技术特征:
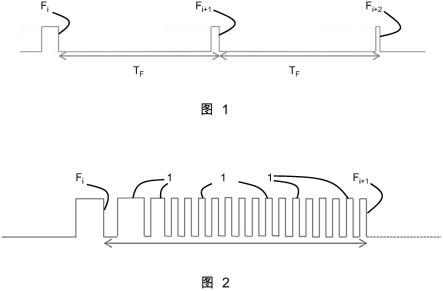
1.一种具有闭环曝光控制的光学距离传感器,包括:光源(3),用于生成照明光束(8)并且用于将所述照明光束(8)引导至被测物体(10),检测器(4),用于检测已由所述照明光束(8)在所述被测物体(10)上的反射引起的测量光束(11),测量控制器(5),用于在检测到所述测量光束(11)时和在读出测量值时控制所述检测器(4),评估单元(6),其被设计成出于确定所述距离传感器(2)和所述被测物体(10)之间的距离(a)的目的在测量操作(14)的一个阶段中评估所述检测器(4)的测量值,以及闭环控制器(7),其驱动所述光源(3)、所述检测器(4)和/或所述测量控制器(5),使得在快门时间期间由所述检测器(4)或所述检测器(4)的一部分检测的接收的光量位于目标范围内或接近所述目标范围,其中,所述距离传感器(2)被设计成在所述测量操作(14)的各阶段中和在所述测量操作(14)的各阶段之间形成的测量间歇两者中都发射所述照明光束(8),并且检测测量光束(11),并且借助于所述闭环控制器(7)评估后者。2.根据权利要求1所述的距离传感器,其特征在于,所述测量控制器(5)被设计成以恒定的时间间隔(t
frame
)提示所述检测器(4)的测量值的读出。3.根据权利要求1或2所述的距离传感器,其特征在于,所述测量控制器(3)被设计成根据快门时间来定义在其处开始检测测量光束(11)的曝光起始。4.根据权利要求1至3之一所述的距离传感器,其特征在于,用于闭环控制所接收的光量的所述闭环控制器(7)被设计成影响所述照明光束(8)的强度、所述照明光束(8)的脉冲历时、所述检测器(4)的曝光起始和/或所述检测器(4)的所述快门时间。5.根据权利要求1至4之一所述的距离传感器,其特征在于,所述距离传感器(2)包括读出存储器(12),所述读出存储器(12)被设计成存储所述检测器(4)的读出测量值,其中模数转换器能被布置在所述检测器(4)和所述读出存储器(12)之间。6.根据权利要求1至5之一所述的距离传感器,其特征在于,所述检测器(4)包括多个检测器元件,其中,所述检测器元件优选地布置成一行或在一区域中,并且其中,为其确定接收的光量的部分能由检测器元件形成。7.一种用于闭环控制光学距离传感器的方法,所述光学距离传感器优选地是根据权利要求1至6之一的距离传感器,其中所述距离传感器(2)包括光源(3)和检测器(4),并且其中在测量操作的各阶段中借助于所述距离传感器(2)来确定到被测物体(10)的距离,所述方法包括以下步骤:从所述光源(3)生成照明光束(8)并将所述照明光束(3)引导到被测物体(10)上,借助于所述检测器(4),检测由所述照明光束(8)在所述被测物体(10)上的反射引起的测量光束(11),读出所述检测器(4)的测量值,其中所述读出由测量控制器(5)控制,确定在快门时间期间由所述检测器(4)或所述检测器(4)的一部分检测的接收的光量,其中,在所述测量操作(14)的各阶段中和在所述测量操作(14)的各阶段之间形成的测量间歇两者中,都生成照明光束(8)并将其引导至所述被测物体(10),并且借助于闭环控制器(7)检测和评估测量光束(11),
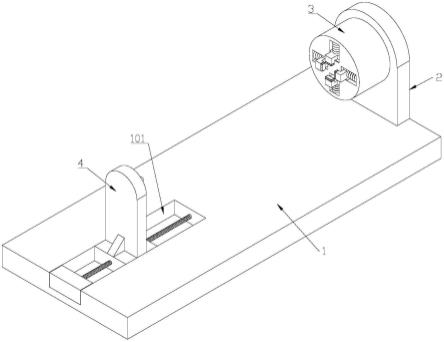
其中以这样的方式借助于所述闭环控制器(7)驱动所述光源(3)、所述检测器(4)和/或所述测量控制器(5),使得接收的光量在目标范围内或接近所述目标范围。8.根据权利要求7所述的方法,其特征在于,在测量操作(14)的两个连续阶段之间执行至少一个中间测量(1,1’,1”),其中在中间测量(1,1’,1”)期间生成照明光束(8),并且在没有确定距离值(a)的情况下检测测量光束(11)。9.根据权利要求8所述的方法,其特征在于,在多个中间测量(1,1’,1”)的情况下,在执行可能的中间测量(1,1’,1”)之前,检查由所述闭环控制器(7)确定的闭环控制差是否高于第一阈值并且因此需要另外的中间测量(1,1’,1”),或者由所述闭环控制器(7)确定的闭环控制差是否低于第二阈值并且因此不需要另外的中间测量(1,1’,1”)。10.根据权利要求7或8所述的方法,其特征在于,在紧接所述测量操作(14)的一个阶段之前的定时窗口中执行中间测量(1,1’,1”),以便校正所接收的光量与所述目标范围的可能偏差。11.根据权利要求7至10之一所述的方法,其特征在于,在测量操作(14)的两个连续阶段之间检测用于测量值改进的信息。12.根据权利要求11所述的方法,其特征在于,所述测量值改进包括用于校正背景光影响的背景遮蔽,其中,所述检测器暴露于背景光以获取用于背景遮蔽的信息,优选地在没有激活的照明光束的情况下。
技术总结
公开了一种具有闭环曝光控制的光学距离传感器。该距离传感器(2)包括光源(3)、检测器(4)、测量控制器(5)、评估单元(6)和闭环控制器(7)。光源(3)生成照明光束(8)并将该照明光束引导至被测物体(10)。检测器(4)检测已经由照明光束(8)在被测物体(10)上的反射引起的测量光束(11)。测量控制器(5)在测量光束(11)的检测期间和测量值的读出期间控制检测器(4)。在测量操作(14)的一个阶段中,出于确定距离传感器(2)和被测物体(10)之间的距离(a)的目的,评估单元(6)被设计成评估检测器(4)的测量值。闭环控制器(7)驱动光源(3)、检测器(4)和/或测量控制器(5),使得在快门时间期间由检测器(4)或检测器(4)的一部分检测的接收的光量处于目标范围内或接近所述目标范围。距离传感器(2)被设计成在测量操作(14)的各阶段中和在测量操作(14)的各阶段之间形成的测量间歇两者中都发射照明光束(8)和检测测量光束(11)并借助于闭环控制器(7)评估后者。此外,公开了光学距离传感器的闭环控制的相应方法。传感器的闭环控制的相应方法。传感器的闭环控制的相应方法。
技术研发人员:S
受保护的技术使用者:微-埃普西龙光电股份有限公司
技术研发日:2021.05.07
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。