基于改进的残差轻量网络的sar图像舰船尾迹参数估计方法
技术领域
1.本发明涉及深度学习技术领域,特别是一种基于改进的残差轻量网络的sar图像舰船尾迹参数估计方法。
背景技术:
2.舰船尾迹sar图像是通过sar对海面舰船运动产生的微弱信号进行探测和成像得到的图像。它可以显示舰船在海面上留下的尾迹痕迹,通过分析这些痕迹,可以得到舰船的轨迹、速度和航向等信息。
3.针对于sar图像尾迹包含的舰船参数的提取问题:董凯旋等人利用光学遥感图像的海面舰船尾迹特征以及相关参数,分别通过灰度累积法和radon变换法两种不同的尾迹长度检测方法,对尾流长度进行了提取,并利用尾流长度特征简单估测了舰船航速与航向;贾惠基于局部radon变换实现了线性尾迹的检测,然后从kelvin尾迹的产生机理出发,提出了舰船参数的二维估算方法,在基于markov过程滤除尾迹sar图像海面背景噪声的情况下,结合此方法着重研究了舰船参数的估算问题;舒服展开基于开尔文尾迹波长的航速估算方法,基于开尔文尾迹拟合提取波长,并进一步估算航速信息;范文娜等人针对舰船尾迹的全极化sar图像特征开展仿真,探究不同极化下sar图像中舰船尾迹特征的差异,进而结合基于尾迹的舰船速度反演方法,利用不同极化下的舰船尾迹sar图像开展舰船速度反演,分析海况、舰船运动速度和极化对反演结果的影响。
4.当前从尾迹中对于舰船航速、方向、舰船尺寸等参数的估算,多是基于尾迹形状与长度而进行,此类尾迹估算方法对尾迹长度的提取准确性有很高要求,适用局限性大。而采用卷积神经网络(cnn)的方法进行估计,对于不同的尾迹具有较强的自适应能力,且不需要对尾迹进行人工提取与拟合。
5.残差网络(resnet)是一系列深度残差神经网络,其中基于不同层数,resnet网络又包括resnet-18、resnet-50、resnet-101和resnet-152等模型,resnet网络由多个基本块组成,每个基本块包含两个卷积层和一个跳跃连接,跳跃连接将输入直接添加到块的输出中,形成了残差连接,这种连接可以让梯度直接反向传播到更浅层的网络中,从而避免了梯度消失问题。由于resnet-18模型深度较浅,因此其在计算效率和准确率之间取得了一个较好的平衡,是深度学习领域中的一个经典模型。
6.但是,舰船长尾迹需要网络关注的特征尺寸较大,而resnet网络相对感受野较小。resnet网络的基本模块是由两个3x3的卷积层组成,这样的设计导致每个基本模块的感受野只有3x3,而且resnet网络每一层的步幅都是1,没有采用池化层或步幅更大的卷积层等操作来增大感受野。虽然在此基础上,已有resnext、densenet、efficientnet等新网络模型的提出,但是它们仍然存在着一些问题,例如:参数数量多、可解释性较差、难以训练等问题。
技术实现要素:
7.本发明的目的在于提供一种基于改进的残差轻量网络的sar图像舰船尾迹参数估计方法。
8.实现发明目的的技术解决方案为:第一方面,本发明提供一种基于改进的残差轻量网络的sar图像舰船尾迹参数估计方法,步骤如下:
9.第一步:对海面舰船尾迹模型进行建模,将海面舰船尾迹分解为湍流尾迹、开尔文尾迹以及海面模型,然后将三者分别建模后再经过线性叠加得到总的海面舰船尾迹模型。
10.第二步:设定仿真雷达参数,利用弹跳射线法(sbr)实现sar图像快速成像,通过对不同的舰船参数进行仿真来实现构建数据集,并将数据集划分为一定比例的训练集与测试集,以sar图像作为训练样本的输入,以舰船尾迹的仿真参数作为训练标签,对每张sar图像标注对应的标签。
11.第三步:搭建改进的残差轻量网络,将训练样本与训练标签同时送入到网络中进行训练,然后将经过训练的网络用于检测未知sar样本的舰船参数,同时对估计结果进行精度与参数量的评估。
12.第二方面,本发明提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法的步骤。
13.第三方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面所述的方法的步骤。
14.与现有技术相比,本发明的有益效果为:
15.(1)本发明提出改进的残差轻量网络,该网络使用非局部运算增强全局特征感知,增加了网络的感受野,并引入cbam增强网络架构顶层特征学习能力,同时分解卷积核来减少网络参数量,这代表着该网络在不依靠堆叠深度的情况下,相比于主流网络具有一定的精度以及网络参数量优势;
16.(2)本发明将舰船尾迹sar图像作为训练样本来训练改进的残差轻量网络,经过训练的网络模型能够较好的估计未知的舰船尾迹sar图像中包含的舰船参数。
附图说明
17.图1是舰船湍流尾迹示意图。
18.图2是舰船开尔文尾迹示意图。
19.图3是舰船湍流尾迹、开尔文尾迹与海面线性叠加的海面尾迹示意图。
20.图4是sbr快速成像模拟的海面尾迹sar图像示意图。
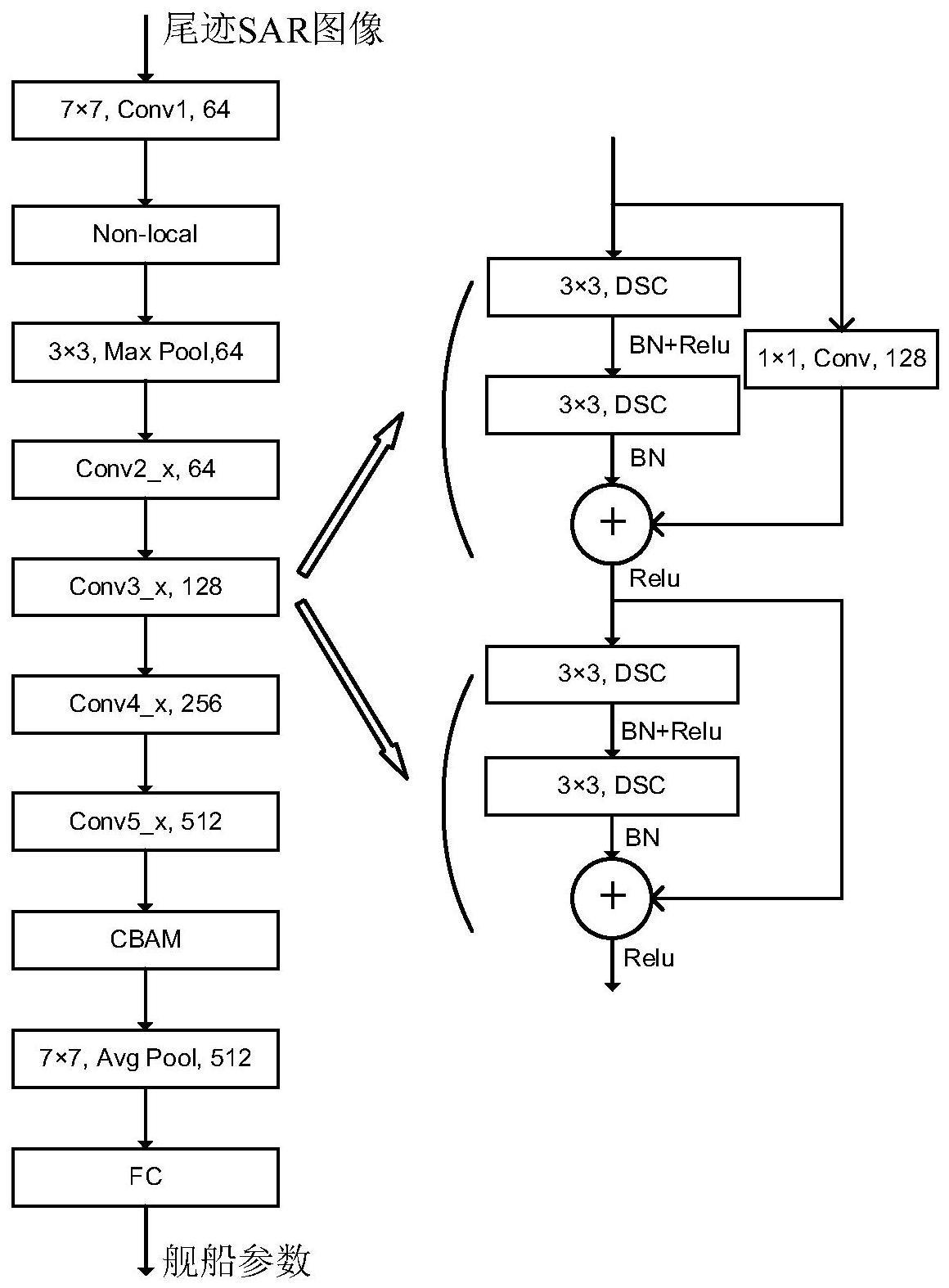
21.图5是改进的残差轻量网络示意图。
具体实施方式
22.一种基于改进的残差轻量网络的sar图像舰船尾迹参数估计方法,包括以下步骤:
23.步骤1:对海面舰船尾迹模型进行建模,将海面舰船尾迹分解为湍流尾迹、开尔文尾迹以及海面模型,然后将三者分别建模后再经过线性叠加得到总的海面舰船尾迹模型;
24.步骤2:设定仿真雷达参数,利用弹跳射线法实现sar图像快速成像,通过对不同的
舰船参数进行仿真来实现构建数据集,并将数据集划分为一定比例的训练集与测试集,以sar图像作为训练样本的输入,以舰船尾迹的仿真参数作为训练标签,对每张sar图像标注对应的标签;
25.步骤3:搭建改进的残差轻量网络,将训练样本与训练标签同时送入到网络中进行训练,然后将经过训练的网络用于检测未知sar样本的舰船参数,同时对估计结果进行精度与参数量的评估。
26.进一步的,步骤2中,所搭建的数据集以不同的舰船速度vs、舰船长度l、舰船宽度b以及舰船吃水深度d等舰船参数作为随机变量进行生成舰船尾迹sar图像。
27.进一步的,步骤3中,搭建改进的残差轻量网络,步骤如下:
28.对于输入的尾迹sar图像,首先选择通过7
×
7的大卷积核来提取底层的特征,该特征包括图像的轮廓、细节以及纹理等重要信息;在7
×
7卷积操作之后,引入非局部运算(non-local)来计算图像中特征不同位置的关联度,增强全局特征感知;然后通过3
×
3的最大池化,消除非极大值,降低底层的计算复杂度;此后经过4个conv_x层,每个包括四层3
×
3普通卷积层,输出通道数分别为64、128、256和512,将四层普通3
×
3卷积过程更新为3
×
3的逐通道卷积过程与1
×
1的逐点卷积过程,使网络参数量下降;随后通过卷积块注意模块(cbam)来增强网络顶层相关特征提取能力,此后经过平均池化输出512通道数的1
×
1尺寸特征;最后将其通过一个全连接层fc直接输出舰船参数。
29.所述非局部运算过程的细节如下:
30.假设输入sar图像特征任意位置处的索引序号为i,对特征进行处理,根据下列关系重新定义i处的特征
[0031][0032]
其中,xi是i处的输入特征,xj表示j处的输入特征,yi是i处的输出特征,把一元函数g(
·
)当作一种线性转化,则有
[0033]
g(xj)=wgxj[0034]
其中,wg是待学习的权重矩阵,可以通过空间域的1
×
1卷积实现,函数f(
·
,
·
)是衡量i与j处的相似度函数,表示形式为
[0035][0036]
相应的,归一化因子可以表示为
[0037][0038]
下面结合附图和实施例对详细步骤进行说明。
[0039]
实施例
[0040]
首先建立舰船湍流尾迹模型,在舰船行驶路径之后距离尾迹x距离处,湍流尾迹的宽度w(x)为
[0041][0042]
其中,l为舰船长度,b为舰船宽度,a≈5。
[0043]
湍流高度s(k)衰减模型为
[0044][0045]
其中,k为能量谱对应的波数,vs为船速,l
′
为速度积分长度,e(k)=ξ
2/3
k-5/3
,ξ=9.0
×
10-6
,y为垂直于船身方向的位置。
[0046]
湍流尾迹建模结果参考图1所示。
[0047]
然后建立舰船开尔文尾迹模型,在舰船行驶路径之后距离尾迹x距离处,湍流尾迹的宽度w(x)为
[0048][0049]
其中,为尾迹波浪高度,re表示取实部,θ为波传播方向相对于x轴的夹角,为尾迹波浪高度,re表示取实部,θ为波传播方向相对于x轴的夹角,为相位系数,是传播方向波分量的波数,a(θ)为舰船自由波谱,a(θ)满足
[0050][0051][0052]
其中,h(k,θ)为kochin函数,sh为舰船表面,z为吃水深度,水流强度σ(x,y,z)可以表示为
[0053][0054]
其中,f是舰船的船体特征方程
[0055][0056]
其中,d为侧壁吃水深度。
[0057]
开尔文尾迹建模结果参考图2所示。
[0058]
然后对海面进行建模,pm海谱模型是一种简洁而广泛应用的仿真海面模型,其中,主波浪方向海浪功率谱模型公式如下
[0059][0060]
式中,a=8.10
×
10-3
,b=0.74,k
x
、ky为海浪的空间波数,u
19.5
为海面上空19.5m处的风速,g0为重力加速度。
[0061]
假设由二维离散点表示的pm海面的x与y方向上的长度分别为l
x
和ly,离散点数分别为m和n,相邻两点之间的距离为δx和δy,其中上述参量满足l
x
=mδx,ly=nδy,则pm海面任意一点(m,n)处的海面高度为
[0062][0063]
mk,nk为矩阵单元序列,则
[0064][0065][0066]
其中n1,n2为服从正态分布n(0,1)的随机数矩阵。为了使海面高度f(xm,yn)为实数,应满足
[0067][0068]
图3给出了湍流尾迹、开尔文尾迹与海面合并模型的结果示意图。
[0069]
然后,采用sbr快速成像算法对合并模型进行sar图像模拟,成像公式为
[0070][0071]
其中,k为波数,k
x
与kz分别为x、z方向的波数分量,e0为入射波的幅度,j为虚数单位,r为观察点距离,为θ或极化的远场回波。
[0072]
图4是海面舰船尾迹sar图像示意图。
[0073]
通过对不同的舰船参数进行仿真来实现构建sar数据集,并将数据集划分为一定比例的训练集与测试集。
[0074]
以sar图像作为训练样本的输入,以舰船尾迹的仿真参数作为训练标签,对每张sar图像标注对应的标签,将训练样本与训练标签同时送入到网络中进行训练。
[0075]
搭建改进的残差轻量网络,以resnet-18为基础,对于输入的尾迹sar图像,首先选择通过7
×
7的大卷积核来提取底层的特征,该特征包括图像的轮廓、细节以及纹理等重要信息;
[0076]
在7
×
7卷积操作之后,引入非局部运算(non-local)来计算图像中特征不同位置的关联度,增强全局特征感知。详细过程如下,假设输入sar图像特征任意位置处的索引序号为i,对特征进行处理,根据下列关系重新定义i处的特征
[0077][0078]
其中,xi是i处的输入特征,xj表示j处的输入特征,yi是i处的输出特征,把一元函数g(
·
)当作一种线性转化,则有
[0079]
g(xj)=wgxj[0080]
其中,wg是待学习的权重矩阵,可以通过空间域的1
×
1卷积实现,函数f(
·
,
·
)是衡量i与j处的相似度函数,表示形式为
40g;
[0099]
软件配置:操作系统windows10,基于深度学习架构python3.9 pytorch1.12 cuda11.7环境的pycharm开发软件。
[0100]
(2)训练结果与分析:
[0101]
根据舰船尾迹建模公式,舰船尾迹的形状与舰船长度l、舰船宽度b、吃水深度d、舰船运动速度vs四个舰船参数有关。
[0102]
首先建立舰船尾迹sar图像数据集,对于数据集的仿真过程,以四个舰船参数为变量,利用不同参数导致的sar图像中尾迹的差异,计算不同参数下的尾迹模型。然后利用sbr快速成像算法,在雷达中心频率10ghz,方位角为0
°
,俯仰角θ为80
°
,vv极化,方位向与距离向各采样300个点的仿真条件下,按照表1的参数采样范围进行二维sar图像仿真。将舰船四个参数按照表中给出的仿真范围内取随机数,总共计算4800张随机sar尾迹图像。
[0103]
表1 四个舰船参数仿真范围表
[0104][0105]
实验中,首先将4800张图片按9:1的比例间隔随机划分为训练集与验证集,裁剪为224
×
224的尺寸,使用adam作为梯度优化器,batch size设置为16,初始学习率设置为0.0001,训练200轮,然后学习率衰减为原始的十分之一,训练100轮,总共训练300轮,fc的随机丢弃率drop out设置为0.25。
[0106]
本次实验rrmse误差结果是指在总共300轮训练中的每轮训练结束后,使用每轮训练完的网络模型对随机划分的480张验证集尾迹sar图像进行四个参数的估计,并统计每轮估计的四个参数的rrmse平均值,从而在总的300轮中选出rrmse最小的最优结果,代表着网络的最优训练结果。
[0107]
对网络各部分进行消融实验,以网络参数量以及网络对四个待估计的舰船参数的rrmse作为评价指标。汇总起来,得到表2中的对比结果,其中rrmse
vs
、rrmse
l
、rrmseb、rrmsed分别代表vs、l、b、d四个参数的rrmse,其越小则代表估计精度越高,ours代表最终的改进的残差轻量网络。
[0108]
表2 不同网络下训练结果分布表
[0109][0110]
本发明的网络训练结果的rrmse与原始的resnet-18进行比较,在网络参数量降低为原先的1/7的情况下,本文网络对于vs、l、b、d四个参数的rrmse分别降低了3.91%、0.55%、0.51%和0.31%,以较小网络参数量实现了更优的舰船参数估计效果。
[0111]
在相同的网络训练条件下,将本节中提出的网络ours与近年主流cnn网络进行对比,同样记录300轮训练的rrmse平均最优结果,得到表3。
[0112]
表3 各主流的cnn模型对比结果分布表
[0113][0114][0115]
对比证明所提出的改进的残差轻量网络在针对尾迹sar舰船参数估计方面具有更高的精度与较少的网络参数量的优势。
[0116]
以上所述的仅是本发明专利的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明专利创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明专利的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。