1.本发明涉及图像检测技术领域,尤其涉及一种交通场景的障碍物检测方法、装置、设备及存储介质。
背景技术:
2.道路交通安全危害是当前全球共同面临的社会安全问题。根据世卫组织的统计,全球每年因道路交通事故造成约135万人死亡,2000~5000万人受伤。从交通事故类别上看,和汽车相关的占比超过2/3,而且危害也最严重。从交通事故源头上看,绝大多数交通事故所造成的危害来源于车辆与障碍物的碰撞,因此如何准确检测障碍物成为避免交通事故发生的重要研究方向。
3.早期的交通场景的障碍物检测方法通常是将深度信息映射到2d或3d占用网格中,并将动态规划应用于该占用网格,最终找到障碍物区域和可通行区域的最佳分界线。这种方法无法提供障碍物的具体位置信息,且检测精度普遍较低,因此往往只适用于一些简单的场景。然而,随着道路交通场景的复杂化,如仍沿用上述检测方法,仍有较大可能导致交通事故的发生。因此,目前行业内亟需一种能够在各种交通场景中准确检测到障碍物的检测方法。
4.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
5.本发明的主要目的在于提供了一种交通场景的障碍物检测方法、装置、设备及存储介质,旨在解决现有的交通场景的障碍物检测方法无法准确检测障碍物具体位置信息的技术问题。
6.为实现上述目的,本发明提供了一种交通场景的障碍物检测方法,所述方法包括以下步骤:
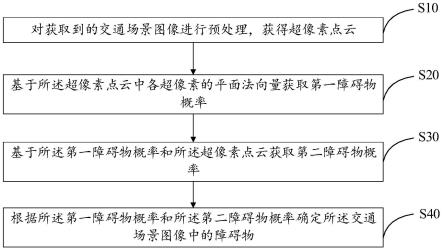
7.对获取到的交通场景图像进行预处理,获得超像素点云;
8.基于所述超像素点云中各超像素的平面法向量获取第一障碍物概率;
9.基于所述第一障碍物概率和所述超像素点云获取第二障碍物概率;
10.根据所述第一障碍物概率和所述第二障碍物概率确定所述交通场景图像中的障碍物。
11.可选地,所述基于所述超像素点云中各超像素的平面法向量获取第一障碍物概率,包括:
12.基于所述超像素点云中包含的3d点云信息拟合局部平面;
13.基于所述局部平面在所述超像素点云中获取各超像素的平面法向量;
14.基于所述平面法向量与空间直角坐标系的位置关系获取第一障碍物概率。
15.可选地,所述基于所述平面法向量与空间直角坐标系的位置关系获取第一障碍物
概率,包括:
16.获取所述超像素点云中各超像素的平面法向量在空间直角坐标系中与y轴正方向之间的夹角值;
17.对所述夹角值进行归一化处理,获得归一化夹角值;
18.通过sigmoid函数将所述归一化夹角值转换为第一障碍物概率。
19.可选地,所述基于所述第一障碍物概率和所述超像素点云获取第二障碍物概率,包括:
20.将所述超像素点云中第一障碍物概率小于第一预设阈值的超像素设定为自由空间超像素;
21.基于所述自由空间超像素确定第二障碍物概率。
22.可选地,所述基于所述自由空间超像素确定第二障碍物概率,包括:
23.根据ransac算法和所述自由空间超像素拟合交通场景中的道路平面;
24.计算所述超像素点云中各像素点与所述道路平面之间的高度均值;
25.将所述高度均值进行归一化处理,获得归一化高度均值;
26.通过sigmoid函数将所述归一化高度均值转换为第二障碍物概率。
27.可选地,所述根据所述第一障碍物概率和所述第二障碍物概率确定所述交通场景图像中的障碍物,包括:
28.对所述第一障碍物概率和所述第二障碍物概率进行融合,获得融合概率;
29.将所述融合概率大于第二预设阈值的超像素对应的区域确定为所述交通场景图像中的障碍物。
30.可选地,所述根据所述第一障碍物概率和所述第二障碍物概率确定所述交通场景图像中的障碍物之后,还包括:
31.对所述交通场景图像中被检测为障碍物对应的超像素进行水平分割,获得棒状像素;
32.对所述棒状像素进行视差优化,获得多层棒状像素;
33.基于所述多层棒状像素确定所述交通场景图像中不同障碍物之间的分界线以及所述障碍物与当前拍摄位置之间的距离。
34.此外,为实现上述目的,本发明还提出一种交通场景的障碍物检测装置,所述交通场景的障碍物检测装置包括:
35.图像处理模块,用于对获取到的交通场景图像进行预处理,获得超像素点云;
36.第一计算模块,用于基于所述超像素点云中各超像素的平面法向量获取第一障碍物概率;
37.第二计算模块,用于基于所述第一障碍物概率和所述超像素点云获取第二障碍物概率;
38.概率融合模块,用于根据所述第一障碍物概率和所述第二障碍物概率确定所述交通场景图像中的障碍物。
39.此外,为实现上述目的,本发明还提出一种交通场景的障碍物检测设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的交通场景的障碍物检测程序,所述交通场景的障碍物检测程序配置为实现如上文所述的交通场景的障碍物
检测方法的步骤。
40.此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有交通场景的障碍物检测程序,所述交通场景的障碍物检测程序被处理器执行时实现如上文所述的交通场景的障碍物检测方法的步骤。
41.本发明对获取到的交通场景图像进行预处理,获得超像素点云;基于超像素点云中各超像素的平面法向量获取第一障碍物概率;基于第一障碍物概率和超像素点云获取第二障碍物概率;将第一障碍物概率和第二障碍物概率融合后获得融合概率,根据融合概率确定交通场景图像中的障碍物。相比于现有技术将深度信息映射到2d或3d占用网格中,通过寻找被占用的网格找到障碍物区域和可通行区域的最佳分界线,本发明上述方法提出了基于局部空间特征信息的交通场景的障碍物检测方法,即通过平面法向量特征和高度特征两个角度综合计算局部区域存在障碍物的概率,从而能够将各种交通场景划分为障碍物类和自由空间类,进而提高了交通场景中对障碍物进行检测并提供障碍物具体位置信息的准确性。
附图说明
42.图1为本发明实施例方案涉及的硬件运行环境的交通场景的障碍物检测设备的结构示意图;
43.图2为本发明交通场景的障碍物检测方法第一实施例的流程示意图;
44.图3为本发明交通场景的障碍物检测方法第二实施例的流程示意图;
45.图4为本发明交通场景的障碍物检测方法障碍物和自由空间区域点云分布对比图;
46.图5为本发明交通场景的障碍物检测方法第三实施例的流程示意图;
47.图6为本发明交通场景的障碍物检测方法的棒状像素分割结果示意图;
48.图7为本发明交通场景的障碍物检测装置第一实施例的结构框图。
49.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
50.应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
51.参照图1,图1为本发明实施例方案涉及的硬件运行环境的交通场景的障碍物检测设备结构示意图。
52.如图1所示,该交通场景的障碍物检测设备可以包括:处理器1001,例如中央处理器(central processing unit,cpu),通信总线1002、用户接口1003,网络接口1004,存储器1005。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(display)、输入单元比如键盘(keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如无线保真(wireless-fidelity,wi-fi)接口)。存储器1005可以是高速的随机存取存储器(random access memory,ram),也可以是稳定的非易失性存储器(non-volatile memory,nvm),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
53.本领域技术人员可以理解,图1中示出的结构并不构成对交通场景的障碍物检测
设备的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
54.如图1所示,作为一种存储介质的存储器1005中可以包括操作系统、网络通信模块、用户接口模块以及交通场景的障碍物检测程序。
55.在图1所示的交通场景的障碍物检测设备中,网络接口1004主要用于与网络服务器进行数据通信;用户接口1003主要用于与用户进行数据交互;本发明交通场景的障碍物检测设备中的处理器1001、存储器1005可以设置在交通场景的障碍物检测设备中,所述交通场景的障碍物检测设备通过处理器1001调用存储器1005中存储的交通场景的障碍物检测程序,并执行本发明实施例提供的交通场景的障碍物检测方法。
56.本发明实施例提供了一种交通场景的障碍物检测方法,参照图2,图2为本发明交通场景的障碍物检测方法第一实施例的流程示意图。
57.本实施例中,所述交通场景的障碍物检测方法包括以下步骤:
58.步骤s10:对获取到的交通场景图像进行预处理,获得超像素点云。
59.需要说明的是,本实施例方法的执行主体可以是具有数据处理、网络通讯以及程序运行功能的计算服务设备,例如手机、平板电脑、个人电脑等,还可以是能够实现相同或相似功能的其他电子设备,本实施例对此不加以限制。此处将以个人电脑为例对本发明交通场景的障碍物检测方法的各项实施例进行说明。
60.可理解的是,上述交通场景图像指的是包含行人、车辆、建筑物等各种交通元素的图像。
61.应理解的是,上述预处理的处理项目可以包含立体匹配、超像素分割和点云预处理。其中,上述立体匹配可以通过psmnet(pyramid stereo matching network,金字塔立体匹配网络)实现;上述点云预处理可以通过滤波操作对经过立体匹配后获得的点云中由于误匹配或距离过远造成的离群值点和无效值点进行过滤,从而在减小数据规模的同时提高点云质量;上述超像素分割可以通过slic(simple linear iterative clustering,简单线性迭代聚类)算法来实现,该算法不同于简单的矩形超像素分割,它能够较好的保留图像的轮廓信息,尽可能使超像素中的点来自于同一个物体。这样能够尽量避免超像素中同时含有障碍物点和自由空间点,导致难以对该超像素进行分类。此外,slic算法能够减小同一个超像素中点云在深度上的差异,有利于后续对这些点云进行平面拟合。
62.步骤s20:基于所述超像素点云中各超像素的平面法向量获取第一障碍物概率。
63.需要说明的是,上述基于超像素点云中各超像素的平面法向量获取第一障碍物概率的方法可以总结为基于平面法向量的交通场景的障碍物检测(obstacle detection based on plane normal vector,od-pnv)方法。相对于传统的基于几何结构的交通场景的障碍物检测方法,该方法无需建立道路平面模型,因此检测结果不受道路平面拟合精度的影响。同时由于该方法根据每个超像素的局部平面法向量对其进行独立检测,因此受路面倾斜和凹凸不平等状况的影响较小。
64.进一步地,在本实施例中,为了准确获取第一障碍物概率从而初步确定障碍物,所述步骤s20可包括:
65.步骤s201:基于所述超像素点云中包含的3d点云信息拟合局部平面。
66.可理解的是,上述3d点云信息为超像素点云表面结构的一种三维数字化表达形
式,它包含三维位置信息、颜色等多种信息。
67.在具体实现中,可以通过ransac算法(random sample consensus,随机抽样一致算法)进行局部平面的拟合。
68.步骤s202:基于所述局部平面在所述超像素点云中获取各超像素的平面法向量。
69.需要说明的是,上述超像素的平面法向量表示垂直于上述局部平面的非零向量,且每个超像素对应的平面法向量经过该超像素的中心点。
70.步骤s203:基于所述平面法向量与空间直角坐标系的位置关系获取第一障碍物概率。
71.需要说明的是,上述空间直角坐标系包含x轴、y轴以及z轴,并且在空间直角坐标系中,障碍物区域点云分布更趋近于垂直,而自由空间区域的点云分布则更趋近于水平。
72.进一步地,在本实施例中,为了将超像素点云对应的障碍物和自由空间区别开,所述步骤s203可包括:
73.步骤s2031:获取所述超像素点云中各超像素的平面法向量在空间直角坐标系中与y轴正方向之间的夹角值。
74.可理解的是,假设ho表示超像素属于障碍物,hf表示超像素属于自由空间,则ho和hf互为对立事件。每个局部平面用模型ax by cz d=0表示,则其法向量可以表示为(a,b,c)。进一步地,该法向量在空间直角坐标系中与y轴正方向之间的夹角值θ可以表示为:
75.其中,θ∈(0,π/2)。
76.步骤s2032:对所述夹角值进行归一化处理,获得归一化夹角值。
77.应理解的是,上述归一化处理可以通过以下公式实现:
78.其中dv
pnv
即为上述归一化夹角值。
79.步骤s2033:通过sigmoid函数将所述归一化夹角值转换为第一障碍物概率。
80.需要说明的是,上述sigmoid函数为一种具有s形曲线的数学函数,更具体地可以将它定义为挤压函数,因其输出限制在0和1之间,从而使得sigmoid函数可以应用在概率预测中,在本实施例中可以通过以下公式表示:
[0081][0082]
其中,pr
pnv
为上述sigmoid函数的输出值,可以用于表示上述第一障碍物概率。
[0083]
步骤s30:基于所述第一障碍物概率和所述超像素点云获取第二障碍物概率。
[0084]
需要说明的是,上述基于第一障碍物概率和超像素点云获取第二障碍物概率的方法可以总结为基于超像素点云高度的交通场景的障碍物检测(obstacle detection based on superpixel point-cloud height,od-sph)方法。此方法结合od-pnv方法的运算结果,提高了道路平面拟合的精度。根据拟合出的道路平面能够较精确地计算超像素点云距离路面的高度,并根据高度值检测障碍物。该方法对于明显突出路面的障碍物有较好的检测效果。它在原理及所利用的特征信息上与od-pnv方法不同,因此对od-pnv方法起到了很好的补充作用。
[0085]
步骤s40:根据所述第一障碍物概率和所述第二障碍物概率确定所述交通场景图
像中的障碍物。
[0086]
需要说明的是,上述将所述第一障碍物概率和所述第二障碍物概率融合后获得融合概率的方法可以总结为基于局部空间特征信息的交通场景的障碍物检测(obstacle detection based on local spatial feature,od-lsf)方法。该方法将上述od-pnv方法和od-sph方法的输出结果相融合,能够对距离路面较近的障碍物区域以及车辆引擎盖和车顶等区域的障碍物进行准确检测。
[0087]
本实施例对获取到的交通场景图像进行预处理,获得超像素点云;基于超像素点云中各超像素的平面法向量获取第一障碍物概率;基于第一障碍物概率和超像素点云获取第二障碍物概率;根据第一障碍物概率和第二障碍物概率确定交通场景图像中的障碍物。相比于现有技术将深度信息映射到2d或3d占用网格中,通过寻找被占用的网格找到障碍物区域和可通行区域的最佳分界线,本实施例上述方法提出了基于局部空间特征信息的交通场景的障碍物检测方法,即通过平面法向量特征和高度特征两个角度综合计算局部区域存在障碍物的概率,从而能够将各种交通场景划分为障碍物类和自由空间类,进而提高了交通场景中对障碍物进行检测并提供障碍物具体位置信息的准确性。
[0088]
参考图3,图3为本发明交通场景的障碍物检测方法第二实施例的流程示意图。
[0089]
基于上述第一实施例,在本实施例中,为了确定上述基于od-pnv方法检测到的自由空间中是否还存在障碍物,所述步骤s30,可包括:
[0090]
步骤s301:将所述超像素点云中第一障碍物概率小于第一预设阈值的超像素设定为自由空间超像素。
[0091]
应理解的是,交通场景中常见的障碍物主要包括车辆、行人、建筑和树木等,其对应的超像素可以称为障碍物超像素;而自由空间则主要包括道路和停车场等区域,其对应的超像素可以称为自由空间超像素。
[0092]
参考图4,图4为本发明交通场景的障碍物检测方法障碍物和自由空间区域点云分布对比图,图中坐标原点为超像素点云质心,x轴与光轴重合指向相机前方,y轴与x轴垂直,指向相机上方,z轴与y轴、x轴垂直并指向相机左方。图4(a)为经过预处理(即立体匹配、超像素分割和点云预处理)后的经典交通场景图。从图4(b)中可以看出,障碍物区域点云分布更趋近于垂直,而从图4(d)中可以看出自由空间区域的点云分布则更趋近于水平。如果用一个平面对超像素中的点云进行拟合,当超像素对应的平面法向量与y轴正方向的夹角值越大时,如图4(c)所示,说明该超像素越符合障碍物区域的特征;当超像素对应的平面法向量与y轴正方向的夹角值越小时,如图4(e)所示,说明该超像素越符合自由空间区域的特征。上述od-pnv方法通过点云的这一特征来区分障碍物和自由空间。首先对超像素中的点云进行平面拟合,然后根据夹角值计算超像素属于障碍物的概率(也即上述第一实施例中提到的第一障碍物概率),同时将不属于障碍物的部分暂时判断为自由空间。
[0093]
步骤s302:基于所述自由空间超像素确定第二障碍物概率。
[0094]
需要说明的是,虽然上述od-pnv方法可以对大部分超像素进行正确分类,但这种方法也存在一定的局限性,它无法将一些拥有平面几何结构的障碍物区域(如机动车引擎盖)和自由空间正确区分。换句话来说,经过上述od-pnv方法确定的自由空间中仍有存在障碍物的可能性。因此,在本实施例中可以通过上述第一实施例中提到的od-sph方法来弥补上述od-pnv方法的缺点,同时根据超像素高度信息确定其属于障碍物的概率(也即第二障
碍物概率)。
[0095]
进一步地,在本实施例中,为了基于超像素点云高度准确获得第二障碍物概率,所述步骤s302可包括:
[0096]
步骤s3021:根据ransac算法和所述自由空间超像素拟合交通场景中的道路平面。
[0097]
需要说明的是,由于被上述od-pnv方法分类为自由空间的超像素绝大多数位于道路平面附近,数据集中内点比例显著提高,因此提高了算法的效率,同时也避免了在路面情况复杂的场景中产生道路平面拟合错误的情况。
[0098]
步骤s3022:计算所述超像素点云中各像素点与所述道路平面之间的高度均值。
[0099]
应理解的是,根据拟合出的道路平面模型ax by cz d=0可以计算超像素点云中每个点到路面的距离。假设超像素s中有一点pi(xi,yi,zi)(i=1...n),超像素点云距离路面的高度可由点云中各点的高度均值h表示:
[0100][0101]
步骤s3023:将所述高度均值进行归一化处理,获得归一化高度均值。
[0102]
应理解的是,上述归一化处理可以通过以下公式实现:
[0103]
dv
sph
=(h-0.5)*10其中dv
sph
即为上述归一化高度均值。
[0104]
步骤s3024:通过sigmoid函数将所述归一化高度均值转换为第二障碍物概率。
[0105]
可理解的是,可以通过以下公式表示步骤s3024的过程:
[0106][0107]
其中,pr
sph
为上述sigmoid函数的输出值,可以用于表示上述第二障碍物概率。
[0108]
应理解的是,由于上述pr
sph
是根据超像素点云高度得到的,因此能够对车辆引擎盖等具有平面几何结构的障碍物区域进行准确识别。
[0109]
本实施例通过将超像素点云中第一障碍物概率小于第一预设阈值的超像素设定为自由空间超像素,根据ransac算法和自由空间超像素拟合交通场景中的道路平面,然后计算超像素点云中各像素点与道路平面之间的高度均值,将高度均值进行归一化处理,获得归一化高度均值,最后通过sigmoid函数将归一化高度均值转换为第二障碍物概率。相较于现有技术中通过对交通场景进行投影来判断障碍物位置,本实施例上述方法能够精确地计算超像素点云距离路面的高度,并根据高度值检测障碍物,从而能够检测到具有平面几何结构的障碍物(如车辆引擎盖),提高了交通场景的障碍物检测的准确性。
[0110]
参考图4,图4为本发明交通场景的障碍物检测方法第三实施例的流程示意图。
[0111]
基于上述各实施例,在本实施例中,为了能够在复杂交通场景中基于平面法向量和点云高度综合考量的角度准确检测障碍物,所述步骤s40,可包括:
[0112]
步骤s401:对所述第一障碍物概率和所述第二障碍物概率进行融合,获得融合概率。
[0113]
应理解的是,可以引用贝叶斯框架对上述第一障碍物概率和第二障碍物概率进行融合。贝叶斯框架适用于基于多因素的概率方式的决策推理,相比于利用单一信息进行交通场景的障碍物检测的方法更符合人脑的判断决策过程。具体可通过以下公式实现:
[0114][0115]
其中,pr
x
表示超像素点云中任意一个超像素为障碍物的先验概率,默认取值为0.5,pr
pnv
表示上述第一障碍物概率,pr
sph
表示上述第二障碍物概率,pr表示融合概率。此外,上述对第一障碍物概率和第二障碍物概率进行融合的描述仅用于对本实施例进行举例说明,而非用于限定,其他能够对概率进行融合的方法也同样适用于本实施例,此处不作赘述。
[0116]
步骤s402:将所述融合概率大于第二预设阈值的超像素对应的区域确定为所述交通场景图像中的障碍物。
[0117]
应理解的是,上述融合概率综合了上述od-pnv和od-sph两种方法的判断结论,即分别从平面法向量和点云高度的角度分析超像素属于障碍物的概率,从而能够在车辆的引擎盖和轮胎等区域都有足够的区分度,提升了交通场景的障碍物检测结果的准确性。
[0118]
进一步地,基于上述各实施例,在本实施例中,为了对交通场景图像中的障碍物和自由空间进行准确描述,在所述步骤s40之后,还可以包括:
[0119]
步骤s50:对所述交通场景图像中被检测为障碍物对应的超像素进行水平分割,获得棒状像素。
[0120]
可理解的是,上述水平分割指的是对上述交通场景图像中被判断为障碍物的图像区域,按照预设棒状像素宽度进行逐列分割。
[0121]
步骤s60:对所述棒状像素进行视差优化,获得多层棒状像素。
[0122]
在具体实现中,经过步骤s50的水平分割后,在深度上存在很大差异的障碍物仍然有可能被划分在同一个棒状像素内,这种划分方式可能会导致在感官上出现将不同障碍物归为相同障碍物的问题。为了解决该问题,可以对上述棒状像素进行视差优化,得到多层棒状像素从而使得棒状像素能够正确截断。视差优化过程如下:按照从上到下的顺序遍历棒状像素的每一行,计算当前行的视差均值,并判断当前行与上一行视差均值的差值是否在视差优化阈值区间内,当差值超出上述视差优化阈值区间时,在当前位置截断棒状像素。
[0123]
步骤s70:基于所述多层棒状像素确定所述交通场景图像中不同障碍物之间的分界线以及所述障碍物与当前拍摄位置之间的距离。
[0124]
参考图6,图6为本发明交通场景的障碍物检测方法的棒状像素分割结果示意图。
[0125]
如图6(a)所示,在仅经过水平分割后,图中的汽车和建筑物之间的棒状像素未被截断,导致不同障碍物之间没有明显的分界线来进行区分。而如图6(b)所示,经过视差优化后得到的棒状像素在两辆汽车之间以及汽车与建筑物之间产生截断,同一棒状像素所覆盖的区域基本为同一障碍物。
[0126]
需要说明的是,优化后的棒状像素的颜色也反应了不同障碍物距离的远近。因此,优化后的棒状像素能够更加准确的描述交通场景,有利于加深对场景的理解。
[0127]
本实施例对第一障碍物概率和第二障碍物概率进行融合,获得融合概率,然后将融合概率大于第二预设阈值的超像素对应的区域确定为交通场景图像中的障碍物。同时对交通场景图像中被检测为障碍物对应的超像素进行水平分割,获得棒状像素,然后对棒状像素进行视差优化,获得多层棒状像素,最后基于多层棒状像素确定交通场景图像中不同障碍物之间的分界线以及障碍物与当前拍摄位置之间的距离。相较于现有技术中直接采用
未经处理的交通场景图像进行检测,本实施例上述方法能够更准确地描述上述交通场景图像中障碍物的分布,有利于加深对交通场景的理解。
[0128]
此外,本发明实施例还提出一种存储介质,所述存储介质上存储有交通场景的障碍物检测程序,所述交通场景的障碍物检测程序被处理器执行时实现如上文所述的交通场景的障碍物检测方法的步骤。
[0129]
参照图7,图7为本发明交通场景的障碍物检测装置第一实施例的结构框图。
[0130]
如图7所示,本发明实施例提出的交通场景的障碍物检测装置包括:
[0131]
图像处理模块701,用于对获取到的交通场景图像进行预处理,获得超像素点云;
[0132]
第一计算模块702,用于基于所述超像素点云中各超像素的平面法向量获取第一障碍物概率;
[0133]
第二计算模块703,用于基于所述第一障碍物概率和所述超像素点云获取第二障碍物概率;
[0134]
概率融合模块704,用于根据所述第一障碍物概率和所述第二障碍物概率确定所述交通场景图像中的障碍物。
[0135]
本实施例对获取到的交通场景图像进行预处理,获得超像素点云;基于超像素点云中各超像素的平面法向量获取第一障碍物概率;基于第一障碍物概率和超像素点云获取第二障碍物概率;根据第一障碍物概率和第二障碍物概率确定交通场景图像中的障碍物。相比于现有技术将深度信息映射到2d或3d占用网格中,通过寻找被占用的网格找到障碍物区域和可通行区域的最佳分界线,本实施例上述方法提出了基于局部空间特征信息的交通场景的障碍物检测方法,即通过平面法向量特征和高度特征两个角度综合计算局部区域存在障碍物的概率,从而能够将各种交通场景划分为障碍物类和自由空间类,进而提高了交通场景中对障碍物进行检测并提供障碍物具体位置信息的准确性。
[0136]
本发明交通场景的障碍物检测装置的其他实施例或具体实现方式可参照上述各方法实施例,此处不再赘述。
[0137]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0138]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
[0139]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如只读存储器/随机存取存储器、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。
[0140]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。