1.本发明涉及一种用于测试电梯提升机制动器的方法以及一种用于实施该方法的系统。总的来说,本发明涉及确保提升机制动器的足够的制动力。
背景技术:
2.电梯具有机电提升机制动器作为安全装置,以向电梯提升机的牵引绳轮或旋转轴施加制动力。通常有至少两个独立的制动单元,例如两个、三个或四个单元。它们的尺寸应能使超载的电梯轿厢停止并保持静止。如果一个制动单元发生故障,出于安全原因,其余的制动单元仍应停止并以适当的安全裕度保持电梯轿厢。
3.由于其作为电梯安全装置的特性,应确认提升机制动器的操作状况。
4.ep 1915311 b1中公开了一种确认方法。根据该方法,在电梯运行结束时,仅接合电梯提升机的一个保持制动器,并且移除电机扭矩。如果牵引绳轮由于重力作用开始移动,则认为保持制动器有故障。
5.需要改进测试方法,以在制动器的整个工作范围内对其进行精确测试。
技术实现要素:
6.本发明的目的是介绍一种方法,该方法能够通过使用具有提高的精度的测试负载来充分测试制动效果,尤其是电梯提升机制动器的制动扭矩。
7.有利的是,通过用电梯提升机的辅助电机扭矩补充由电梯不平衡引起的负载来建立测试负载。
8.辅助电机扭矩包括被选择用来补偿现实生活中电梯系统的不理想性的部件。因此,辅助电机扭矩提供了提升机制动器的精确测试。
9.目的是引入一种解决方案,通过该方案可以解决现有技术的一个或多个上述问题和/或说明书中其他地方讨论或暗示的缺点。目的尤其是引入一种解决方案,通过该解决方案,可以准确而简单地提供提升机制动器的测试。
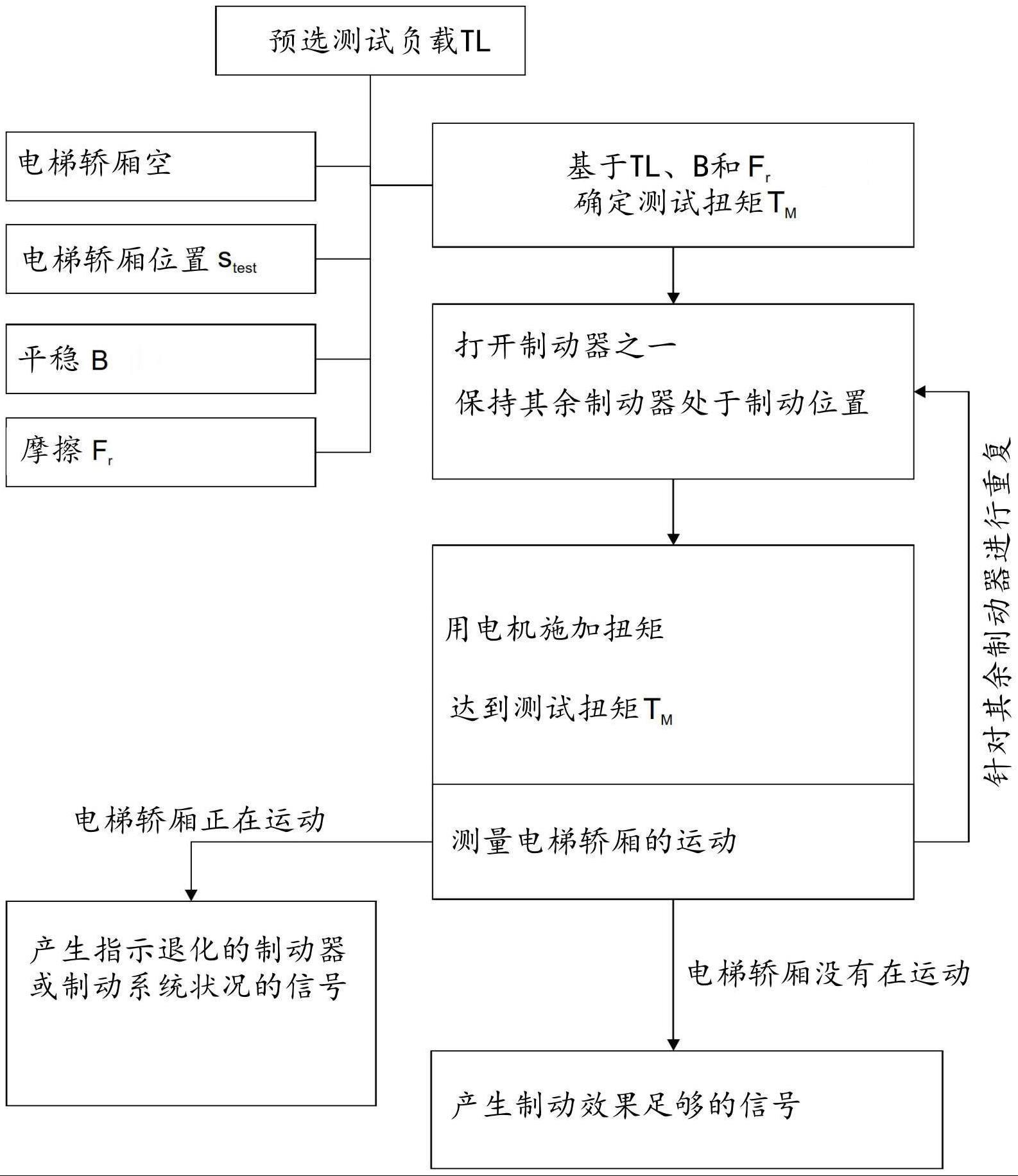
10.提出了一种用预选测试负载tl测试电梯提升机制动器的新方法,该方法包括:
[0011]-确认位于测试位置stest的空电梯轿厢,
[0012]-获得电梯平衡b的信息,
[0013]-获得电梯在测试位置stest处的摩擦fr的信息,
[0014]-基于所述测试负载tl、平衡b和摩擦fr来确定提升电机的所需测试扭矩tm(辅助电机扭矩),
[0015]-打开提升机制动器之一,同时保持其余制动器接合在制动位置,
[0016]-用电梯提升机的电动机施加至多达到所需测试扭矩tm的扭矩,
[0017]-测量电梯轿厢的运动,以及
[0018]-在检测到电梯轿厢的运动时,产生指示一个或多个提升机制动器的退化状况的信号。
[0019]
该方法的优选的进一步细节在下文中介绍。
[0020]
根据一些实施例,通过保持每个提升机制动器打开,同时保持其余制动器接合在制动位置,对每个提升机制动器重复该方法。
[0021]
根据一些实施例,测试负载tl对应于预选过载,该预选过载由因子ol表示如下:tl=ol*n,其中n是电梯轿厢的额定负载n,并且ol优选地从101%...130%的范围中选择,更优选105%...120%,最优选ol=110%。
[0022]
优选地,电梯包括:
[0023]
电梯轿厢、配重和可移动地布置在井道内的电梯绳索,其中电梯轿厢和配重至少部分地由电梯绳索支撑;和
[0024]
提升机,包括:
[0025]
电机和连接到电机的牵引绳轮,用于经由电梯绳索移动电梯轿厢和配重;和
[0026]
至少两个制动器,布置成当电梯停止时停止并防止电梯轿厢移动。
[0027]
根据一些实施例,测量电梯轿厢的运动是通过测量电梯提升机的旋转来实现的,优选地测量电机或连接到电机并支撑用于移动电梯轿厢的电梯绳索的牵引绳轮的运动。驱动单元的电梯轿厢的运动信息可以从连接到电机的旋转传感器或分解器获得,或者从连接到电梯轿厢或位于井道中的定位装置获得。
[0028]
优选地,提升机电机是同步永磁电机。
[0029]
还提出了一种用于实施本发明方法的新系统。该系统可以是电梯驱动单元的一部分或者单独提供。该系统可以在电梯驱动单元的硬件和/或软件模块中和/或在电梯维护或安装工具中实现,以安装或维修电梯。
[0030]
根据一个实施例,电梯驱动单元包括电梯提升电机,优选为同步永磁电机,以及配置成驱动电机的变频器。
[0031]
根据一些实施例,该系统具有用于馈送到电机的电机电流的输入和用于轿厢位置的输入,这些输入可连接到电梯驱动单元。
附图说明
[0032]
在下文中,将通过示例并参考附图更详细地描述本发明,其中:
[0033]
图1示意性地示出了包括至少两个制动器的电梯系统的实施例,
[0034]
图2显示了优选方法的示例,以及
[0035]
图3示出了同步永磁电机中电机电流和电机扭矩之间基本恒定的关系。
具体实施方式
[0036]
图1示出了电梯100,其具有可移动地设置在井道1内的电梯轿厢2和配重3。电梯轿厢2和配重3至少部分地借助于电梯绳索4来支撑。电梯轿厢2和配重3由提升机10的电机5驱动。除了电机之外,提升机包括牵引绳轮6,该牵引绳轮连接到电机,用于经由电梯绳索移动电梯轿厢和配重。提升机10包括至少两个制动器7、7’,例如两个、三个或四个制动器7、7’,它们布置成在电梯停止时停止并防止电梯轿厢移动。
[0037]
牵引绳轮6可以集成到电机5或者以合适的方式连接到电机5。优选地,电机5是同步永磁电机。优选地,制动器7、7’是电磁制动器,其布置成例如将制动靴压靠在连接到牵引
绳轮6或与牵引绳轮分离的制动表面上。
[0038]
如图1所示,可以用驱动单元15来控制电机的运动。如图1所示,用于测试制动效果充分性的制动控制系统可以在电梯驱动单元15的硬件和/或软件模块16中实现,并且可选地在电梯维护或安装工具17中实现。优选地,该系统具有用于馈送到电机5的电机电流的输入和用于轿厢2位置的输入,这些输入可连接到电梯驱动单元15。
[0039]
如图2所示,提供了一种用预选测试负载tl测试提升机10制动器7.7’的方法。用于实施测试制动效果充分性的方法的系统可以是电梯驱动单元15的一部分,或者单独提供,并且可以是图1的电梯系统100的一部分。
[0040]
测试负载tl可以根据特定电梯设施中的环境来选择。优选地,测试负载tl对应于预选过载,该预选过载由因子ol表示。优选地,过载被选择为ol=110%,即负载比电梯轿厢的额定负载n高10%:
[0041]
tl=ol*n,优选地tl=110%*n
ꢀꢀ
(1)
[0042]
该方法包括确认空电梯轿厢2位于测试位置stest,例如位于电梯井1中的最低或最高楼层。
[0043]
该方法还包括在测试位置stest收集电梯的电梯平衡b和摩擦fr的信息。
[0044]
平衡b可以是登记在电梯控制系统中的参数。平衡b也可以被检查,例如从wo 2014135408 a1中的等式(5)被称为平衡重量mb。在所述等式mb=[(p
me,mid,up-p
me,mid,dn
)/2*g*v
nom
]中,mb代表以千克为单位的平衡重量差,v
nom
代表电梯的标称速度,g代表重力加速度9.81m/s2。根据该等式,在恒速运行期间,通过确定上下方向铜损耗被去除的电机电流,并将该差值除以标称速度和g,获得井道中间位置的平衡。
[0045]
平衡检查确定电梯的平衡重量差。平衡重量差是空电梯轿厢2的重量和电梯配重3的重量之间的差。此外,平衡b可以是标称平衡bn,或者除了标称平衡bn之外,它还可以包含位置相关的非补偿项u:
[0046]
b=bn u
ꢀꢀ
(2)
[0047]
非补偿是由运动部件,例如电梯的悬吊绳索、提升绳索或补偿绳索引起的位置相关补偿误差。可以认为它作为电梯轿厢位置s的函数而线性变化,使得例如在电梯井道1的中间达到标称平衡bn。通常,该测试方法可以在任何楼层或测试位置实施,但是如果该方法在电梯井中的顶部和/或顶层实施,则不需要补偿。
[0048]
摩擦fr可以通过在测试位置stest非常缓慢地上下移动电梯轿厢2并测量两个方向上的电机驱动电流来测量。由竖井摩擦力(电梯井中运动部件的摩擦力)产生的力/电流由(向上的电流-向下的电流)/2计算。
[0049]
由于已经确定了前述分力,电梯提升电机5的测试扭矩tm,换句话说,辅助测试扭矩,基于所述分力tl、b和fr来确定:
[0050]
tm
→
(ol-b)*n fr
ꢀꢀ
(3)
[0051]
在上面的等式3中,平衡b表示为标称负载n的百分比。
[0052]
通过一次打开一个制动器,同时保持其余制动器接合,即处于它们的制动位置,来测试提升机制动器7、7
′
。然后施加扭矩,例如利用电梯提升机10的电动机5使扭矩上升至多达到所需测试扭矩tm,同时观察提升机10的运动状态,例如观察牵引绳轮6的运动。如果观察到提升机10的旋转,则产生指示制动器或制动系统的操作异常的信号。这种指示(优选地
具有对例如以下至少一项的更精确的情况分析:失效的制动器组合;统计信息,哪些扭矩值导致旋转等)可以被传送给例如服务技术人员、远程监控中心和/或云网络,用于诊断制动问题和安排维护。
[0053]
优选地,如下所述,确定对应于所需测试扭矩tm的电机电流im。所有提升机制动器7、7’被打开,提升电机5被激活,并且记录在制动器打开的情况下保持电梯轿厢2静止所需的电机电流ig。然后,可以根据电流ig、测试负载tl、平衡b和摩擦fr确定所需的测试电流im,如下所示:
[0054]im
→
ig*[(ol-b)*n/(b*n-fr)-1]
ꢀꢀ
(4)
[0055]
当电机电流和电机扭矩之间存在线性关系时,可以使用该等式。尤其是当提升电机是同步永磁电机时,情况更是如此。图3示出了与同步永磁电机相关的例子,其中所述线性关系由电机电流i和电机扭矩t之间的参数k表示,即电机电流的变化δi将引起电机输出扭矩的变化δt。可选地,电流与扭矩的比率可以由驱动器学习。
[0056]
那么至多达到电机电流im的电流i被提供给提升电机5的绕组,以产生所需的辅助测试扭矩tm;此后,对于提升机10的其他制动器,测试程序以与上面针对公开的相同方式继续。
[0057]
根据第一示例,该方法在以下情况下实现:
[0058]-额定负载n=1000千克,过载因子ol=110%
[0059]-》预选测试负载tl=1100千克
[0060]-平衡b=50%
[0061]-电梯轿厢2是空的
[0062]-测试位置测试s
test
中无补偿误差u
[0063]-井道摩擦fr=0
[0064]-参数k=常数。
[0065]
待验证的制动测试负载为:110%x1000千克-50%x1000千克=600千克。如果一个制动器组7、7’出现故障,其余制动器组应能够保持和减速110%的负载。驱动单元15测量当制动器未接合时保持轿厢2静止所需的电流ig。这个电流ig代表保持500kg静止的力。然后,一个制动器组保持打开,其他制动器组关闭。驱动单元15将电机的电流增加0.1
×
1g,这对应于所需的测试力。
[0066]
代表600千克负载的所需测试力《》im=1.2 x ig
[0067]
所需的电机辅助力=600千克-500千克=100千克《》0,2 x ig
[0068]im
→
ig*[(ol-b)*n/(b*n-fr)-1]《-》ig*[(110-50)*1000/(0,5*1000)-1]=ig*0,2
[0069]
如果在施加测试扭矩时检测到电机牵引绳轮6上没有运动,则测试通过。其余的制动器组组合按照相同的程序进行测试。
[0070]
根据第二示例,该方法在以下情况下实现:
[0071]-额定负载n=1000千克,过载因子ol=110%
[0072]-》预选测试负载tl=1100千克
[0073]-平衡b=40%
[0074]-电梯轿厢2是空的
[0075]-测试位置测试s
test
中无补偿误差u
[0076]-井道摩擦fr=10kg
[0077]-参数k=常数
[0078]
待验证的制动测试负载为:110%x1000千克-40%x1000千克=700千克。如果一个制动器组7、7’出现故障,其余制动器组应能够保持和减速110%的负载。驱动单元15测量当制动器未接合时保持轿厢2静止所需的电流ig。这个电流ig代表保持400千克静止的力减去10千克摩擦力fr。然后,一个制动器组保持打开,其他制动器组关闭。驱动单元15将电机的电流增加0.41
×
1g,这对应于所需的测试力。
[0079]
代表700千克负载的所需测试力《》im=1.79 x ig
[0080]
所需的电机辅助力=700千克-390千克=310千克《》0,79 x ig
[0081]im
→
ig*[(ol-b)*n/(b*n-fr)-1]《-》ig*[(110-40)*1000/(0,4*1000-10)-1]=ig*0,79
[0082]
如果在施加测试扭矩时检测到电梯轿厢没有运动,则测试通过。其余的制动器组组合按照相同的程序进行测试。
[0083]
在该申请中,已经优选地给出了该布置的几个细节。这意味着它们是优选的,然而它们不应被理解为是必需的,因为没有它们也可以实现该布置。
[0084]
应当理解,以上描述和附图仅旨在说明本发明。对于本领域技术人员来说,显然可以在不脱离本发明范围的情况下对本发明进行变化和修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。