技术特征:
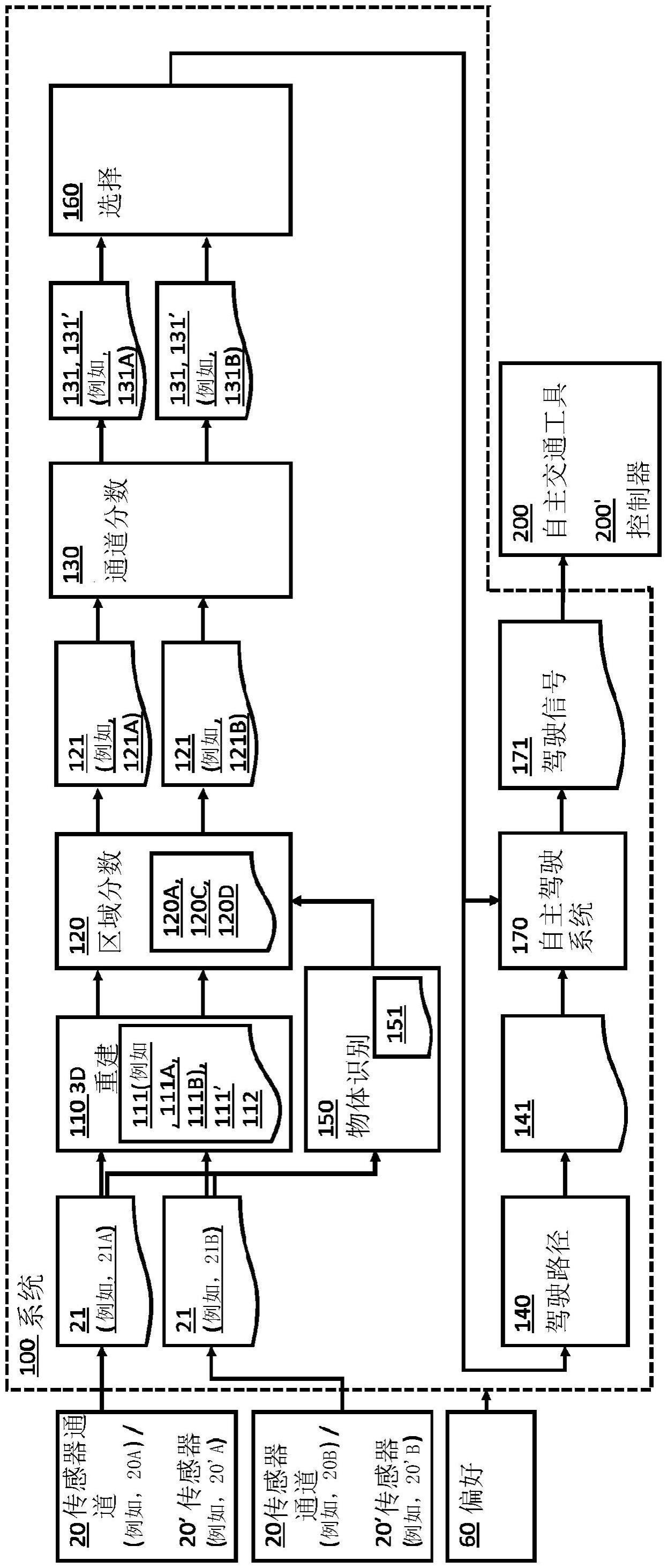
1.一种通过至少一个处理器引导交通工具的方法,所述方法包括:从与所述交通工具相关联的多个传感器通道接收传感器数据;对于每个传感器通道,基于所述传感器数据计算表示真实世界空间信息的三维重建数据元素即3d重建数据元素;对于每个传感器通道,基于所述3d重建数据元素计算通道分数;基于所述通道分数选择所述多个传感器通道中的传感器通道;基于选择的传感器通道的所述3d重建数据元素来引导所述交通工具。2.根据权利要求1所述的方法,其中迭代地完成选择传感器通道,其中每次迭代与特定时间帧有关,并且其中在每个时间帧中,基于在所述时间帧中所述选择的传感器通道的所述3d重建数据元素引导所述交通工具。3.根据权利要求1和2中任一项所述的方法,其中在每个时间帧:(a)相关的选择的传感器通道的所述3d重建数据元素以第一分辨率表示真实世界空间信息,以及(b)至少一个其他传感器通道的所述3d重建数据元素以第二较差分辨率表示真实世界空间信息。4.根据权利要求1所述的方法,其中引导所述交通工具包括:基于所述选择的传感器通道的所述3d重建数据元素计算驾驶路径;将所述驾驶路径发送到计算机化的自主驾驶系统,所述计算机化的自主驾驶系统适于控制所述交通工具的至少一种运动特性;以及基于所述计算的驾驶路径,由所述计算机化的自主驾驶系统引导所述交通工具。5.根据权利要求1-4中任一项所述的方法,其中所述至少一种运动特性选自以下各项组成的列表:速度、加速度、减速度、转向方向、取向、姿态和仰角。6.根据权利要求1所述的方法,其中所述3d重建数据元素选自深度图和点云组成的列表。7.根据权利要求1所述的方法,其中计算通道分数包括:将所述3d重建数据元素分割成区域;对于每个区域,计算区域分数;以及汇总所述区域分数以产生所述通道分数。8.根据权利要求1-7中任一项所述的方法,其中计算所述区域分数包括:接收相关性图,将相关性分数与所述3d重建数据元素的一个或更多个区域相关联;基于所述3d重建数据元素计算真实世界大小值,其中所述真实世界大小值表示在相关区域中表示的真实世界表面的大小;以及基于所述真实世界大小值和所述相关性图计算所述区域分数。9.根据权利要求1-8中任一项所述的方法,进一步包括针对所述3d重建数据元素的一个或更多个区域计算置信度值,并且其中计算特定区域的所述区域分数进一步基于相关区域的置信度值。10.根据权利要求1-8中任一项所述的方法,进一步包括:对所述传感器数据应用基于机器学习的物体识别算法即基于ml的物体识别算法,以识别至少一个真实世界物体;以及将所述至少一个真实世界物体关联到所述3d重建数据元素的一个或更多个区域,其中计算特定区域的所述区域分数进一步基于相关区域与所述至少一个真实世界物
体的关联。11.根据权利要求1所述的方法,其中从多个传感器通道接收传感器数据包括从多个传感器接收空间传感器数据,其中每个传感器与一个或更多个传感器通道相关联。12.一种用于引导交通工具的系统,所述系统包括:计算机化的自主驾驶系统,其适于控制所述交通工具的至少一种运动特性;非暂时性存储器装置,指令代码模块存储在所述非暂时性存储器装置中;至少一个处理器,其与所述存储器装置相关联并且被配置为执行所述指令代码模块,在执行所述指令代码模块时,所述至少一个处理器被配置为:从与所述交通工具相关联的多个传感器通道接收传感器数据;对于每个传感器通道,基于所述传感器数据计算表示真实世界空间信息的三维重建数据元素即3d重建数据元素;对于每个传感器通道,基于所述3d重建数据元素计算通道分数;基于所述通道分数,选择所述多个传感器通道中的传感器通道;以及基于选择的传感器通道的所述3d重建数据元素,由所述计算机化的自主驾驶系统引导所述交通工具。13.根据权利要求12所述的系统,其中所述至少一个处理器进一步被配置为迭代地选择传感器通道,其中每次迭代与特定时间帧有关,并且其中在每个时间帧中,基于在所述时间帧中所述选择的传感器通道的所述3d重建数据元素来引导所述交通工具。14.根据权利要求12和13中任一项所述的系统,其中在每个时间帧:(a)相关的选择的传感器通道的所述3d重建数据元素以第一分辨率表示真实世界空间信息,以及(b)至少一个其他传感器通道的所述3d重建数据元素以第二较差分辨率表示真实世界空间信息。15.根据权利要求12所述的方法,其中所述至少一个处理器进一步被配置为通过以下操作引导所述交通工具:基于所述选择的传感器通道的所述3d重建数据元素计算驾驶路径;将所述驾驶路径发送到计算机化的自主驾驶系统,所述计算机化的自主驾驶系统适于控制所述交通工具的至少一种运动特性;以及基于计算的驾驶路径,由所述计算机化的自主驾驶系统引导所述交通工具。16.一种用于通过至少一个处理器引导交通工具的方法,所述方法包括:从多个传感器通道接收空间数据;对于每个传感器通道:基于接收到的空间数据计算3d重建数据元素;将所述3d重建划分为区域;基于以下至少一项计算每个所述区域的区域分数:对应于所述区域的真实世界大小、所述区域的深度映射的清晰度以及所述区域与真实世界物体的关联;以及通过对所述区域分数执行加权求和来计算通道分数;基于所述通道分数选择所述多个传感器通道中的至少一个传感器通道;以及基于所述选择引导所述交通工具。17.根据权利要求16所述的方法,其中从多个传感器通道接收空间数据包括从多个传感器接收空间传感器数据,其中每个传感器与一个或更多个传感器通道相关联,并且其中
所述方法进一步包括:基于每个传感器各自通道的所述通道分数,针对一个或更多个单独的传感器计算质量分数;基于计算的质量分数选择至少一个传感器;以及基于选择的至少一个传感器的空间传感器数据引导所述交通工具。18.根据权利要求16和17中任一项所述的方法,其中选择传感器通道包括:对一个或更多个传感器质量分数应用适于补偿传感器伪影的偏置函数,以获得偏置的传感器质量分数;比较两个或更多个传感器质量分数和/或偏置的传感器质量分数;以及基于所述比较选择传感器通道。19.根据权利要求16所述的方法,进一步包括:基于所述通道分数计算选择的至少一个传感器通道的3d重建数据元素的加权平均;基于3d重建数据元素的所述加权平均计算驾驶路径;以及根据计算的驾驶路径引导所述交通工具。
技术总结
由至少一个处理器引导交通工具的系统和方法可以包括:从与交通工具相关联的多个传感器通道接收传感器数据;对于每个传感器通道,基于所述传感器数据计算表示真实世界空间信息的三维(3D)重建数据元素;对于每个传感器通道,基于3D重建数据元素计算通道分数;基于通道分数选择多个传感器通道中的传感器通道;以及基于选择的传感器通道的3D重建数据元素来引导交通工具。引导交通工具。引导交通工具。
技术研发人员:O
受保护的技术使用者:福飒特汽车有限公司
技术研发日:2021.08.18
技术公布日:2023/7/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。