1.本实用新型涉及底泥采集技术领域,尤其涉及一种可充电便携式无线控制电动底泥采集装置。
背景技术:
2.底栖生物(benthos)是指栖息于海洋或内陆水域底内或底表的生物,是水生生物中的一个重要生态类型。近年来,利用底栖生物对水体进行生态研究得到了极大发展。在对海洋、湖泊或河流等水体进行科学研究或污染治理调查过程中往往需要采集水下底泥,目前,市面上流行的底泥采集装置大都依赖人力操纵机械设备采样,操作流程为:首先,依靠绞车绳或自身重力降落在水底,再由专业人员依靠熟练的操作技巧取样,其存在诸多缺陷,例如:1、对人力操作要求高:现存底泥采集装置取样基本依靠人力操作放斗—取泥—上升过程,步骤复杂,且对操作人员要求高。2、装置稳定性低:一般的抓斗式底泥采集装置设计结构简单,容易受到水下暗流的冲击使装置偏离预定的下降点。此外,国内外兴起多种水下机器人,可用于探索海底、采取水底有机物、还可以方便地代替人在高危险的深海区域进行勘探、测绘。但这种水下机器人对精密性、技术性要求高,导致其造价过高,不适用于一般仅在池塘、湖水底部的实用型研究。因此,急需开发一种可充电便携式无线控制电动底泥采集装置以解决上述技术问题。
3.有鉴于此,特提出本实用新型。
技术实现要素:
4.为了实现上述目的,本实用新型提供的一种可充电便携式无线控制电动底泥采集装置,结构简单,设计巧妙,通过无线控制,操作便捷,省时省力,稳定性高,成本低廉,可充电,携带方便,具有广阔的应用前景,有利于推广应用。
5.本实用新型的目的是提供一种可充电便携式无线控制电动底泥采集装置,包括采集容器,动力单元,信号接收器和遥控器,所述采集容器由两个扇形结构铰接而成,两个扇形结构的顶部分别与两根交叉设置的推动杆底端相铰接,所述推动杆由动力单元驱动上升或下降,所述动力单元的内部设有马达,齿轮一,齿轮二,天线收集器和可充电电池,所述推动杆的一侧设有齿轮槽,通过齿轮槽与齿轮二相啮合,所述齿轮二与齿轮一相啮合,所述齿轮一由马达驱动,当马达驱动推动杆向上移动时,采集容器开启,当马达驱动推动杆向下移动时,采集容器闭合,所述动力单元通过天线与信号接收器连接,所述信号接收器使用时漂浮于水面上,与遥控器无线连接,信号接收器接收到遥控器发出的信号后,通过天线传输信号给动力单元,从而控制天线收集器收放天线,以及控制马达带动推动杆开合采集容器,所述采集容器上连接有绳索。
6.优选地,所述采集容器扇形结构的顶部设有配重片,所述配重片呈圆形,直径为15-20cm,重量≤10kg。
7.优选地,所述动力单元的外壳上设有充电口,通过充电口为可充电电池充电。
8.优选地,所述采集容器的容量为1/16m3、1/12m3或1/10m3。
9.优选地,所述遥控器上设有四个按键,分别用于控制动力单元收放天线以及开合采集容器。
10.优选地,所述信号接收器,遥控器和马达均为防水型。
11.本实用新型提供的一种可充电便携式无线控制电动底泥采集装置,具有如下有益效果。
12.1.本实用新型结构简单,设计巧妙,通过无线控制,操作便捷,省时省力,稳定性高,成本低廉,可充电,携带方便,具有广阔的应用前景,有利于推广应用。
13.2.本实用新型通过按动遥控器上的按键发出无线信号,信号接收器接收到无线信号后,通过天线传输信号给动力单元,从而控制天线收集器收放天线,以及控制马达带动推动杆开合采集容器,操作便捷,省时省力,稳定性高。
附图说明
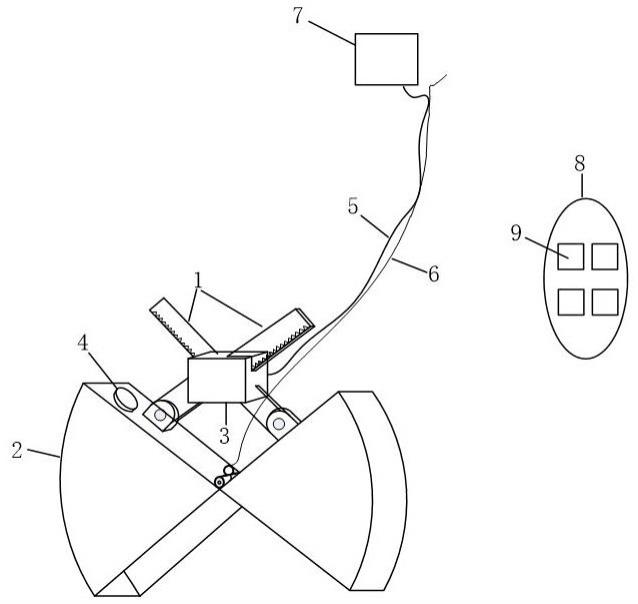
14.图1为本实用新型提供的一种可充电便携式无线控制电动底泥采集装置的结构示意图;
15.图2为本实用新型提供的一种可充电便携式无线控制电动底泥采集装置的采集容器闭合状态图;
16.图3为本实用新型提供的一种可充电便携式无线控制电动底泥采集装置的动力单元主视图;
17.图4为本实用新型提供的一种可充电便携式无线控制电动底泥采集装置的动力单元侧视图。
18.图中:
19.1.推动杆
ꢀꢀ
2.采集容器
ꢀꢀ
3.动力单元
ꢀꢀ
301.马达
ꢀꢀ
302.齿轮一
ꢀꢀ
303.齿轮二
ꢀꢀ
304.可充电电池
ꢀꢀ
305.充电口
ꢀꢀ
306.天线收集器
ꢀꢀ
4.配重片
ꢀꢀ
5.天线
ꢀꢀ
6.绳索
ꢀꢀ
7.信号接收器
ꢀꢀ
8.遥控器
ꢀꢀ
9.按键。
具体实施方式
20.下面结合具体实施例和附图对本实用新型做进一步说明,以助于理解本实用新型的内容。
21.如图1-2所示,分别为本实用新型提供的一种可充电便携式无线控制电动底泥采集装置的结构示意图及其采集容器闭合状态图。该可充电便携式无线控制电动底泥采集装置包括采集容器2,动力单元3,信号接收器7和遥控器8,所述采集容器2由两个扇形结构铰接而成,两个扇形结构的顶部分别与两根交叉设置的推动杆1底端相铰接,所述推动杆1由动力单元3驱动上升或下降。
22.如图3-4所示,分别为本实用新型提供的一种可充电便携式无线控制电动底泥采集装置的动力单元主视图和侧视图。所述动力单元3的内部设有马达301,齿轮一302,齿轮二303,天线收集器306和可充电电池304,所述推动杆1的一侧设有齿轮槽,通过齿轮槽与齿轮二303相啮合,所述齿轮二303与齿轮一302相啮合,所述齿轮一302由马达301驱动,当马达301驱动推动杆1向上移动时,采集容器2开启,当马达301驱动推动杆1向下移动时,采集
容器2闭合,所述动力单元3通过天线5与信号接收器7连接,所述信号接收器7与遥控器8无线连接,所述信号接收器7使用时漂浮于水面上,与遥控器8无线连接,信号接收器7接收到遥控器8发出的信号后,通过天线5传输信号给动力单元3,从而控制天线收集器306收放天线5,以及控制马达301带动推动杆1开合采集容器2,所述采集容器2上连接有绳索6,便于将采集容器2沉入水底或拉出水面,可手动操作,也可通过绞车进行操作。所述采集容器2扇形结构的顶部设有配重片4,所述配重片4呈圆形,直径为15-20cm,重量≤10kg。所述动力单元3的外壳上设有充电口305,通过充电口305为可充电电池304充电。所述采集容器2的容量为1/16m3、1/12m3或1/10m3。所述遥控器8上设有四个按键9,分别用于控制动力单元3收放天线5以及开合采集容器2。所述信号接收器7,遥控器8和马达301均为防水型。
23.本实用新型的工作原理为:
24.采集前,通过遥控器8控制天线收集器306将天线5放出,并遥控打开采集容器2,之后通过绳索6将底泥采集装置放置水底,当采集容器2完全接触到水底后,通过遥控器8控制动力单元3将采集容器2完全闭合,完成采集工作,接着通过绳索6将水下采集容器2拉出水面,再次遥控打开采集容器2,取出采集到的底泥,采集结束后,将底泥采集装置清洗干净,通过遥控器8将天线5收纳至天线收集器306内,以方便保存和携带。
25.本实用新型结构简单,设计巧妙,通过无线控制,操作便捷,省时省力,稳定性高,成本低廉,可充电,携带方便,具有广阔的应用前景,有利于推广应用。
26.本文中应用了具体个例对实用新型构思进行了详细阐述,以上实施例的说明只是用于帮助理解本实用新型的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离该实用新型构思的前提下,所做的任何显而易见的修改、等同替换或其他改进,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
