技术特征:
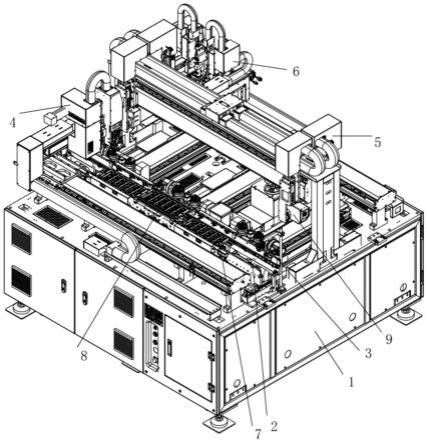
1.一种点胶装置,其特征在于,所述装置包括:底座、输送轨道模组、搬运手模组、点胶平台模组、aoi模组和点胶臂模组,所述底座设置于其他模组下方;所述输送轨道模组设置于点胶装置的前端,与所述搬运手模组连接设置,所述输送轨道模组作用为运输所述tray盘到所述搬运手模组中;所述搬运手模组设置于点胶平台模组上方,并且与所述aoi模组间隔设置,用于搬运所述输送轨道模组传送的物料;所述点胶平台模组设置于点胶装置中段部位,与输送轨道模组相邻设置,用于点胶平台模组上的物料进行点胶;所述aoi模组设置于所述点胶平台模组上方,用于对所述物料进行定位与点胶完成后的物料的检测;所述模组之间通过电连接。2.根据权利要求1所述的一种点胶装置,其特征在于,所述输送轨道模组、搬运手模组、点胶平台模组、aoi模组和点胶臂模组中均设置有运输导轨,所述搬运手模组、aoi模组和点胶臂模组均设有支撑架,将所述搬运手模组、aoi模组和点胶臂模组设置在点胶装置上方。3.根据权利要求1所述的一种点胶装置,其特征在于,在所述输送轨道模组包括若干个tray盘和tray盘单位升降装置,在所述tray盘中包含ngtray盘,所述ngtray盘用于放置点胶不合格的物料,在所述运输轨道模组前端的弹夹投料口设置有tray盘扫码头。4.根据权利要求1所述的一种点胶装置,其特征在于,所述搬运手模组包括:搬运机械手、机械手吸附头和搬运机械手校正仪,所述机械手吸附头设置于搬运机械手中,所述搬运机械手校正仪用于再搬运完一个周期物料后对搬运机械手进行校正。5.根据权利要求1所述的一种点胶装置,其特征在于,在所述点胶平台模组包括若干个点胶平台,所述点胶平台中包括若干个物料放置台和点胶针测高台,所述点胶测高台的高度与物料放置在物料放置台的高度一致,点胶针头在开始点胶前会经过点胶测高台对点胶高度进行测试。6.根据权利要求1所述的一种点胶装置,其特征在于,所述aoi模组包括若干个3d线扫激光定位仪和若干个2d定位检测仪,所述3d线扫激光定位仪和所述2d定位检测仪设置于aoi模组前后两端,所述3d线扫激光定位仪用于扫描物料的多个外轮廓面,组成三维点云图来形成物料的3d外形,所述2d定位检测仪用于拍摄物料表面位置,获取物料表面位置清晰的图像,所述aoi模组用于对所述物料先经过所述3d线扫激光定位仪通过激光线扫对整个物料进行定位并物料进行检测,再通过所述2d定位检测仪进行辅助定位和检测。7.根据权利要求1所述的一种点胶装置,其特征在于,所述点胶臂模组包括:点胶机械臂、若干个点胶针头和点胶针头矫正模块,所述点胶针头设置在所述点胶机械臂上,用于给所述点胶平台上的物料进行点胶,所述点胶针头矫正模块包括:点胶针头校正仪、擦胶装置和称重天平。8.根据权利要求1至7中任一所述一种点胶装置,其特征在于,所述输送轨道模组、搬运手模组、点胶平台模组、aoi模组和点胶臂模组均通过点连接与控制模块连接,并通过控制模块对所述输送轨道模组、搬运手模组、点胶平台模组、aoi模组和点胶臂模组进行控制,所述点胶装置通过所述控制模块设置系数对其及进行控制。
技术总结
本发明提出一种点胶装置,所述点胶装置包括:底座、输送轨道模组、上料模组、搬运手模组、点胶平台模组、AOI模组、点胶臂模组和下料模组。所示点胶装置的流程为:将物料放置于输送轨道模组中通过导轨运输至上料模组中,通过搬运手模组将所述物料运送至点胶平台模组中,并通过AOI模组对物料进行定位和检测,再到点胶臂模组位置进行点胶,点胶完成后再经过AOI模组进行检测,最后通过导轨运送至下料模组完成点胶,通过膜组间的配合和结合间的设置,大大提高了空间的利用率,并且通过多次AOI模组的定位和检测,大大提高了物料点胶的成功率,节省了成本。省了成本。省了成本。
技术研发人员:李志强 骆小刚 林苏
受保护的技术使用者:广州市景泰科技有限公司
技术研发日:2022.09.05
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。