1.本发明属于传播交通控制技术领域,涉及一种船舶跟驰模型的构建方法及应用。
背景技术:
2.随着水路货运量,港口吞吐量及航道里程的不断增加,也引发了航道拥堵,航道通行效率降低,海上交通事故频发等问题,使得对航道内交通态势的分析与判断能力提出了更高的要求。为了能够有效地描述水上交通的交通流特性,解释宏观的交通流现象,计算航道的通过能力,目前采用构建船舶的跟驰模型来指导船舶的行驶。
3.现有技术中的海上跟驰模型普遍以车辆跟驰模型为基础,通过修改模型的数据将其应用于水上交通,但是没有充分地考虑船舶运行的机理以及海上交通的环境特性,所以无法准确高效地描述海上交通现象,解决交通问题。另一方面,由于船舶在航道中受交通管制的影响,船舶没有达到最佳的行驶速度,导致航道的通过能力较低,基于实际ais数据绘制的交通流散点图中也可以看出,如图1所示,处于最佳速度、最大通行能力以及阻塞部分的数据无法绘制。
技术实现要素:
4.本发明的目的是提供一种基于场论的船舶跟驰模型,以克服现有海上跟驰模型无法准确高效地描述海上交通现象的问题。
5.本发明的目的可以通过以下技术方案来实现:
6.一种船舶跟驰模型的构建方法,包括以下步骤:
7.获取后船在物理场中的航行动力和航行阻力,进而获得驾驶员的未满足操纵欲望;
8.基于船舶的运行机理,后船在缓慢停船情况下产生停船冲程、前船在急刹停船情况下产生倒船冲程,根据停船冲程和到船冲程构建理想船首间距公式;
9.当后船靠近前船时,根据理想船首间距和实际船首间距的差值,得到距离作用力;
10.根据未满足操纵欲望和距离作用力获得船舶跟驰模型。
11.进一步地,所述的船舶跟驰模型的表达式为:
[0012][0013]
式中,fi为船舶在物理场中所受合力,g
i-ri为驾驶员的未满足操纵欲望,gi为航行动力,ri为航行阻力,为距离作用力,i表示后船,j表示前船。
[0014]
进一步地,所述的驾驶员未满足的操纵欲望包括以下情况:
[0015]
当船舶处于静止状态或者减速状态,g
i-ri为正值,驾驶员的操纵欲望不满足;
[0016]
当船舶处于加速状态,g
i-ri逐渐减小,驾驶员的操纵欲望逐渐满足,直至g
i-ri=0,此时,驾驶员的操纵欲望得到满足。
[0017]
进一步地,所述的航行动力的计算公式为:
[0018]gi
=m
iai
[0019]
式中gi为航行动力,mi为船舶的质量,ai为船舶在航道中行驶的最大加速度,i表示后船。
[0020]
进一步地,所述的航行阻力的计算公式为:
[0021][0022]
式中ri为航行阻力,表示船舶的实际行驶速度,vi表示船舶的理想行驶速度,i表示后船。
[0023]
进一步地,所述的理想船首间距公式为:
[0024][0025]
其中,γ是货种安全系数,s2为后船在缓慢停船情况下产生的停车冲程,s1为前船在急刹停船情况下产生的倒车冲程,s
t
为后船在反应时间内航行的距离,lj为有效船长,i表示后船,j表示前船。
[0026]
进一步地,所述的后船在反应时间内航行的距离s
t
的计算公式为:
[0027]st
=v2τ
[0028]
其中,s
t
代表后船在反应时间内航行的距离,τ表示后船的反应时间。
[0029]
进一步地,所述的有效船长的计算公式为:
[0030]
lj=li sm[0031]
式中,lj为有效船长,li为船舶长度,sm为安全余量。
[0032]
进一步地,所述的距离作用力的计算公式为:
[0033][0034]
式中为船舶距离作用力,为船舶的侵入距离,s
ij
为船首间距,为理想船首间距,b为校准参数,i表示后船,j表示前船。
[0035]
一种船舶跟驰的模拟方法,通过使用权利要求1~9中任一项所述的船舶跟驰模型的构建方法,建立船舶跟驰模型,将航行速度、密度和流量作为变量,得到交通流基本图,根据交通流基本图上峰值点,确定最佳航速、最佳密度和最佳通行能力,进而实现模拟船舶跟驰。
[0036]
与现有技术相比,本发明具有以下特点:
[0037]
1.本发明通过航行动力和航行阻力获得驾驶员的未满足操纵欲望,作为船舶航行时受到的吸引力,其中,航行阻力考虑了海上交通规则,根据船舶的运行机理,通过构建理想船首间距公式,当后船靠近前船时,根据理想船首间距和实际船首间距的差值,得到距离作用力,作为船舶航行时受到的排斥力,根据未满足操纵欲望和距离作用力构建船舶跟驰模型,与现有技术相比,本发明从微观角度对船舶所受的非接触力进行分析,可以准确地模拟船舶跟驰情况。
[0038]
2.本发明通过未满足操纵欲望引入驾驶员的理想速度,所述理想速度作为主观意愿,可以通过采用调查问卷的方式获得,不受航道交通规则的影响,基于该模型,可以绘制
出完整的水上交通流基本图,进而获得最佳密度、最佳航速和最大通行能力,提高通航效率。
附图说明
[0039]
图1为基于实际ais数据绘制的交通流散点图,其中,(1a):本发明速度与密度关系的交通流散点图;(1b):本发明速度与流量关系的交通流散点图;(1c):本发明流量与密度关系的交通流散点图;
[0040]
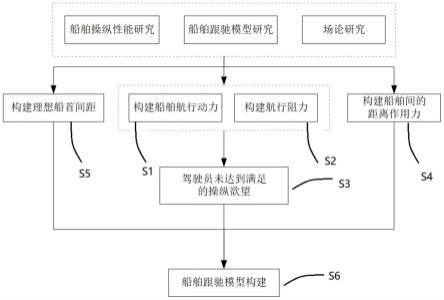
图2为本发明船舶跟驰模型构建方法流程图;
[0041]
图3为本发明船舶在物理场中的非接触力受力图;
[0042]
图4为本发明船舶纵向物理场的示意图;
[0043]
图5为本发明船舶理想船首间距;
[0044]
图6为本发明交通流基本图;(6a):本发明交通流速度和密度关系图;(6b):本发明交通流速度和流量关系图;(6c):本发明交通流密度和流量关系图。
具体实施方式
[0045]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0046]
实施例1
[0047]
本发明提出一种船舶跟驰模型的构建方法,首先,该模型考虑船舶在水上交通流中受到一种“重力”的作用,该重力为驾驶员所感知的主观存在的力。就像自由落体运动,由于重力的作用,按照事先确定的方向来流动,船舶也是受到该力的作用在航道中行驶,称此力为航行动力。其次,该模型考虑驾驶员的操纵欲望,其意为驾驶员在行驶中想按照自己的意愿以理想的速度行驶,但航道中的交通规则对其形成了阻力,从而形成的未得到满足的操纵欲望。最后,考虑船舶之间的距离作用力,是由驾驶员感知周围的船舶和障碍物,通过非接触式的一种场来表示,场中的船舶基于船首间距的大小,所受到的力各不相同。基于以上三方面,充分考虑船舶在微观的物理场中所受到的力,建立船舶的跟驰模型。
[0048]
见图2,该方法包括以下步骤:
[0049]
步骤s1、构建船舶行驶的航行动力gi。
[0050]
在物理学中,物体的自由落体运动是指物体受到重力的作用,沿着重力的方向进行运动,将此概念应用于水上交通流中,交通流也是按照特定的方向进行运动的。由此得出,船舶在交通流中行驶时,也是受到一种类似于重力的作用力的影响,本发明将该力称为船舶的航行动力gi,其是一种存在于驾驶员头脑中的主观的作用力,是受到驾驶员的特性,航道的环境和船舶的特性影响。本发明将这种类似的重力中的加速度用船舶在航行时的最大加速度表示。
[0051]
步骤s2、构建驾驶员在航行时感知的阻力ri。
[0052]
当船舶在航道中行驶时,交通法规(例如限速)会使驾驶员产生一种心理上的阻力ri,当驾驶员加速行驶时,由于速度越来越接近交通法规的限速,驾驶员内心感受到的阻力随之越来越大,因此该力与行驶的实际速度和驾驶员的理性速度有关。
[0053]
步骤s3、构建驾驶员未达到满足的操纵欲望表达式。
[0054]
将上述步骤所建立的航行动力与驾驶员感受到的主观阻力进行联立,并由牛顿第二定律可得航行动力g
i-阻力ri=ma,本发明将上述所建立的方程表示为驾驶员未达到满足的操纵欲望,同时该表达式也表达为船舶在物理场中的吸引项。方程左边的合力在船舶处于静止时为最大值,此时驾驶员想操纵的欲望达到最大;随着行驶速度的增大,使得其大小逐渐接近交通法规的限速值,此时的阻力也随之逐渐增大,使得方程左边的合力逐渐减小,驾驶员的操纵欲望逐渐得到满足;当行驶速度达到限速时,合力为零,驾驶员的操纵欲望达到满足。
[0055]
步骤s4、构建船舶物理场中的距离作用力
[0056]
船舶在行驶的过程中,驾驶员能够感知到周围行驶的船舶和障碍物,并对此做出相应的减速或换道行为,本文将这种驾驶员主观感受到的非接触信息的传递理解为通过场u
i,x
来完成的,也就是船舶和障碍物形成的由自身特性所决定的空间。该场的分界线是由跟驰时前导船舶的理想船头间距决定的。当船舶侵入到该场中,将会受到一种排斥力该力的是由场u
i,x
在x轴方向上的偏导表示:
[0057][0058]
其中,i表示后船,j表示前船。
[0059]
步骤s5、构建理想船首间距公式。
[0060]
理想船首间距与船舶航速,船舶间的最小船头距离,驾驶员的反应时间,前船与后船采用的停船方式以及船舶的制动性能有关,本发明采用通常情况下船舶的停船过程建立理想船首间距公式。
[0061]
通常情况下,前船急刹停船时,后船会采用缓慢停船的方式,在这种情况下,理想船首间距公式会包含前船急刹时产生的倒车冲程,后船缓慢停船时产生的停车冲程,后船驾驶员在反应时间内操控船舶行驶的距离,船舶尺度以及两船停船后保持的最小安全余量,本发明对船舶尺度以及最小安全余量所组成的距离称为有效船长。
[0062]
步骤s6、基于以上五部分整合得出完整的船舶跟驰模型。
[0063]
本发明所构建的基于场论的船舶跟驰模型是从跟驰行为入手,考虑的是船舶在纵向上的控制,本发明将驾驶员感知到的驾驶环境,包括航道,交通管制,其他船舶等,表示为一个总体的场ui。因此驾驶员在行驶中将受到该场中的各部分作用力,这些力是作用在驾驶员心理上的主观的作用力,包括驾驶员在交通流中行驶的航行动力gi、驾驶员对于交通法规限制航行产生的阻力ri以及船舶间的距离作用力基于上述三部分力,根据牛顿第二定律公式,整理可得:
[0064][0065]
在具体的应用中,如图3所示为船舶在物理场中受到的各部分非接触力示意图,据此进行各部分力的构建:
[0066]
1:构建船舶行驶的航行动力gi。该力是基于物理场中的重力而得出,例如自由落体运动是受到重力的作用,重力的表达式为:g=mg;当船舶在航道行驶时,也是按照事先确
定好的方向运动,其受到的力与重力相似,于是本文将重力中的加速度用船舶在航道中行驶的最大加速度表示,具体公式如下:
[0067]gi
=m
iai
[0068]
其中,gi表示船舶在航道中所受到的重力,称为驾驶动力;mi表示船舶的质量,单位为t;ai代表船舶在航道中行驶的最大加速度,单位为m/s2。
[0069]
2:构建驾驶员在航行时的感知阻力ri。该力是由船舶在航道中行驶所受到的交通管制(例如限速)形成的阻力,并且与驾驶员主观感知到的实际速度和理想速度有关。
[0070]
3:构建驾驶员的操纵欲望表达式。当驾驶员可以按照理想的速度行驶时,其操纵欲望达到100%,但由于船舶的交通管制所引起的限速等使得驾驶员无法达到满足的操纵欲望,那么从物理场的角度分析,在某一时刻的驾驶员的操纵欲望表示为此时实际速度与理想速度的比值:
[0071][0072]
其中,mi(t)表示在t时刻驾驶员的操纵欲望;表示在t时刻船舶的实际行驶速度;vi表示驾驶员的理想行驶速度。
[0073]
4:基于上述三步骤构建驾驶员未达到满足的操纵欲望表达式。具体公式如下:
[0074][0075]
其中g
i-ri表示驾驶员未达到满足的操纵欲望;δ表示校准参数。
[0076]
当船舶在航道中静止时,g
i-ri是正值且数值较大,驾驶员对于船舶的行驶速度未能达到满足的欲望是最大的;当船舶加速时,g
i-ri的数值相应减小,驾驶员的操纵欲望一点点达到满足,直到实际行驶速度等于理想行驶速度时欲望达到满足,此时g
i-ri=0;当驾驶员的欲望过于满足时,即实际速度大于理想速度,表达式g
i-ri会小于0,使得船舶行驶速度回到理想速度数值内,从而达到控制船舶行驶的目的。
[0077]
5:构建船舶物理场中的距离作用力。该力的分布如图4所示。当后船以极快的速度靠近前面行驶缓慢的船舶时会受到由前船形成的一种基于自身属性的安全场,对于跟驰行为而言,场中的主要作用力为船舶间距离作用力。该力属于一种非接触作用力,其大小是由船首间距s
ij
决定的。例如,当跟驰船距离前导船很远的距离时,该力对跟驰船的作用很小;当跟驰船逐渐接近前导船时,该力随着距离的缩小而增大,直到两船间的距离达到最小安全距离时该力达到最大值。本专利选用一种指数函数的形式对该力的大小进行表示。此外,该力还与船舶的制动性能,两船速度和相对速度有关,以上因素加入到理想船首间距中表示。
[0078]
将理想船首间距设为基准线,当后船超过基准线侵入到理想船首间距之内时,它将受到一种排斥力,即船舶距离作用力。具体公式为:
[0079][0080]
其中,表示后船在场中的侵入距离。
[0081]
6:构建理想船首间距公式。该公式中包含前船在急刹停船情况下产生的倒车冲
程,后船在缓慢停船情况下产生的停车冲程,后船的反应距离以及有效船长。各部分具体关系如图5所示。
[0082]
前船在急刹停船情况下产生的倒车冲程具体公式为:
[0083][0084]
其中,s1表示前船在急刹停船情况下产生的倒车冲程;v1表示前船船速,单位为m/s;
[0085]
w表示船舶的满载排水量,单位为t;k
x
表示船舶前进方向虚质量系数,可经实验取得;g代表重力加速度,其大小为9.8m/s2;t
p
表示螺旋桨倒车拉力t,可用0.01n
p
(倒车功率)来估算。
[0086]
后船在缓慢停船情况下产生的停车冲程具体公式为:
[0087]
s2=0.024cv2[0088]
其中,s2表示后船在缓慢停船情况下产生的停车冲程;v2表示后船船速,单位为m/s;
[0089]
c表示船速减半时间常数(min),与排水量相关。
[0090]
后船的反应距离公式为:
[0091]st
=v2τ
[0092]
其中,s
t
代表后船在反应时间内航行的距离,单位为m;τ表示后船的反应时间,单位为s,经统计获得。
[0093]
有效船长公式为:
[0094]
lj=li sm[0095]
其中,lj表示有效船长,单位为m;li表示船舶长度,单位为m;sm表示安全余量,一般取后船的一倍船长,单位m。
[0096]
整理上述部分,得到完整的理想船首间距公式为:
[0097][0098]
其中,表示理想船首间距,γ货种安全系数,集装箱、散货和杂货船取1.0,成品油船取1.5。
[0099]
7:基于上述部分整合得出完整的船舶跟驰模型。其公式表示为:
[0100][0101]
将理想船首间距公式代入,同时公式两边消去质量mi,得到的公式如下:
[0102][0103]
其中,b为校准参数。
[0104]
8:在稳态的情况下,所有车辆的行为都趋于相同,因此本实施例忽略个体船舶的差别。因此,在稳态条件下,车辆会失去特征值(例如:τi→
τ),车辆以等速行驶(例如
),驾驶员的期望速度收敛于道路上的自由流动速度(例如vi→
vf)。将上述微观模型整合为相应的宏观模型:
[0105][0106]
其中
[0107]
根据船舶跟驰模型,得到交通流基本图,见图6,qm表示最大通行能力,vm表示最佳航速,km表示最佳密度,因此可以提高通航效率。
[0108]
本发明设计了一种基于场论的船舶跟驰模型,通过分析船舶在场中所受到的主观的非接触力,包括船舶在水上交通流中受到的航行动力;驾驶员的操纵欲望,其意为驾驶员在行驶中总想按照自己的意愿以理想的速度行驶,但航道中的交通规则对其形成了阻力,从而形成的未得到满足的操纵欲望;船舶之间的距离作用力,驾驶员感知周围的船舶和障碍物多带来的主观作用力。基于上述物理场中的作用力构建的船舶跟驰模型,可以从船舶的运行机理出发,绘制出完整的水上交通流基本图,从而得到最佳密度,最佳航速,最大通行能力,以此来实现对船舶进出航道的管控,对航道交通流量进行控制,保障船舶通航安全,提高通航效率。
[0109]
实施例2
[0110]
一种船舶跟驰的模拟方法,通过使用船舶跟驰模型的构建方法,建立船舶跟驰模型,将航行速度、密度和流量作为变量,得到交通流基本图,根据交通流基本图上峰值点,确定最佳航速、最佳密度和最佳通行能力,进而实现模拟船舶跟驰,达到提高航道通航效率的目的,所述的船舶跟驰模型的构建方法与实施例1相同。
[0111]
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。