技术特征:
1.一种机器人清洁器,所述机器人清洁器根据从终端输入的清洁命令在清洁区域中行驶的同时清洁地板表面,所述机器人清洁器包括:主体,在所述主体中包括用于容纳电池、水容器和马达的空间;以及一对旋转板,所述一对旋转板包括下侧,面向所述地板表面的拖把联接到所述下侧,并且所述一对旋转板能旋转地布置在所述主体的底表面上;其中,从所述终端指定所述清洁区域的预定区域,所述机器人清洁器在指定区域内行驶。2.根据权利要求1所述的机器人清洁器,其中,当从所述终端设定行驶模式时,所述机器人清洁器根据所述行驶模式在所述指定区域内行驶。3.根据权利要求1所述的机器人清洁器,其中,所述终端从抽吸清洁器接收关于在所述清洁区域中的行驶的信息,所述抽吸清洁器包括灰尘入口和一对轮并且在所述清洁区域中行驶,并且所述终端基于从所述抽吸清洁器接收的信息来指定所述指定区域。4.根据权利要求1所述的机器人清洁器,其中,在根据预输入清洁命令在所述清洁区域中行驶的同时,从所述终端接收关于所述指定区域的信息,所述机器人清洁器根据现有清洁命令继续行驶,并且在进入所述指定区域时在所述指定区域内行驶。5.一种机器人清洁器,所述机器人清洁器根据从终端输入的清洁命令在清洁区域中行驶的同时清洁地板表面,所述机器人清洁器包括:主体,在所述主体中包括用于容纳电池、水容器和马达的空间;以及一对旋转板,所述一对旋转板包括下侧,面向所述地板表面的拖把联接到所述下侧,并且所述一对旋转板能旋转地布置在所述主体的底表面上;其中,当从所述终端输入行驶模式时,所述机器人清洁器根据所述行驶模式行驶。6.一种机器人清洁器的控制系统,所述机器人清洁器的控制系统包括:机器人清洁器,所述机器人清洁器存储包括关于清洁区域的可行驶区域的信息的地图并在所述清洁区域中行驶;以及终端,所述终端向所述机器人清洁器输入清洁命令,其中,所述终端显示所述地图并且响应于用户输入在所述地图上设定虚拟的指定区域,当从所述终端设定所述指定区域时,所述机器人清洁器移向所述指定区域并在所述指定区域内行驶。7.根据权利要求6所述的机器人清洁器的控制系统,其中,所述终端以连接多个点的表面的形式设定所述指定区域。8.根据权利要求7所述的机器人清洁器的控制系统,其中,所述终端显示至少一个或更多个行驶模式,设定所述行驶模式中的任一个行驶模式,所述机器人清洁器根据在所述终端中设定的所述行驶模式在所述指定区域内行驶。9.根据权利要求7所述的机器人清洁器的控制系统,其中,所述终端以表面的形式显示所述指定区域,并且设定表示为所述指定区域内部的线的行驶模式,所述机器人清洁器根据在所述终端中设定的所述行驶模式在所述指定区域内行驶。10.根据权利要求6所述的机器人清洁器的控制系统,其中,所述终端在所述地图上显示多个划分区域,并且将所述划分区域设定为所述指定区域,
所述机器人清洁器在所述划分区域中行驶。11.根据权利要求10所述的机器人清洁器的控制系统,其中,所述终端在所述划分区域中设定清洁顺序,所述机器人清洁器根据在所述终端中设定的所述清洁顺序在所述划分区域中行驶。12.根据权利要求10所述的机器人清洁器的控制系统,其中,所述终端显示至少一个或更多个行驶模式,并且设定所述行驶模式中的任一个行驶模式,所述机器人清洁器根据在所述终端中设定的所述行驶模式在所述指定区域内行驶。13.一种机器人清洁器的控制方法,所述机器人清洁器的控制方法包括以下步骤:在终端上显示存储在所述机器人清洁器中的地图,并且所述终端响应于所述地图设定所述机器人清洁器行驶的指定区域;计算所述指定区域相对于清洁区域的位置;在所述地图上登记所述指定区域;以及使所述机器人清洁器在所述指定区域内行驶。14.根据权利要求13所述的机器人清洁器的控制方法,所述机器人清洁器的控制方法还包括以下步骤:当从所述终端输入清洁命令时,响应于所述地图确定当前位置;以及当所述当前位置被确定时,移向所述指定区域。15.根据权利要求13所述的机器人清洁器的控制方法,所述机器人清洁器的控制方法还包括以下步骤:从所述终端设定行驶模式;以及根据所述行驶模式使所述机器人清洁器在所述指定区域内行驶。16.根据权利要求15所述的机器人清洁器的控制方法,其中,在设定所述行驶模式的步骤中,通过在所述指定区域内进行触摸和拖动来生成呈线的形式的所述行驶模式。17.根据权利要求15所述的机器人清洁器的控制方法,其中,在设定所述行驶模式的步骤中,根据用户输入通过在所述终端的屏幕上显示的虚拟方向键来生成所述行驶模式。18.一种机器人清洁器的控制系统,所述机器人清洁器的控制系统包括:多个机器人清洁器,所述多个机器人清洁器存储包括关于清洁区域的可行驶区域的信息的地图并在所述清洁区域中行驶;以及终端,所述终端向所述机器人清洁器中的每一个机器人清洁器输入清洁命令,其中,所述终端显示所述地图,并且响应于用户输入在所述地图上设定与所述机器人清洁器的数量相对应的多个虚拟的指定区域,当由所述终端设定所述指定区域中的每一个指定区域时,所述机器人清洁器中的每一个机器人清洁器移向所述指定区域并且在所述指定区域内行驶,并且当针对所述指定区域的行驶结束时,所述机器人清洁器中的每一个机器人清洁器在由其它机器人清洁器行驶的所述指定区域中行驶。19.一种机器人清洁器的控制系统,所述机器人清洁器的控制系统包括:机器人清洁器,所述机器人清洁器包括:主体,在所述主体中包括用于容纳电池、水容器和马达的空间;以及一对旋转板,所述一对旋转板包括下侧,面向地板表面的拖把联接到所述下侧,并且所述一对旋转板能旋转地布置在所述主体的底表面上,所述机器人清洁器
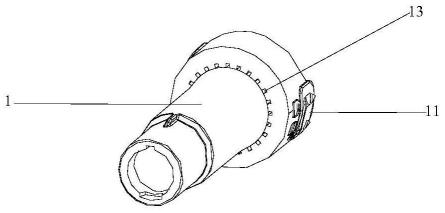
存储包括关于清洁区域的可行驶区域的信息的地图,并且在所述清洁区域中行驶;抽吸清洁器,所述抽吸清洁器包括主体,所述主体具有灰尘入口和一对轮,并且所述抽吸清洁器在所述清洁区域中行驶;终端,所述终端向所述机器人清洁器和所述抽吸清洁器输入清洁命令,其中,所述终端显示所述地图,并且响应于用户输入在所述地图上设定与所述机器人清洁器的数量相对应的多个虚拟的指定区域,当由所述终端设定所述指定区域中的每一个指定区域时,所述机器人清洁器中的每一个机器人清洁器移向所述指定区域并且在所述指定区域内行驶,并且当针对所述指定区域的行驶结束时,所述机器人清洁器中的每一个机器人清洁器在由其它机器人清洁器行驶的所述指定区域中行驶。
技术总结
本发明涉及一种机器人清洁器、控制机器人清洁器的系统以及控制机器人清洁器的方法,并且包括:机器人清洁器,该机器人清洁器存储包括关于清洁区域中的可行进区域的信息的地图,并且在清洁区域中行进;以及终端,该终端用于向机器人清洁器输入清洁命令。终端响应于用户输入设定地图的虚拟的指定区域,并且当指定区域由终端设定时,机器人清洁器移向指定区域并且在指定区域内行进,因此具有集中地清洁由用户任意指定的指定区域的效果。户任意指定的指定区域的效果。户任意指定的指定区域的效果。
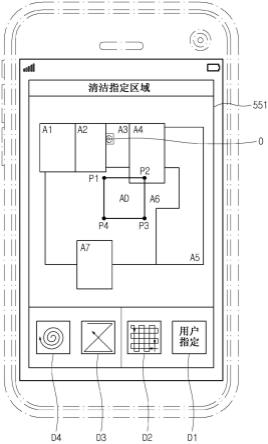
技术研发人员:沈印辅 柳桓 安承振
受保护的技术使用者:LG电子株式会社
技术研发日:2021.06.10
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。