技术特征:
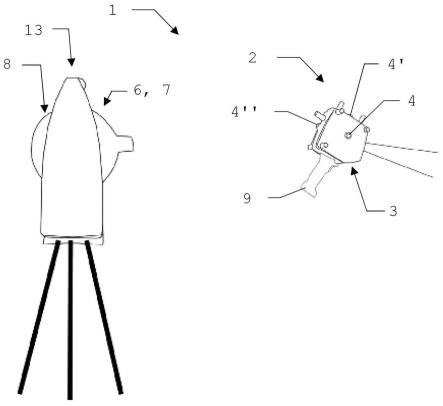
1.一种用于基于激光跟踪器来确定表面的待测点的坐标的测量系统(1),所述测量系统(1)具有:
○
用于扫描所述表面的待测点的测量辅助装置(2、2'、2”)、尤其是激光扫描仪,所述测量辅助装置(2、2'、2”)具有:
○
用于确定所述测量辅助装置的运动数据的惯性测量单元imu(3);
○
反射器(4);以及
○
多个测量辅助标记(5、5'、5”),其中,所述多个测量辅助标记以一定的相互位置关系并形成图案地布置在所述测量辅助装置上,使得所述测量系统能借助所述反射器确定所述测量辅助装置的位置并借助所述测量辅助标记确定所述测量辅助装置的取向,
○
测距模块(6),
○
用于方向可变地发射检测辐射的辐射模块(7),
○
能够对准方向的测量辅助检测单元(8),所述测量辅助检测单元(8)能通信连接到所述测量辅助装置并具有检测视野,其中,所述测量辅助检测单元被配置用于:
○
基于由所述反射器反射的检测辐射来检测并跟踪所述测量辅助装置;
○
检测所述测量辅助标记;以及
○
基于以下条件确定所述表面的待测点的坐标:
■
对所述测量辅助装置的检测和跟踪;
■
对所述测量辅助标记的检测;
■
借助所述测距模块确定的至所述测量辅助装置的距离;以及
■
通过所述测量辅助装置对所述表面的待测点的扫描,其特征在于,
○
所述测量辅助检测单元(8)还被配置成基于由所述imu确定的所述测量辅助装置的运动数据来确定所述表面的待测点的坐标,并且
○
所述测量系统(1)被配置成基于由所述imu确定的所述测量辅助装置的运动数据对准所述测量辅助检测单元,使得所述反射器在所述检测视野内。2.根据权利要求1所述的测量系统,其特征在于,所述测量系统被配置成,使得
○
如果所述反射器(4)在所述检测视野内并且在所述辐射模块(7)、所述测量辅助检测单元(8)和所述反射器之间存在直视连接,则能至少基于由所述反射器反射的检测辐射来检测和跟踪所述测量辅助装置(2、2'、2”),并且
○
如果所述反射器在所述检测视野之外或者在所述辐射模块、所述测量辅助检测单元和所述反射器之间没有直视连接,则能基于由所述imu(3)确定的所述测量辅助装置的运动数据来检测和跟踪所述测量辅助装置。3.根据权利要求2所述的测量系统,其中,所述反射器(4)由多个反射器(4、4'、4”)构成并且所述多个反射器布置在所述测量辅助装置(2、2'、2”)的外侧区域上并以一定的位置关系分布在其上,其特征在于,所述测量系统被配置成,如果在所述多个反射器(4、4'、4”)之一位于所述检测视野内并且在所述辐射模块(7)、所述测量辅助检测单元(8)和所述多个反射器之一之间存在直视连接的第一状态之后是所述多个反射器之一位于所述检测视野之外或者在所
述辐射模块、所述测量辅助检测单元和所述多个反射器之一之间没有直视连接的状态,则基于由所述imu(3)确定的所述测量辅助装置的运动数据来对准所述测量辅助检测单元,使得直至所述多个反射器之一位于所述检测视野内并且在所述辐射模块、所述测量辅助检测单元和所述多个反射器之一之间存在直视连接的时间段被最小化。4.根据权利要求1至3中任一项所述的测量系统,其特征在于,所述测量辅助标记(5、5'、5”)被设计成发射和/或反射光线。5.根据权利要求1至4中任一项所述的测量系统,其中,所述测量辅助检测单元(8)具有带有辐射敏感传感器的检测器,其特征在于,所述测量辅助检测单元被配置成借助所述辐射敏感传感器
○
检测并跟踪所述测量辅助装置(2、2'、2”),并且
○
检测所述测量辅助标记(5、5'、5”)。6.根据权利要求1至5中任一项所述的测量系统,其特征在于,所述测量辅助检测单元(8)被配置成交替确定所述测量辅助装置的位置和取向,为此不仅
○
借助由所述imu(3)确定的所述测量辅助装置(2、2'、2”)的运动数据,而且也
○
借助由以下项构成的组合:
○
借助所述反射器(4);
○
借助所述测量辅助标记(5、5'、5”);以及
○
借助由所述imu确定的所述测量辅助装置的运动数据。7.根据权利要求1至6中任一项所述的测量系统,其特征在于,所述测量辅助检测单元(8)被配置成基于检测标准来确定所述测量辅助装置(2、2'、2”)的取向和位置,为此
○
借助由所述imu(3)确定的所述测量辅助装置的运动数据,或者
○
借助由以下项构成的组合:
○
借助所述反射器(4);
○
借助所述测量辅助标记(5、5'、5”),以及
○
借助由所述imu确定的所述测量辅助装置的运动数据。8.根据权利要求7所述的测量系统,其特征在于,所述检测标准涉及以下状态中的至少一种:
○
所述测量辅助装置(2、2'、2”)能完全借助所述反射器(4)和所述测量辅助标记(5、5'、5”)被检测,
○
所述测量辅助装置能至少部分借助所述反射器和所述测量辅助标记被检测,
○
所述测量辅助装置能至少部分借助所述反射器或所述测量辅助标记被检测,以及
○
在所述反射器和所述测量辅助检测单元之间没有直视连接,并且在所述测量辅助标记与所述测量辅助检测单元之间的视线被中断。9.根据权利要求1至8中任一项所述的测量系统,其特征在于,所述测量辅助检测单元(8)被配置成用于确定所述测量辅助装置(2、2'、2”)的位置和/或取向,为此
○
在第一时刻借助所述反射器(4)和/或所述测量辅助标记(5、5'、5”),并且
○
在第二时刻借助由所述imu(3)确定的运动数据,其中,所述第二时刻的至少一部分在时间上位于所述第一时刻之间。10.根据权利要求1至9中任一项所述的测量系统,其中,所述测量辅助检测单元(8)被
配置成借助所述测量辅助标记(5、5'、5”)和由所述imu(3)确定的运动数据来确定所述测量辅助装置(2、2'、2”)的取向,其特征在于,所述测量辅助检测单元(8)被配置成基于以下条件来确定所述取向:
○
关于第一时间间隔求平均的测量值,以用于借助所述测量辅助标记来确定所述取向,以及
○
关于第二时间间隔求平均的测量值,以用于借助由所述imu确定的运动数据来确定所述取向。11.根据权利要求1至10中任一项所述的测量系统,其特征在于,所述测量辅助检测单元(8)还被配置成基于借助所述反射器(4)和所述测量辅助标记(5、5'、5”)确定的位置和取向来连续校准借助所述imu(3)确定的运动数据。12.根据权利要求1至11中任一项所述的测量系统,其特征在于,所述测量系统被配置成基于借助所述imu(3)确定的运动数据来识别所述测量辅助装置(2、2'、2”)接近具有一定位置和形状的障碍。13.根据权利要求12所述的测量系统,其特征在于,所述测量系统被配置成如果尤其在一定时间段内在所述反射器(4)、所述辐射模块和所述测量辅助检测单元(8)之间没有直视连接,则自动触发对接近的识别。14.根据权利要求13所述的测量系统,其特征在于,所述测量系统被配置成通过光学和/或声学和/或触觉反馈向所述测量辅助装置(2、2'、2”)的使用者发信号表示识别出接近。15.根据权利要求1至14中任一项所述的测量系统,其特征在于,
○
所述测量辅助装置(2、2'、2”)是激光扫描仪,并且
○
所述辐射模块、所述测距模块和所述测量辅助检测单元(8)是激光跟踪仪(13)的一部分。
技术总结
本发明涉及带有惯性测量单元的基于激光跟踪仪的测量系统,尤其涉及一种具有测量辅助装置的基于激光跟踪器的测量系统,该测量辅助装置具有惯性测量单元(IMU)。该测量系统被设计用于确定借助测量辅助装置扫描的表面点的坐标。坐标。坐标。
技术研发人员:M
受保护的技术使用者:莱卡地球系统公开股份有限公司
技术研发日:2022.09.02
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。