技术特征:
1.一种车道线识别模型的训练方法,包括:获取多组训练样本;其中,每组训练样本包括道路的反射值底图样本以及采集所述反射值底图样本的采集设备的轨迹,所述反射值底图样本标注有车道线标注信息;对于每组训练样本,沿所述采集设备的轨迹从所述反射值底图样本中截取反射值图像块,并将所述反射值图像块输入车道线识别模型,以由所述车道线识别模型根据所述反射值图像块识别所述反射值底图样本中的车道线识别结果;根据所述车道线识别结果和所述车道线标注信息确定损失误差,并根据所述损失误差调整所述车道线识别模型的模型参数。2.根据权利要求1所述的车道线识别模型的训练方法,其中,所述车道线识别模型包括特征提取层和输出层;所述根据所述车道线识别模型预测所述反射值底图样本的车道线识别结果,包括:触发所述特征提取层从所述反射值图像块中提取图像特征和各个反射值图像块之间的关联特征,并根据所述图像特征和所述关联特征得到至少两个特征图层;触发所述输出层根据所述至少两个特征图层预测所述车道线识别结果。3.根据权利要求2所述的车道线识别模型的训练方法,其中,所述触发所述输出层根据所述至少两个特征图层预测所述车道线识别结果,包括:触发所述输出层沿所述特征图层的行方向计算第一车道线信息,沿所述特征图层的列方向计算第二车道线信息;根据所述第一车道线信息和所述第二车道线信息预测所述车道线识别结果。4.根据权利要求2所述的车道线识别模型的训练方法,其中,所述触发所述输出层根据所述至少两个特征图层预测所述车道线识别结果,包括:触发所述输出层从所述至少两个特征图层中挑选目标层的特征图层;根据所述目标层的特征图层预测所述车道线识别结果。5.根据权利要求2所述的车道线识别模型的训练方法,其中,所述损失误差包括车道线包含的点的位置损失函数值、点沿行方向的损失函数值、点沿列方向的损失函数值、点长度的损失函数值的加权结果。6.根据权利要求1-5中任一项所述的车道线识别模型的训练方法,其中,每张反射值底图样本根据所述道路的多组点云数据得到;采集各组点云数据的采集设备的轨迹相同。7.一种车道线识别方法,包括:获取待识别的反射值底图和采集所述反射值底图的采集设备的轨迹;对沿所述采集设备的轨迹从所述反射值底图中截取反射值图像块,并将所述反射值图像块输入训练得到的车道线识别模型,以由所述车道线识别模型根据所述反射值图像块识别所述反射值底图中的车道线识别结果;其中,所述车道线识别模型基于多组训练对初始的车道线识别模型训练得到,每组训练包括道路的反射值底图以及采集所述反射值底图的采集设备的轨迹,所述反射值底图标注有车道线标注信息。8.根据权利要求7所述的车道线识别方法,其中,所述车道线识别模型包括特征提取层和输出层;所述根据所述车道线识别模型预测所述反射值底图的车道线识别结果,包括:触发所述特征提取层从所述反射值图像块中提取图像特征和各个反射值图像块之间
的关联特征,并根据所述图像特征和所述关联特征得到至少两个特征图层;触发所述输出层根据所述至少两个特征图层预测所述车道线识别结果。9.根据权利要求8所述的车道线识别方法,其中,所述触发所述输出层根据所述至少两个特征图层预测所述车道线识别结果,包括:触发所述输出层沿所述特征图层的行方向计算第一车道线信息,沿所述特征图层的列方向计算第二车道线信息;根据所述第一车道线信息和所述第二车道线信息预测所述车道线识别结果。10.根据权利要求8所述的车道线识别方法,其中,所述触发所述输出层根据所述至少两个特征图层预测所述车道线识别结果,包括:触发所述输出层从所述至少两个特征图层中挑选目标层的特征图层;根据所述目标层的特征图层预测所述车道线识别结果。11.根据权利要求7-10中任一项所述的车道线识别方法,其中,所述反射值底图根据所述道路的多组点云数据得到;采集各组点云数据的采集设备的轨迹相同。12.一种车道线识别模型的训练装置,包括:获取模块,用于获取多组训练样本;其中,每组训练样本包括道路的反射值底图样本以及采集所述反射值底图样本的采集设备的轨迹,所述反射值底图样本标注有车道线标注信息;预处理模块,用于对于每组训练样本,沿所述采集设备的轨迹从所述反射值底图样本中截取反射值图像块,并将所述反射值图像块输入车道线识别模型,以由所述车道线识别模型根据所述反射值图像块识别所述反射值底图样本中的车道线识别结果;训练模型,用于根据所述车道线识别结果和所述车道线标注信息确定损失误差,并根据所述损失误差调整所述车道线识别模型的模型参数。13.根据权利要求12所述的车道线识别模型的训练装置,其中,所述车道线识别模型包括特征提取层和输出层;所述特征提取层用于从所述反射值图像块中提取图像特征和各个反射值图像块之间的关联特征,并根据所述图像特征和所述关联特征得到至少两个特征图层;所述输出层用于根据所述至少两个特征图层预测所述车道线识别结果。14.根据权利要求13所述的车道线识别模型的训练装置,其中,所述输出层具体用于:沿所述特征图层的行方向计算第一车道线信息,沿所述特征图层的列方向计算第二车道线信息;根据所述第一车道线信息和所述第二车道线信息预测所述车道线识别结果。15.根据权利要求13所述的车道线识别模型的训练装置,其中,所述输出层具体用于:触发所述输出层从所述至少两个特征图层中挑选目标层的特征图层,并根据所述目标层的特征图层预测所述车道线识别结果。16.根据权利要求13所述的车道线识别模型的训练装置,其中,所述损失误差为车道线包含的点的位置损失函数值、点沿行方向的损失函数值、点沿列方向的损失函数值、点长度的损失函数值的加权结果。17.根据权利要求12-16中任一项所述的车道线识别模型的训练装置,其中,每张反射值底图样本根据所述道路的多组点云数据得到;采集各组点云数据的采集设备的轨迹相
同。18.一种车道线识别装置,包括:获取模块,用于获取待识别的反射值底图和采集所述反射值底图的采集设备的轨迹;识别模块,用于对沿所述采集设备的轨迹从所述反射值底图中截取反射值图像块,并将所述反射值图像块输入训练得到的车道线识别模型,以由所述车道线识别模型根据所述反射值图像块识别所述反射值底图中的车道线识别结果;其中,所述车道线识别模型基于多组训练对初始的车道线识别模型训练得到,每组训练包括道路的反射值底图以及采集所述反射值底图的采集设备的轨迹,所述反射值底图标注有车道线标注信息。19.根据权利要求18所述的车道线识别装置,其中,所述车道线识别模型包括特征提取层和输出层;所述特征提取层用于从所述反射值图像块中提取图像特征和各个反射值图像块之间的关联特征,并根据所述图像特征和所述关联特征得到至少两个特征图层;所述输出层用于根据所述至少两个特征图层预测所述车道线识别结果。20.根据权利要求19所述的车道线识别装置,其中,所述输出层具体用于:沿所述特征图层的行方向计算第一车道线信息,沿所述特征图层的列方向计算第二车道线信息;根据所述第一车道线信息和所述第二车道线信息预测所述车道线识别结果。21.根据权利要求19所述的车道线识别装置,其中,所述输出层具体用于:触发所述输出层从所述至少两个特征图层中挑选目标层的特征图层;根据所述目标层的特征图层预测所述车道线识别结果。22.根据权利要求18-21中任一项所述的车道线识别装置,其中,所述反射值底图根据所述道路的多组点云数据得到;采集各组点云数据的采集设备的轨迹相同。23.一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-11中任一项所述的方法。24.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-11中任一项所述的方法。25.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-11中任一项所述的方法。
技术总结
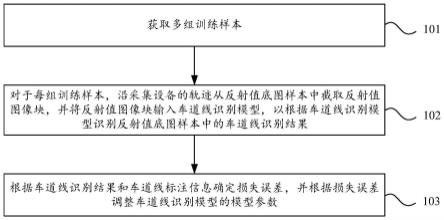
本公开提供了车道线识别及模型的训练方法、装置、设备、介质,涉及自动驾驶、智能交通和高精地图技术领域,尤其涉及高精地图数据处理技术领域。车道线识别模型的训练方法的具体实现方案为:获取多组训练样本;其中,每组训练样本包括道路的反射值底图样本以及采集反射值底图样本的采集设备的轨迹,反射值底图样本标注有车道线标注信息;对于每组训练样本,沿采集设备的轨迹从反射值底图样本中截取反射值图像块,并将反射值图像块输入车道线识别模型,以由车道线识别模型根据反射值图像块识别反射值底图样本中的车道线识别结果;根据车道线识别结果和车道线标注信息确定损失误差,并根据损失误差调整车道线识别模型的模型参数。根据损失误差调整车道线识别模型的模型参数。根据损失误差调整车道线识别模型的模型参数。
技术研发人员:朱丽娟 孙增怡 卢维欣 万国伟 白宇
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:2022.11.30
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。