1.本实用新型涉及无人机技术领域,尤其涉及一种无人机机巢。
背景技术:
2.无人机技术日趋成熟,人工智能技术不断发展,电力行业已经开始使用无人机大面积巡查电力线路,无人机已成为巡检人员高效安全完成巡检作业的最佳工具。电网无人机巡检目前主要应用在输配电线路的杆塔精细化巡检、通道巡检、树障巡检,以及巡检变电站高层设备的外观缺陷、异物、全站夜间红外测温等,帮助电力巡检人员完成日常巡检、通道巡视、缺陷复查、工程验收、外破监控、故障巡视、应急巡视等作业。
3.目前,无人机机巢的应用使得无人化、自主化、智能化、全流程一体化的低空巡检服务得以产生。但是现有的无人机机巢接收无人机后,由于外界大气气流的不稳定性,无人机和充电头往往存在偏差,经常导致充电头无法精准的和无人机配合,从而无法正常给无人机充电。
技术实现要素:
4.本实用新型为了解决现有的无人机机巢的充电头容易和无人机产生偏差的缺点,提出一种无人机机巢,可对无人机进行定位,从而使得充电头能对准无人机。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种无人机机巢,包括壳体以及滑动连接在壳体的上侧的盖板,壳体内设置有停机坪以及定位装置,定位装置包括两个相互平行的第一定位杆以及两个相互平行的第二定位杆,第一定位杆和第二定位杆垂直,第一定位杆和第二定位杆之间形成定位空间,定位装置还包括用于调节第一定位杆的间距以及用于调节第二定位杆间距的驱动装置,第一定位杆上设置有充电头。
7.通过上述设置,可实现无人机的定位,从而实现充电头和充电口的精确定位。具体的,当无人机落到停机坪上后,无人机上的充电口基本朝向充电头,无人机上的充电口和充电头存在偏差,无人机位于第一定位杆之间,同时,无人机位于第二定位杆之间,即无人机位于定位空间内,在驱动装置的作用下,第二定位杆靠拢并将无人机轻轻夹住以摆正无人机的位置,使得充电口对准第一定位杆上的充电头,在驱动装置的作用下,第二定位杆靠拢并夹住无人机,此时充电头准确无误和充电口配合以对无人机进行充电。
8.进一步的,壳体的上侧固定连接有滑轨,盖板的下侧和滑轨滑动连接,盖板的下侧固定连接有齿条,壳体内设置有驱动电机,驱动电机连接有齿轮,齿轮和齿条啮合。
9.通过上述设置,可实现盖板的开合。具体的,滑轨使得盖板的滑动更加稳定,驱动电机带动齿轮转动时,齿轮带动齿条沿齿条的轴线方向运动,从而实现盖板的开合,齿条的轴线和滑轨的轴线平行。
10.进一步的,壳体的一侧设置有散热口以及用于调节壳体内的温度的空调。
11.通过上述设置,可降低壳体内的温度,防止无人机的温度过高。由于本技术设置在
室外,在气温高的天气,壳体内的热量可通过散热口散发至大气,另外,空调可进一步降低壳体内的温度以保护无人机。
12.进一步的,停机坪的边缘设置有第一导向槽和第二导向槽,第一定位杆的两端的下侧固定连接有第一支撑杆,第一支撑杆的下侧设置在第一导向槽内并和驱动装置连接,第二定位杆的两端的下侧固定连接有第二支撑杆,第二支撑杆的下侧设置在第二导向槽内并和驱动装置连接。
13.通过上述设置,可实现第一定位杆和第二定位杆之间互不干涉的运动。具体的,第一定位杆设置在第二定位杆的上方,从而避免第一定位杆和第二定位杆之间干涉,第一定位杆的延伸方向和第一导向槽的延伸方向垂直,第二定位杆的延伸方向和第二导向槽的延伸方向垂直,当驱动装置驱动第一支撑杆沿第一导向槽运动时,第一定位杆跟随第一支撑杆运动,即第一定位杆也沿第一导向槽运动,当驱动装置驱动第二支撑杆沿第二导向槽运动时,第二定位杆跟随第二支撑杆运动,即第二定位杆也沿第二导向槽运动,两个第一定位杆的运动方向相反且运动速度的大小相等,两个第二定位杆的运动方向相反且运动速度的大小相等。
14.进一步的,驱动装置包括沿第一导向槽设置的第一传动带以及用于驱动第一传动带转动的电机,其中一个第一定位杆通过第一支撑杆和第一传动带的上侧连接,另一个第一定位杆通过第一支撑杆和第一传动带的下侧连接,当第一传动带在电机的作用下转动时,两个第一定位杆的运动方向相反且运动速度相等。驱动装置还包括沿第二导向槽设置的第二传动带,第二传动带和第一传动带之间通过传动组件连接,从而当电机带动第一传动带运行时,第二传动带也一起运动,其中一个第二定位杆通过第二支撑杆和第二传动带的上侧连接,另一个第二定位杆通过第二支撑杆和第二传动带的下侧连接,当第二传动带在电机的作用下转动时,两个第二定位杆的运动方向相反且运动速度相等。
15.进一步的,壳体的下侧设置有若干万向轮。从而方便壳体的移动。
16.进一步的,壳体的下侧固定连接有连接座。连接座可通过紧固件固定在地面上。
17.进一步的,停机坪的上侧设置有用于吸附无人机的吸附装置,吸附装置包括设置在停机坪的上侧的吸附槽以及和齿轮固定连接的驱动带轮,停机坪的一侧转动连接有从动带轮,驱动带轮和从动带轮之间通过同步带连接,从动带轮固定连接有第一伞齿轮,第一伞齿轮啮合有第二伞齿轮,第二伞齿轮固定连接有丝杆,停机坪的下侧设置有腔体,腔体和吸附槽连通,腔体内滑动连接有柱塞,柱塞和丝杆螺纹连接。
18.通过上述设置,可防止无人机意外启动,并且,实现吸附装置和盖板的联动,具体的,当无人机落到停机坪上时,无人机和吸附槽的槽口抵接,为了增加吸附槽的槽口和无人机之间的气密性,可在吸附槽的槽口设置密封圈,当第一定位杆和第二定位杆将无人机定位完成后,驱动电机带动齿轮转动,齿轮带动齿条和盖板运动,盖板慢慢合上,在这个过程中,齿轮通过驱动带轮、同步带、从动带轮、第一伞齿轮和第二伞齿轮带动丝杆转动,丝杆和柱塞相对转动,从而使得柱塞沿丝杆的轴线方向运动,丝杆的延伸方向和腔体的延伸方向一致,柱塞沿腔体远离吸附槽,使得吸附槽内的气压降低,最终吸附槽把无人机吸附在停机坪上,以防无人机意外启动。
19.当无人机需要启动时,第一定位杆和第二定位杆离开无人机,然后驱动电机带动齿轮转动,齿轮带动齿条和盖板运动,在盖板打开的过程中,齿轮通过驱动带轮、同步带、从
动带轮、第一伞齿轮和第二伞齿轮带动丝杆转动,丝杆和柱塞相对转动,柱塞沿腔体靠近吸附槽,使得吸附槽内的气压回升,最终吸附槽松开无人机,松开后无人机可向上起飞。
附图说明
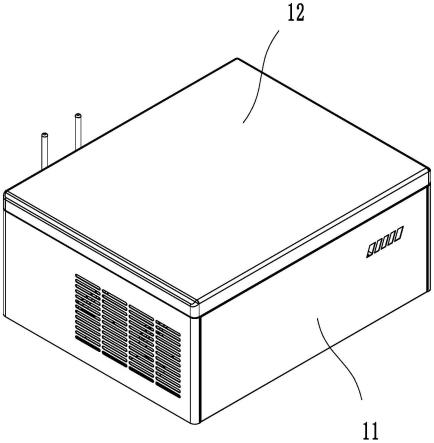
20.图1为实施例的示意图。
21.图2为实施例盖板打开后的示意图。
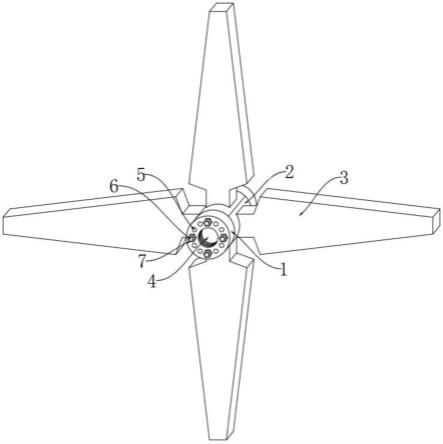
22.图3为图2的俯视图。
23.图4为实施例的侧视图一。
24.图5为实施例的侧视图二。
25.图6为实施例吸附装置吸附无人机的示意图。
26.图7为实施例吸附装置松开无人机的示意图。
具体实施方式
27.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
28.参见图1至图7,一种无人机机巢,包括壳体11以及滑动连接在壳体11的上侧的盖板12,壳体11内设置有停机坪13以及定位装置,定位装置包括两个相互平行的第一定位杆14以及两个相互平行的第二定位杆15,第一定位杆14和第二定位杆15垂直,第一定位杆14和第二定位杆15之间形成定位空间,定位装置还包括用于调节第一定位杆14的间距以及用于调节第二定位杆15间距的驱动装置,第一定位杆14上设置有充电头16,停机坪13的上侧设置有用于吸附无人机21的吸附装置。
29.通过上述设置,可实现无人机21的定位,从而实现充电口和充电头的精准对位,并且可防止无人机意外启动。具体的,当无人机21落到停机坪13上后,无人机21上的充电口基本朝向充电头16,无人机21上的充电口和充电头16存在偏差,无人机21位于第一定位杆14之间,同时,无人机21位于第二定位杆15之间,即无人机21位于定位空间内,在驱动装置的作用下,第二定位杆15靠拢并将无人机21轻轻夹住以摆正无人机21的位置,使得充电口对准第一定位杆14上的充电头16,在驱动装置的作用下,第二定位杆15靠拢并夹住无人机21,此时充电头16准确无误和充电口配合以对无人机21进行充电。然后盖板12关上,吸附装置将无人机21的下侧吸住,当无人机21意外启动时,吸附装置防止无人机21向上离开停机坪13,从而防止无人机21破坏。当无人机21需要启动时,盖板12打开,第一定位杆14松开无人机21脱开,第二定位杆15松开无人机21脱开,当盖板12打开后,吸附装置松开无人机21,无人机21启动并飞出壳体11。
30.作为一种实现方式,壳体11的上侧固定连接有滑轨111,盖板12的下侧和滑轨111滑动连接,盖板12的下侧固定连接有齿条121,壳体11内设置有驱动电机112,驱动电机112连接有齿轮113,齿轮113和齿条121啮合。
31.通过上述设置,可实现盖板12的开合。具体的,滑轨111使得盖板12的滑动更加稳定,驱动电机112带动齿轮113转动时,齿轮113带动齿条121沿齿条121的轴线方向运动,从而实现盖板12的开合,齿条121的轴线和滑轨111的轴线平行。
32.作为一种实现方式,壳体11的一侧设置有散热口114以及用于调节壳体11内的温度的空调115。
33.通过上述设置,可降低壳体11内的温度,防止无人机21的温度过高。由于本技术设置在室外,在气温高的天气,壳体11内的热量可通过散热口114散发至大气,另外,空调115可进一步降低壳体11内的温度以保护无人机21。
34.作为一种实现方式,停机坪13的边缘设置有第一导向槽131和第二导向槽132,第一定位杆14的两端的下侧固定连接有第一支撑杆141,第一支撑杆141的下侧设置在第一导向槽131内并和驱动装置连接,第二定位杆15的两端的下侧固定连接有第二支撑杆151,第二支撑杆151的下侧设置在第二导向槽132内并和驱动装置连接。
35.通过上述设置,可实现第一定位杆14和第二定位杆15之间互不干涉的运动。具体的,第一定位杆14设置在第二定位杆15的上方,从而避免第一定位杆14和第二定位杆15之间干涉,第一定位杆14的延伸方向和第一导向槽131的延伸方向垂直,第二定位杆15的延伸方向和第二导向槽132的延伸方向垂直,当驱动装置驱动第一支撑杆141沿第一导向槽131运动时,第一定位杆14跟随第一支撑杆141运动,即第一定位杆14也沿第一导向槽131运动,当驱动装置驱动第二支撑杆151沿第二导向槽132运动时,第二定位杆15跟随第二支撑杆151运动,即第二定位杆15也沿第二导向槽132运动,两个第一定位杆14的运动方向相反且运动速度的大小相等,两个第二定位杆15的运动方向相反且运动速度的大小相等。
36.作为一种实现方式,驱动装置包括沿第一导向槽131设置的第一传动带(图中未示出)以及用于驱动第一传动带转动的电机(图中未示出),其中一个第一定位杆14通过第一支撑杆141和第一传动带的上侧连接,另一个第一定位杆14通过第一支撑杆141和第一传动带的下侧连接,当第一传动带在电机的作用下转动时,两个第一定位杆14的运动方向相反且运动速度相等。驱动装置还包括沿第二导向槽132设置的第二传动带(图中未示出),第二传动带和第一传动带之间通过传动组件连接,从而当电机带动第一传动带运行时,第二传动带也一起运动,其中传动组件为现有技术,此处不做展开,其中一个第二定位杆15通过第二支撑杆151和第二传动带的上侧连接,另一个第二定位杆15通过第二支撑杆151和第二传动带的下侧连接,当第二传动带在电机的作用下转动时,两个第二定位杆15的运动方向相反且运动速度相等。
37.作为另一种实现方式,驱动装置还可以设置为两个第一电缸和两个第二电缸。其中,两个第一电缸和两个第一定位杆一一对应,第一电缸和对应的第一定位杆连接从而可控制第一定位杆的间距,两个第二电缸和两个第二定位杆一一对应,第二电缸和对应的第二定位杆连接从而可控制第二定位杆的间距。驱动装置还可以有多种形式,具体可根据实际需求做调整。
38.作为一种实现方式,壳体11的下侧设置有若干万向轮116。从而方便壳体11的移动。
39.作为一种实现方式,壳体11的下侧固定连接有连接座117。连接座117可通过紧固件固定在地面上。
40.作为一种实现方式,吸附装置包括设置在停机坪13的上侧的吸附槽133以及和齿轮113固定连接的驱动带轮1131,停机坪13的一侧转动连接有从动带轮134,驱动带轮1131和从动带轮134之间通过同步带1132连接,从动带轮134固定连接有第一伞齿轮135,第一伞齿轮135啮合有第二伞齿轮136,第二伞齿轮136固定连接有丝杆137,停机坪13的下侧设置有腔体138,腔体138和吸附槽133连通,腔体138内滑动连接有柱塞139,柱塞139和丝杆137
螺纹连接。
41.通过上述设置,实现吸附装置和盖板12的联动,具体的,当无人机21落到停机坪13上时,无人机21和吸附槽133的槽口抵接,为了增加吸附槽133的槽口和无人机21之间的气密性,可在吸附槽133的槽口设置密封圈,参见图7,当第一定位杆14和第二定位杆15将无人机21定位完成后,驱动电机112带动齿轮113转动,齿轮113带动齿条121和盖板12运动,盖板12慢慢合上,在这个过程中,齿轮113通过驱动带轮1131、同步带1132、从动带轮134、第一伞齿轮135和第二伞齿轮136带动丝杆137转动,丝杆137和柱塞139相对转动,从而使得柱塞139沿丝杆137的轴线方向运动,丝杆137的延伸方向和腔体138的延伸方向一致,柱塞139沿腔体138远离吸附槽133,使得吸附槽133内的气压降低,最终吸附槽133把无人机21吸附在停机坪13上,以防无人机21意外启动,参见图6。
42.当无人机21需要启动时,第一定位杆14和第二定位杆15离开无人机21,然后驱动电机112带动齿轮113转动,齿轮113带动齿条121和盖板12运动,在盖板12打开的过程中,齿轮113通过驱动带轮1131、同步带1132、从动带轮134、第一伞齿轮135和第二伞齿轮136带动丝杆137转动,丝杆137和柱塞139相对转动,柱塞139沿腔体138靠近吸附槽133,使得吸附槽133内的气压回升,最终吸附槽133松开无人机21,松开后无人机21可向上起飞,参见图7。
43.应当理解的是,对于本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。