1.本实用新型涉及车辆制动领域,尤其涉及一种电子机械制动系统。
背景技术:
2.目前汽车线控制动系统主要包含电子液压制动系统(ehb)和电子机械制动系统(emb)两种类型,电子液压制动系统技术当前已发展得相对比较成熟,已在乘用车,特别是新能源汽车上被广泛应用。区别于电子液压制动系统中以制动液作为制动能量传输介质,电子机械制动系统的制动能量来源以及制动能量的传输全部以电的形式实现,并最终通过控制和驱动车轮端的制动电机推动卡钳实现车辆制动。由于取消了机械液压管路系统,电子机械制动系统对环境不产生污染,同时,使用了电子机械制动的车辆在生产下线时无需制动液加注环节,后续使用中也不需定期更换制动液,既简化了整车生产工艺流程,也降低了后期用户维护和保养的成本。
3.在电子液压制动系统中,可以利用制动踏板及液压路径实现系统的基础备份制动,在电控路径失效时由驾驶员完成车辆的备份制动和停车,而在电子机械制动中,由于取消了机械液压备份制动路径,就要求在系统中出现单点失效时,仍可由其余的电控制动路径控制车辆按照需求的制动要求进行制动或停车,这就对电子机械制动系统的冗余性设计提出更高要求。
4.为满足制动系统中的备份制动和备份制动要求,在电子机械制动系统中,一般是通过在系统中构建冗余的电控制动路径去实现的。
5.为此,需要解决的技术问题:首先,针对系统中的每个组成单元的单点失效构建针对性的冗余单元及冗余制动路径,并保证冗余制动路径间的相对独立性;其次,根据系统故障类型,完成冗余制动路径的有效控制和切换,确保冗余制动路径的制动性能满足车辆制动要求;此外,系统组成单元间的相对布局灵活,易于在不同车型上进行布置和实现,系统结构简洁,便于在智能电动汽车的底盘域控制器或整车中央控制器上的集成与综合协同控制实现。
技术实现要素:
6.为解决上述问题,本实用新型提供一种电子机械制动系统,包括有四个轮端制动控制模块,每个所述轮端制动控制模块具备两路冗余供电电源输入,分别为供电输入线路一和供电输入线路二,轮端制动控制模块包含一个轮端制动控制器,一个制动电机以及对应的机械制动装置,轮端制动控制器选择两路冗余供电电源输入其中一路作为其主供电,另一路作为其备份供电;
7.轮端制动控制器中包含一个供电电源选通切换模块,供电电源选通切换模块包括有主供电输入线路模块和备份供电输入线路模块,在其主供电有效时选通使用主供电输入线路模块驱动轮端制动模块,当其主供电输入线路模块故障时,轮端制动控制器可自主地切换到其备份供电输入线路模块驱动轮端制动模块;
8.四个轮端制动控制模块的主供电为同一路主供电输入线路,同时,备份供电为另同一路冗余供电。
9.进一步改进在于,所述四个轮端制动控制模块同侧两个为一组或者对角的两个为一组,其中一组以供电输入线路一为主供电,以供电输入线路二为备份供电,另一组以供电输入线路二为主供电,以供电输入线路一为备份供电。
10.进一步改进在于,系统正常工作时,两组轮端制动控制模块分别通过主供电和备份供电协同实现系统制动控制目标,当其中一组的主供电故障时,这组的备用供电同时作为另一组的主供电为四个轮端制动控制模块供电。
11.进一步改进在于,前轮的两个轮端制动控制模块使用两路冗余供电输入线路,后轮的两个轮端制动控制模块使用单路供电,此情况下,其中的一个后轮轮端制动控制模块使用主供电,另一个后轮轮端制动控制模块使用备份供电。
12.进一步改进在于,四个轮端制动控制模块通过通信网络一相连,并与中央控制器一相连;同时,四个轮端制动控制模块通过另一路通信网络二相连,并与中央控制器二相连。
13.进一步改进在于,每个轮端制动控制模块通过信号检测路径与对应轮端的轮速传感器和压力传感器相连,由轮端制动控制模块完成对应车轮轮端的信号的检测和处理,并通过通信网络与中央控制器进行数据交互。
14.进一步改进在于,右前轮轮端制动控制模块与右前轮轮速传感器以及右前轮冗余轮速传感器相连,同时右前轮轮端制动控制模块与右前轮制动压力传感器相连;
15.右后轮轮端制动控制模块与右后轮轮速传感器以及右后轮冗余轮速传感器相连,同时右后轮轮端制动控制模块与右后轮制动压力传感器相连;
16.左前轮轮端制动控制模块与左前轮轮速传感器以及左前轮冗余轮速传感器相连,同时左前轮轮端制动控制模块与左前轮制动压力传感器相连;
17.左后轮轮端制动控制模块与左后轮轮速传感器以及左后轮冗余轮速传感器相连,同时左后轮轮端制动控制模块与左后轮制动压力传感器相连;
18.每个轮端的轮速传感器与冗余轮速传感器,通过一个具有两个内部独立冗余传感器单元的轮速传感器模块替换和实现。
19.进一步改进在于,系统包含了两个中央控制器,中央控制器一和中央控制器二,两个中央控制器构成主从结构,中央控制器一为主中央控制器,中央控制器二为从中央控制器,系统正常工作时,由主中央控制器完成系统全部功能,当主中央控制器出现故障或其对应接口数据异常时,由从中央控制器接管系统控制功能;
20.中央控制器一和中央控制器二通过通信网络三相连,用以实现两个控制器间的数据交互、校验和状态监控,同时中央控制器一和中央控制器二分别通过整车通讯网络一和整车通讯网络二与整车控制器相连,用于实现制动系统与整车控制系统数据交互;所述的主中央控制器与从中央控制器分别使用系统中不同的供电电源输入;中央控制器一和中央控制器二分别通过信号检测路径一和信号检测路径二接收来自制动踏板模拟器的制动踏板位置信号。
21.进一步改进在于,系统包含两个冗余的供电电源,主供电电源和备用供电电源,分别连接供电输入线路一和供电输入线路二;当其中一路供电电源出现故障时,系统中四个
轮端制动控制模块均可自主地将各自的供电输入线路切换到其备份供电电源;对于四个轮端制动控制模块统一使用主供电电源作为各自的主供电时,主供电电源需满足系统制动全部功能的供电需求,备用供电电源满足系统备份制动供电需求。
22.进一步改进在于,四个轮端制动控制模块均分为两组,一组使用主供电电源作为其主供电输入线路,另一组使用备用供电电源作为其主供电输入线路,主供电电源和备用供电电源均满足每组的供电需求以及四个轮端制动控制模块在系统备份制动下供电需求。
23.本实用新型的有益效果:本实用新型系统中每个车轮的轮速传感器,中央控制器,轮端制动控制模块,以及系统供电均采用冗余设计。冗余的两个中央控制器之间仅使用通信网络进行数据和信息交换,实现了控制层路径的电气故障隔离,保证了控制层的独立性。每个中央控制器与轮端制动控制模块之间仅使用通信网络进行数据和信息交换,实现了系统在制动执行层路径上单元间的电气故障隔离,保证了系统在制动执行层冗余路径的相对独立性。针对每个轮端制动控制模块的冗余供电设计,以及主从中央控制器使用不同供电电源的设计,进一步保证了系统在单路供电失效下冗余制动的有效性。在每个轮端制动控制模块中,轮端制动控制器中通过供电电源选通切换模块进行切换供电,在其主供电有效时选通使用主供电驱动轮端制动模块,当其主供电故障时,轮端制动控制器可自主地切换到其备份供电驱动轮端制动模块。
24.本实用新型由两个相对独立的中央控制器完成冗余信号的检测和相互校验,根据系统中出现的失效类型完成冗余制动路径的切换,结合冗余的主备供电电源分配方式,确保了系统在单点失效下冗余制动路径的制动性能满足车辆备份制动要求。
25.本实用新型系统中位于轮端的轮速信号以及夹紧压力等信号均由布置在轮端的轮端制动控制模块检测并处理,中央控制器与轮端制动控制模块间仅通过通信信号连接,这种分布式的系统架构,允许中央控制器在整车灵活布置以满足不同车型的应用要求。
附图说明
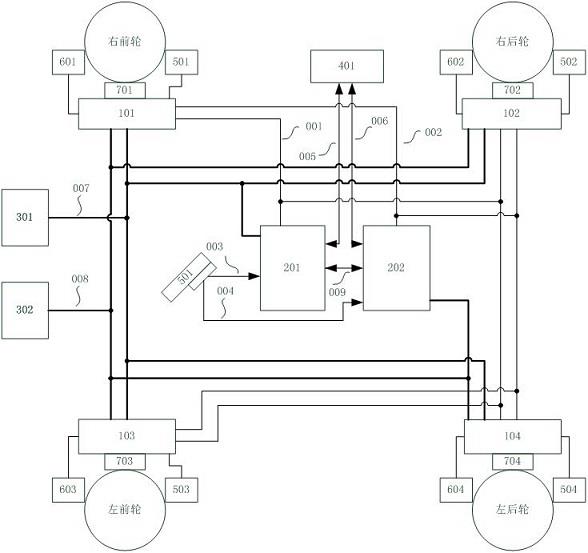
26.图1是本实用新型的系统示意图。
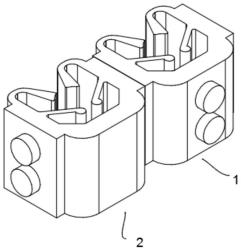
27.图2是本实用新型轮端制动模块的示意图。
28.图3是本实用新型四个轮端制动控制模块的主供电为同一路主供电输入,备份供电为另同一路冗余供电时的系统示意图。
29.图4 是本实用新型四个轮端制动控制模块以左右侧车轮分为两组时分开供电的系统示意图。
30.图5是本实用新型四个轮端制动控制模块以以对角侧车轮分为两组时分开供电的系统示意图。
31.图6是本实用新型为前轮的两个轮端制动控制模块使用两路冗余供电输入,后轮的两个轮端制动控制模块使用单路供电的系统示意图。
32.图7是本实用新型具有两个内部独立冗余传感器单元的轮速传感器的示意图。
33.其中:101-右前轮轮端制动控制模块,102-右后轮轮端制动控制模块,103-左前轮轮端制动控制模块,104-左后轮轮端制动控制模块,201-中央控制器一,202-中央控制器二,301-主供电电源,302-备用供电电源,401-整车控制器,501-右前轮轮速传感器,502-右后轮轮速传感器,503-左前轮轮速传感器,504-左后轮轮速传感器,601-右前轮冗余轮速传
感器,602-右后轮冗余轮速传感器,603-左前轮冗余轮速传感器,604-左后轮冗余轮速传感器,701-右前轮制动压力传感器,702-右后轮制动压力传感器,703-左前轮制动压力传感器,704-左后轮制动压力传感器,801-制动踏板模拟器,001-通信网络一,002-通信网络二,003-信号检测路径一,004-信号检测路径二,005-整车通讯网络一,006-整车通讯网络二,007-供电输入线路一,008-供电输入线路二,009-通信网络三。
具体实施方式
34.为了加深对本实用新型的理解,下面将结合实施例对本实用新型作进一步的详述,本实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
35.如图1所示,本实施例提供一种电子机械制动系统,包括有四个轮端制动控制模块,右前轮轮端制动控制模块101、右后轮轮端制动控制模块102、左前轮轮端制动控制模块103、左后轮轮端制动控制模块104;
36.每个轮端制动控制模块具备两路冗余供电电源输入,分别为供电输入线路一007和供电输入线路二008,供电输入线路一007连接有主供电电源301,供电输入线路二008连接有备用供电电源302;当其中一路供电电源出现故障时,系统中四个轮端制动控制模块均可自主地将各自的供电输入线路切换到其备份供电电源;对于四个轮端制动控制模块统一使用主供电电源作为各自的主供电时,主供电电源需满足系统制动全部功能的供电需求,备用供电电源满足系统备份制动供电需求。对于高级别智能驾驶系统,主供电电源和备用电源均需满足系统制动全部功能的供电需求。四个轮端制动控制模块均分为两组,一组使用主供电电源301作为其主供电输入线路,另一组使用备用供电电源302作为其主供电输入线路,主供电电源和备用供电电源均满足正常功能下每组的供电需求以及四个轮端制动控制模块在系统备份制动下供电需求。
37.如图2所示,轮端制动控制模块包含一个轮端制动控制器1011,一个制动电机1012以及对应的机械制动装置1013,轮端制动控制器1011选择两路冗余供电电源输入供电输入线路一007和供电输入线路二008的其中一路作为其主供电,另一路作为其备份供电;轮端制动控制器1011中包含一个供电电源选通切换模块10111,供电电源选通切换模块10111包括有主供电输入线路模块和备份供电输入线路模块,在其主供电有效时选通使用主供电输入线路模块驱动轮端制动模块,当其主供电输入线路模块故障时,轮端制动控制器可自主地切换到其备份供电输入线路模块驱动轮端制动模块。
38.如图3所示,四个轮端制动控制模块的主供电为同一路主供电输入线路,同时,备份供电为另同一路冗余供电,系统正常工作时,完全由主供电驱动四个轮端制动控制模块,当主供电故障时,四个轮端制动控制模块统一切换至备份供电。
39.为降低正常功能时的主供电电源负荷,均衡常态下主备供电输出功率需求,如图4所示,系统将四个轮端制动控制模块以左右侧车轮分为两组;如图5所示,系统将四个轮端制动控制模块以以对角侧车轮分为两组;其中一组以供电输入线路一007为主供电,以供电输入线路二008为备份供电,另一组以供电输入线路二008为主供电,以供电输入线路一007为备份供电;系统正常工作时,两组轮端制动控制模块分别通过主供电和备份供电协同实现系统制动控制目标,当其中一组的主供电故障时,这组的备用供电同时作为另一组的主供电为四个轮端制动控制模块供电。
40.为简化系统供电,同时满足冗余制动要求,如图6所示,前轮的两个轮端制动控制模块使用两路冗余供电输入线路,后轮的两个轮端制动控制模块使用单路供电,此情况下,其中的一个后轮轮端制动控制模块使用主供电,另一个后轮轮端制动控制模块使用备份供电,这样可保证在出现单个电源供电故障时,另一路电源至少为两个前轮和一个后轮轮端制动控制模块供电;这样保证了系统在电源单点失效时至少有三个轮端制动控制模块供电正常,可以满足制动要求,并节省了成本。
41.四个轮端制动控制模块通过通信网络一001相连,并与中央控制器一201相连;同时,四个轮端制动控制模块通过另一路通信网络二002相连,并与中央控制器二202相连;通信网络一001与通信网络二002为四个轮端制动控制模块与中央控制器之间构建了冗余的通信和控制路径。
42.每个轮端制动控制模块通过信号检测路径与对应轮端的轮速传感器和压力传感器相连,由轮端制动控制模块完成对应车轮轮端的信号的检测和处理,并通过通信网络与中央控制器进行数据交互。右前轮轮端制动控制模块101与右前轮轮速传感器501以及右前轮冗余轮速传感器601相连,同时右前轮轮端制动控制模块101与右前轮制动压力传感器701相连;右后轮轮端制动控制模块102与右后轮轮速传感器502以及右后轮冗余轮速传感器602相连,同时右后轮轮端制动控制模块102与右后轮制动压力传感器702相连;左前轮轮端制动控制模块103与左前轮轮速传感器503以及左前轮冗余轮速传感器603相连,同时左前轮轮端制动控制模块103与左前轮制动压力传感器703相连;左后轮轮端制动控制模块104与左后轮轮速传感器504以及左后轮冗余轮速传感器604相连,同时左后轮轮端制动控制模块104与左后轮制动压力传感器704相连;每个轮端的轮速传感器与冗余轮速传感器,通过一个具有两个内部独立冗余传感器单元的轮速传感器模块替换和实现,如图7所示。
43.系统包含了两个中央控制器,中央控制器一201和中央控制器二202,两个中央控制器构成主从结构,中央控制器一201为主中央控制器,中央控制器二202为从中央控制器,系统正常工作时,由主中央控制器完成系统全部功能,当主中央控制器出现故障或其对应接口数据异常时,由从中央控制器接管系统控制功能;中央控制器一201和中央控制器二202通过通信网络三009相连,用以实现两个控制器间的数据交互、校验和状态监控,同时中央控制器一201和中央控制器二202分别通过整车通讯网络一005和整车通讯网络二006与整车控制器401相连,用于实现制动系统与整车控制系统数据交互;所述的主中央控制器与从中央控制器分别使用系统中不同的供电电源输入;中央控制器一201和中央控制器二202分别通过信号检测路径一003和信号检测路径二004接收来自制动踏板模拟器801的制动踏板位置信号。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。