技术特征:
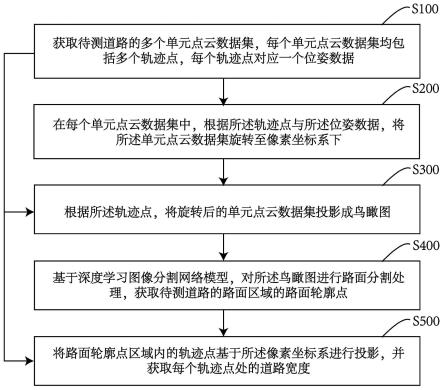
1.一种基于深度学习的道路宽度信息提取方法,其特征在于,包括以下步骤:获取待测道路的多个单元点云数据集,每个单元点云数据集均包括多个轨迹点,每个轨迹点对应一个位姿数据;在每个单元点云数据集中,根据所述轨迹点与所述位姿数据,将所述单元点云数据集旋转至像素坐标系下;根据所述轨迹点,将旋转后的单元点云数据集投影成鸟瞰图;基于深度学习图像分割网络模型,对所述鸟瞰图进行路面分割处理,获取待测道路的路面区域的路面轮廓点;将路面轮廓点区域内的轨迹点基于所述像素坐标系进行投影,并获取每个轨迹点处的道路宽度。2.如权利要求1所述的基于深度学习的道路宽度信息提取方法,其特征在于,所述“在每个单元点云数据集中,根据所述轨迹点与所述位姿数据,将所述单元点云数据集旋转至像素坐标系下”步骤,具体包括以下步骤:在每个单元点云数据集中,选取所有轨迹点中的中心轨迹点;根据所述位姿数据,获取所述中心轨迹点的位姿角;根据中心轨迹点所处图像的像素坐标系,并基于位姿角的旋转矩阵,将所述单元点云数据集旋转至像素坐标系下。3.如权利要求2所述的基于深度学习的道路宽度信息提取方法,其特征在于,所述“根据所述轨迹点,将旋转后的单元点云数据集投影成鸟瞰图”步骤,具体包括以下步骤:以中心轨迹点为投影中心,并基于预设投影分辨率将旋转后的点云数据投影成鸟瞰图。4.如权利要求3所述的基于深度学习的道路宽度信息提取方法,其特征在于,所述“将路面轮廓点区域内的轨迹点基于所述像素坐标系进行投影,并获取每个轨迹点处的道路宽度”步骤,具体包括以下步骤:将路面轮廓点区域内的轨迹点基于所述像素坐标系进行投影;获取每个轨迹点与待测道路两侧的两个像素距离;根据两个所述像素距离与所述预设投影分辨率,获取每个轨迹点处的道路宽度。5.如权利要求4所述的基于深度学习的道路宽度信息提取方法,其特征在于,所述“根据两个所述像素距离与所述预设投影分辨率,获取每个轨迹点处的道路宽度”步骤,具体包括以下步骤:根据两个像素距离l1、l2,预设投影分辨率r;获取每个轨迹点处的道路宽度l为:l=(l1 l2)*r。6.一种基于深度学习的道路宽度信息提取系统,其特征在于,包括:数据获取模块,用于获取待测道路的多个单元点云数据集,每个单元点云数据集均包括多个轨迹点,每个轨迹点对应一个位姿数据;数据旋转模块,与所述数据获取模块通信连接,用于在每个单元点云数据集中,根据所述轨迹点与所述位姿数据,将所述单元点云数据集旋转至像素坐标系下;投影模块,与所述数据获取模块及所述数据旋转模块通信连接,用于根据所述轨迹点,
将旋转后的单元点云数据集投影成鸟瞰图;深度学习模块,与所述投影模块通信连接,用于基于深度学习图像分割网络模型,对所述鸟瞰图进行路面分割处理,获取待测道路的路面区域的路面轮廓点;道路宽度获取模块,与所述数据获取模块及所述深度学习模块通信连接,用于将路面轮廓点区域内的轨迹点基于所述像素坐标系进行投影,并获取每个轨迹点处的道路宽度。7.如权利要求6所述的基于深度学习的道路宽度信息提取系统,其特征在于,所述数据旋转模块,用于在每个单元点云数据集中,选取所有轨迹点中的中心轨迹点;根据所述位姿数据,获取所述中心轨迹点的位姿角;根据中心轨迹点所处图像的像素坐标系,并基于位姿角的旋转矩阵,将所述单元点云数据集旋转至像素坐标系下。8.如权利要求7所述的基于深度学习的道路宽度信息提取系统,其特征在于,所述投影模块,用于以中心轨迹点为投影中心,并基于预设投影分辨率将旋转后的点云数据投影成鸟瞰图。9.如权利要求8所述的基于深度学习的道路宽度信息提取系统,其特征在于,所述道路宽度获取模块,用于将路面轮廓点区域内的轨迹点基于所述像素坐标系进行投影;获取每个轨迹点与待测道路两侧的两个像素距离;根据两个所述像素距离与所述预设投影分辨率,获取每个轨迹点处的道路宽度。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5中任一项所述的基于深度学习的道路宽度信息提取方法。
技术总结
本发明公开了一种基于深度学习的道路宽度信息提取方法、系统及介质,其方法包括以下步骤:获取待测道路的多个单元点云数据集,每个单元点云数据集均包括多个轨迹点,每个轨迹点对应一个位姿数据;在每个单元点云数据集中,根据所述轨迹点与所述位姿数据,将所述单元点云数据集旋转至像素坐标系下;根据所述轨迹点,将旋转后的单元点云数据集投影成鸟瞰图;基于深度学习图像分割网络模型,对所述鸟瞰图进行路面分割处理,获取待测道路的路面区域的路面轮廓点;将路面轮廓点区域内的轨迹点基于所述像素坐标系进行投影,并获取每个轨迹点处的道路宽度;能基于深度学习对道路宽度信息进行自动化提取。息进行自动化提取。息进行自动化提取。
技术研发人员:刘春成 陈操 李汉玢 尹玉成 刘奋
受保护的技术使用者:武汉中海庭数据技术有限公司
技术研发日:2022.11.16
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。