能够有效提升检测结果的精度,可为相关需求提供新的解决方法,大幅度提高城市变迁评估或灾后受损评估等管理工作的准确率和效率;
26.(2)本公开所述方案模仿人类在两个图像之间查找差异的动作来重新设计自注意模块中q、k、v的计算方式,有效加强了transformer在双时相图像中提取特征的能力,所述方案中,每个时相的图像在编码器中对应有两个通道,一个使用transformer来关注全局信息,另一个将图像分割成一组不重叠的图像块,然后利用transformer捕获两图像相同区域的特征信息,通过双通道提取的两空间上的特征信息既能保留transformer在长距离特征提取上的优势,又能提高进一步提高细节特征的提取能力。
27.(3)为了进一步提高模型解码的能力,所述方案在u-net解码器的基础上设计了一个带有mlp(multilayer perceptron)层的渐进式解码器,进一步提高了模型的检测精度。
28.本公开附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
附图说明
29.构成本公开的一部分的说明书附图用来提供对本公开的进一步理解,本公开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。
30.图1为本公开实施例中所述的方案整体实现流程图;
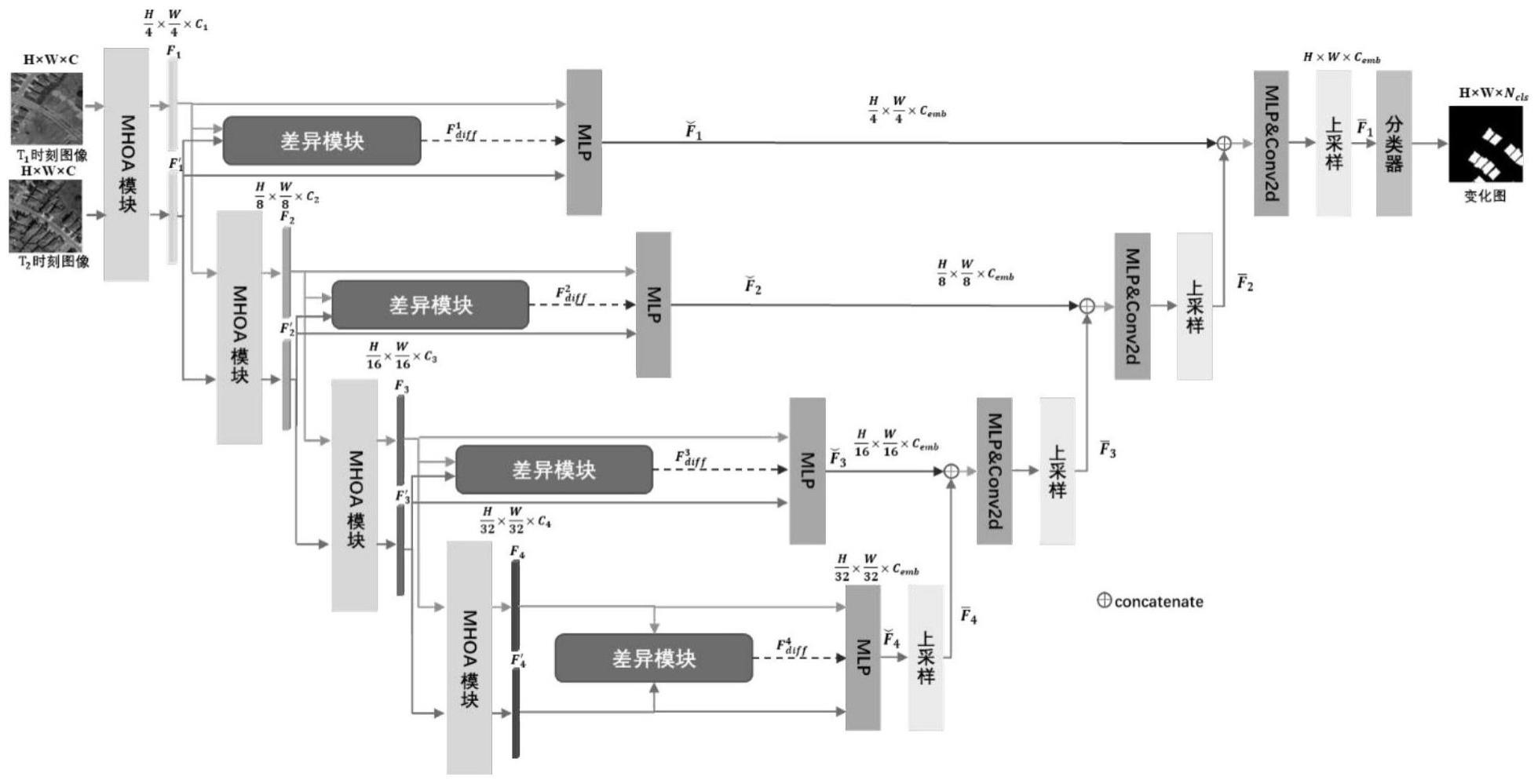
31.图2为本公开实施例中所述的基于神经网络的遥感图像变化检测方法的整体网络结构示意图;
32.图3为本公开实施例中所述的双通道特征提取结构示意图;
33.图4为本公开实施例中所述的图像块空间跳跃注意力机制示意图;
34.图5为本公开实施例中所述的跳跃注意力模块整体结构示意图;
35.图6为本公开实施例中所述的levir-cd数据集对比试验示意图;
36.图7为本公开实施例中所述的dsifn-cd数据集对比试验示意图;
37.图8为本公开实施例中所述的网络结构消融实验结果图。
具体实施方式
38.下面结合附图与实施例对本公开做进一步说明。
39.应该指出,以下详细说明都是例示性的,旨在对本公开提供进一步的说明。除非另
有指明,本文使用的所有技术和科学术语具有与本公开所属技术领域的普通技术人员通常理解的相同含义。
40.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
41.在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。
42.实施例一:
43.本实施例的目的是提供一种基于神经网络的遥感图像变化检测方法。
44.背景技术中存在的缺点主要是变化检测任务本身的特性造成的,具体包括:(1)建筑物的变化检测任务需要根据两张图片之间的差异来识别变化区域,并只关注建筑物的变化情况。因此,其他地面对象的变化会影响建筑物变化检测任务的性能。(2)模型需要提取全局和局部的细微特征,但是在这个过程中容易忽略较小建筑物的特征,这直接影响检测精度。(3)人类在两幅图像中找不同时会有目的地在相同位置查找不同,这一高效的方法在当前的变化检测方法中没有体现。(4)目前方法是从双时相图像中分别提取特征信息,但我们发现同时提取双时相图像的特征可以更好的利用图像中的特征信息。
45.基于上述问题,本实施例提出了一种基于神经网络的遥感图像变化检测方法,包括:
46.获取不同时相的第一遥感图像和第二遥感图像;
47.采用基于多头跳跃注意力机制的transformer编码器,分别提取所述第一遥感图像和第二遥感图像在不同尺度下的全局空间特征和图像块空间特征,获得第一遥感图像融合特征和第二遥感图像融合特征;其中,所述多头跳跃注意力机制具体为:对于编码器的自注意力模块,其全局空间和图像块空间的跳跃注意力机制计算结果基于第一遥感图像和第二遥感图像之间的差异获得;
48.将不同尺度下的第一遥感图像融合特征和第二遥感图像融合特征进行融合后执行解码操作,获得多尺度特征图;
49.基于所述多尺度特征图,利用预设分类器获得变化图,实现遥感图像的变化检测。
50.在具体实施中,所述transformer编码器包括四个通道,所述第一遥感图像和第二遥感图像分别对应两个通道;对于每个遥感图像所对应的两个通道,其中,一个通道用于利用transformer编码器对第一遥感图像与第二遥感图像在全局空间的特征提取,另一个通道用于利用transformer编码器对第一遥感图像和第二遥感图像在图像块空间上的特征提取。
51.在具体实施中,所述图像块空间特征的提取,需将输入图像分割成若干不重叠的图像块,再将其馈送入基于多头跳跃注意力机制的transformer编码器。
52.在具体实施中,所述将不同尺度下的第一遥感图像融合特征和第二遥感图像融合特征进行融合,具体为:对于每一尺度,基于第一遥感图像融合特征和第二遥感图像融合特征计算两个图像的差异;将所述差异与第一遥感图像融合特征和第二遥感图像融合特征进行合并,获得初步融合特征;将各个尺度的初步融合特征按照尺度从小到大的顺序逐级合并,获得最终的融合特征。
53.为了便于理解,以下结合具体实例对本实施例所述方案进行详细说明:
54.在具体实施中,采用公共数据集levi r-cd以及dsi fn-cd数据集中的样本对本实施例所述方案进行说明,其中,两个数据集分别包含637对分辨率大小1024
×
1024和3988对分辨率大小512
×
512的图像,由于直接将原图输入网络检测速度太慢,所以为了减少每batch的计算量,将所有图像分割成分辨率大小为256
×
256的非重叠图像块。在模型训练过程中,将其按原样本分类情况分为训练集、验证集和测试集。
55.本实施例中将四通道的transformer结构融合到双时态孪生变化检测通道中,因为我们要保留transformer在长距离特征提取的优势,并弥补它提取细小特征能力不足的缺点,其网络整体结构如图2所示;该网络结构以双时相高分辨率图像作为输入,每一时相的图像分别送入两条通道;一个利用跳跃注意力transformer模块与另一时相的图像在全局空间上提取上下文语义信息,另一个首先将输入图像分割成多个不重叠的块,再将其馈送跳跃注意力transformer模块中与对应通道的另一时相图像进行特征提取,其中两个跳跃注意力transformer模块的计算方式不同。上述设计的主要原因在于:transformer在全局上下文语义提取上有很强的优势,而在局部特征提取中效果不如卷积操作;经实验证明,本实例的设计细节能够保留transformer的优点并提高精细特征的提取能力。
56.具体的,全局空间和图像块空间上特征提取及叠加的过程如图3所示,具体来说,输入图像对的分辨率为h
×w×
3,其中h和w为分别为输入图像的高和宽,通道维度为3。
57.(1)基于全局空间的特征提取:
58.输入图像首先被送入下采样层以调整图像大小,然后进入多头跳跃注意力(multi-head over-attention,mhoa)transformer编码器中进行全局空间的上下文语义提取。特征提取后输出的特征图分辨率大小为其中i∈{1,2,3,4},c
i 1
》ci,每一级的特征图输出作为下一级模块的输入,c表示图像的通道数channel。例如:原始图片是rgb图像因此c等于3。
59.(2)基于图像块空间的特征提取:
60.此通道只关注图像同一区域的变化。首先,对图像进行patch embedding处理,这个过程是为了将图像分成多个不重叠的小块。然后利用mhoa编码器在相应的块上建立语义关系,这样就获得了每一级图像块空间上的细节特征信息。该通道输出的特征图分辨率大小为小为其中其中,t是为了和基于全局空间提取的特征进行区分。图像块空间上特征提取的逻辑示意图如图4所示。
61.上述特征提取的关键结构是mhoa编码器模块,编码器中的跳跃注意力模块的结构如图5所示,其中,q1,k1,v1是根据t1时刻图像计算获得,q2,k2,v2根据t2时刻图像计算获得,其计算过程相同。该模块用于分别提取两时相图像的特征,与其他方法提取图像特征不同的是,其他方法仅在一时相中提取本时相的特征,这忽视了双时相图像中时间维度上的信息,因此我们同时利用双时相图像,在提取第一时刻特征的同时,结合第二时刻的相同位置的特征信息来提高第一时刻图像的特征提取能力,第二时刻图像特征提取的原理相同。该过程与人类在两幅图像中找不同的过程类似,实验结果表明,图5方法能够利用双时相图像中时间维度上的信息,图像特征的表达能力更强,能够很好的提高检测精度。
62.由于transformer具有更大的感受野,因此可以充分利用长时空的语义信息来生
成更丰富的特征表示。在基于全局的空间中,通道包含一个下采样层和序列缩减过程;在基于图像块的空间中,图像块经过序列缩减过程后直接发送到mhoa模块,不需要进行下采样操作。在mhoa中,输入特征被映射到三个高维空间,即query(q)、key(k)和value(v):
63.q
p
=t
p
wq64.k
p
=t
p
wk[0065]vp
=t
p
wv[0066]
其中,表示输入特征图像的向量展开,wq,wk,是三个可学习的线性映射层,d是输入通道的维度。本实例提出的基于全局空间和图像块空间的跳跃注意机制计算方法如下:
[0067]
全局空间:
[0068]
图像块空间:
[0069]
其中,q,k,分别表示query、key、value,p和表示前一时相(pre)或后一时相(post),若p表示pre则表示post,反之亦然。
⊙
表示哈达玛积,即矩阵相同位置相乘。在编码过程中,q,k,v具有相同的维度。图像块空间跳跃注意力机制示意图如图3所示。
[0070]
优选地,为了降低方程的计算复杂度,序列缩减过程如下所示:
[0071][0072][0073]
其中,s为待缩减的序列,reshape()、linear()分别表示张量变形操作和线性层操作。为了提高特征表达能力,r是缩减率,其为一个超参数,本实施例中使用的r=4。
[0074]
mhoa还包含了mlp层和norm layer,整个模块计算公式如下:
[0075][0076][0077]
其中,sr表示序列缩减过程,表示mhoa的融合特征输出,ln代表layer norm。
[0078]
然后将全局空间上和图像块空间上获得的特征图叠加。这样做的目的是关注局部细节特征的变化并利用transformer远距离上下文语义提取的优势。基于图像块空间提取的特征分辨率大小为其分辨大小与同一级基于全局空间提取的特征分辨大小不一致,因此需要对其进行上采样或下采样操作来调整尺寸才能和全局空间提取的特征尺寸一致,然后再进行叠加,使提取的特征信息更加丰富。
[0079]
提取到更丰富的语义信息后,将其馈送到差异模块计算差异,然后经过多尺度特征融合模块以减少计算过程中特征的丢失。对于差异模块:第i层的差异模块首先将第i层编码器提取的特征图f
ip
,p∈{pre,post}合并,然后将不同时域的特征映射到同一时域中,计算该尺度下的最佳距离度量,这个计算在训练过程中是可学习的。最后再将差异特征映射回原空间域中。整个模块的计算过程如下所示:
2080s gpu进行训练。初始学习率为0.0001,epoch数设置为200。训练模型的批量大小设置为8。网络使用训练权重衰减等于0.01且beta值等于(0.9,0.999)的adamw优化器来优化模型。transformer中mhoa头数为8个。本实例同时训练了其余七种变化检测网络模型,包括fc-ef(fully convolutional early fusion)、fc-siam-di、fc-siam-conc、changeformer、bit(binary neural networks)、snunet、dtcdscn(dual task constrained deep siamese convolutional network)。将这7种网络模型与本实例提出的网络模型相比较,在两个数据集上的效果以及评估参数值如图6和图7所示。
[0097]
如图6所示,其中,(a)t1时刻图像;(b)t2时刻图像;(c)标注图像;(d)fe-ef;(e)fc-siam-di;(f)fc-siam-conc;(g)changeformer;(h)bit;(i)snunet;(j)dtcdscn;(k)soat-unet(其对应本实施例所述方案);
[0098]
如图7所示,其中,(a)t1时刻图像;(b)t2时刻图像;(c)标注图像;(d)fe-ef;(e)fc-siam-di;(f)fc-siam-conc;(g)changeformer;(h)bit;(i)snunet;(j)dtcdscn;(k)soat-unet(其对应本实例所述方案);
[0099]
可以看出,bit、dtcdscn、snunet以及changeformer比fc-ef、fc-siam-di、fc-siam-conc这些基于cnn的模型取得了更好的结果,这得益于注意力机制能够提取长距离的语义信息。dtcdscn通过双重注意力模块得到了良好的结果;changeformer使用基于transformer的编码器,这是一种通过纯transformer编码器提取特征的有效尝试,但该模型只关注图像的长期时空相关性,而忽略了局部细节。由此可以看出,特征提取的精细程度直接影响到最终的检测结果。本实例提出的模型在levir-cd数据集中与效果最好的比较方法相比,f1、iou、准确率、召回率分别增加了0.6%、1.03%、0.84%,以及0.3%;在dsifn-cd数据集中与效果最好的模型相比,f1、iou、准确率、召回率分别提高了2.14%、3.53%、1.68%、2.58%。结果显示本实例方法(soat-unet)在变化检测精度方面优于其他方法,且对不同的数据集有更强的泛化能力。
[0100]
为了验证本实例提出的基于transformer的跳跃注意力编码器以及多尺度融合解码器的贡献,我们在levir-cd数据集上进行了消融实验。本部分设置了七组消融实验。结果如图8所示。第一组使用changeformer作为基础网络,使用多头自注意力(mhsa)模块提取全局空间中的特征信息。第二组将第一组的mhsa模块替换为多头跳跃注意力(mhoa)模块。第三组在图像块空间下使用mhoa作为编码器。第四组在第一组的基础上本实例提出的由mlp层组成的解码器(mffd)。第五组将第四组的mhsa编码器替换成全局空间上的mhoa编码器。第六组将第五组全局空间的mhoa编码器替换成图像块空间上的mhoa编码器。第七组将全局空间和图像块空间的mhoa编码器相结合,并利用mffd增强解码性能。实验结果结果如图8所示。通过对比第一组和第二组的结果,可以看出全局空间mhoa可以提高变化检测的效果。第三组提高了编码器提取较小建筑物特征的能力从而进一步提高了f1等参数指标。通过对比第四、五、六组与一、二、三的结果可以得出,mffd解码器可以在原来的基础上进一步提高模型检测性能。与
[0101]
在第五组的基础上,最后一组结合了全局和图像块空间上mhoa编码器的优势,进一步提高了精细特征的提取能力,并且在各项评价指标上都有明显的提升。f1,准确率,iou,召回率,oa分别增长1.48%、1.78%、2.63%、1.17%、0.9%。
[0102]
进一步的,在具体实施中,如图1所示,本实施例所述方案的具体实施包括如下步
骤:
[0103]
s1、对遥感图像和标注图像进行裁剪分割,将图像分割成不重叠的图像块,每个图像块的像素大小为256
×
256。
[0104]
s2、将预处理后的遥感图像以及标注图像分为训练集、验证集和测试集。
[0105]
s3、利用提出的跳跃注意力模块改进的transformer结构作为编码器,同时提取双时相图像在图像块空间上的特征和全局空间上的特征,然后结合改进的u-net解码器搭建变化检测网络模型。利用训练集训练所述的孪生跳跃注意力网络模型,共迭代200次;
[0106]
s4、训练中每次迭代后都使用s2中得到的验证集对训练模型进行评估,主要的评估标准为f1值的大小,迭代200次后保留f1值最高的权值文件;
[0107]
s5、将s2中得到的测试集图像作为输入图像,利用最终的检测模型对输入图像进行检测,得到建筑物变化情况的检测结果。
[0108]
实施例二:
[0109]
本实施例的目的是提供一种基于神经网络的遥感图像变化检测系统。
[0110]
一种基于神经网络的遥感图像变化检测方法,包括:
[0111]
数据获取单元,其用于分别获取不同时相的第一遥感图像和第二遥感图像;
[0112]
编码单元,其用于采用基于多头跳跃注意力机制的transformer编码器,分别提取所述第一遥感图像和第二遥感图像在不同尺度下的全局空间特征和图像块空间特征,获得第一遥感图像融合特征和第二遥感图像融合特征;其中,所述多头跳跃注意力机制具体为:对于编码器的自注意力模块,其全局空间和图像块空间的跳跃注意力机制计算结果基于第一遥感图像和第二遥感图像之间的差异获得;
[0113]
解码单元,其用于将不同尺度下的第一遥感图像融合特征和第二遥感图像融合特征进行融合后执行解码操作,获得多尺度特征图;
[0114]
检测单元,其用于基于所述多尺度特征图,利用预设分类器获得变化图,实现遥感图像的变化检测。
[0115]
进一步的,本实施例所述系统与实施例一中所述方法相对应,其技术细节在实施例一中已经进行了详细说明,故此处不再赘述。
[0116]
在更多实施例中,还提供:
[0117]
一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成实施例一中所述的方法。为了简洁,在此不再赘述。
[0118]
应理解,本实施例中,处理器可以是中央处理单元cpu,处理器还可以是其他通用处理器、数字信号处理器dsp、专用集成电路asic,现成可编程门阵列fpga或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
[0119]
存储器可以包括只读存储器和随机存取存储器,并向处理器提供指令和数据、存储器的一部分还可以包括非易失性随机存储器。例如,存储器还可以存储设备类型的信息。
[0120]
一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成实施例一中所述的方法。
[0121]
实施例一中的方法可以直接体现为硬件处理器执行完成,或者用处理器中的硬件
及软件模块组合执行完成。软件模块可以位于随机存储器、闪存、只读存储器、可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。为避免重复,这里不再详细描述。
[0122]
本领域普通技术人员可以意识到,结合本实施例描述的各示例的单元即算法步骤,能够以电子硬件或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本公开的范围。
[0123]
上述实施例提供的一种基于神经网络的遥感图像变化检测方法及系统可以实现,具有广阔的应用前景。
[0124]
以上所述仅为本公开的优选实施例而已,并不用于限制本公开,对于本领域的技术人员来说,本公开可以有各种更改和变化。凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。