技术特征:
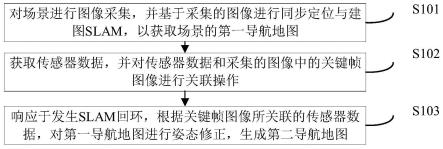
1.一种地图更新方法,其特征在于,包括:对场景进行图像采集,并基于采集的所述图像进行同步定位与建图slam,以获取所述场景的第一导航地图;获取传感器数据,并对所述传感器数据和采集的所述图像中的关键帧图像进行关联操作;响应于发生slam回环,根据所述关键帧图像所关联的传感器数据,对所述第一导航地图进行姿态修正,生成第二导航地图。2.根据权利要求1所述的方法,其特征在于,所述对所述传感器数据和采集的所述图像中的关键帧图像进行关联操作,包括:获取在所述关键帧图像的采集时刻所采集到的传感器数据;将在所述采集时刻所采集到的传感器数据与所述关键帧图像进行关联。3.根据权利要求1或2所述的方法,其特征在于,所述对所述传感器数据和采集的所述图像中的关键帧图像进行关联操作之后,还包括:对所述关键帧图像与所关联的传感器数据进行压缩存储。4.根据权利要求3所述的方法,其特征在于,所述对所述关键帧图像与所关联的传感器数据进行压缩存储,包括:获取所述关键帧图像的特征信息;将所述关键帧图像的特征信息与所关联的传感器数据进行存储。5.根据权利要求1所述的方法,其特征在于,所述根据所述关键帧图像所关联的传感器数据,对所述第一导航地图进行姿态修正,生成第二导航地图,包括:根据所述关键帧图像,获取所述关键帧图像对应的地图位置点和所述地图位置点的第一姿态;根据所述关键帧图像所关联的传感器数据,确定所述地图位置点的第二姿态;响应于所述第一姿态与所述第二姿态存在偏差,则基于所述第二姿态数据对所述第一导航地图进行姿态修正,以生成所述第二导航地图。6.根据权利要求1或2或5所述的方法,其特征在于,所述方法还包括:进行slam回环检测,若检测出回归到所述slam的起始位置,则确定发生所述slam回环。7.根据权利要求6所述的方法,其特征在于,所述进行slam回环检测,包括:将当前采集的第一帧图像与所述起始位置采集的第二帧图像进行对比;响应于所述第一帧图像与所述第二帧图像相似,则检测出回归到所述slam的起始位置。8.根据权利要求1或2或5所述的方法,其特征在于,所述方法还包括:提取每帧所述图像的特征信息;从采集的所述图像中,识别所述特征信息满足设定条件的图像,确定为所述关键帧图像。9.一种地图更新装置,其特征在于,包括:获取模块,用于对场景进行图像采集,并基于采集的所述图像进行同步定位与建图slam,以获取所述场景的第一导航地图;关联模块,用于获取传感器数据,并对所述传感器数据和采集的所述图像中的关键帧
图像进行关联操作;修正模块,用于响应于发生slam回环,根据所述关键帧图像所关联的传感器数据,对所述第一导航地图进行姿态修正,生成第二导航地图。10.根据权利要求9所述的装置,其特征在于,所述关联模块,还用于:获取在所述关键帧图像的采集时刻所采集到的传感器数据;将在所述采集时刻所采集到的传感器数据与所述关键帧图像进行关联。11.根据权利要求9或10所述的装置,其特征在于,所述关联模块,还用于:对所述关键帧图像与所关联的传感器数据进行压缩存储。12.根据权利要求11所述的装置,其特征在于,所述关联模块,还用于:获取所述关键帧图像的特征信息;将所述关键帧图像的特征信息与所关联的传感器数据进行存储。13.根据权利要求9所述的装置,其特征在于,所述修正模块,还用于:根据所述关键帧图像,获取所述关键帧图像对应的地图位置点和所述地图位置点的第一姿态;根据所述关键帧图像所关联的传感器数据,确定所述地图位置点的第二姿态;响应于所述第一姿态与所述第二姿态存在偏差,则基于所述第二姿态数据对所述第一导航地图进行姿态修正,以生成所述第二导航地图。14.根据权利要求9或10或13所述的装置,其特征在于,还包括:回环检测模块,用于进行slam回环检测,若检测出回归到所述slam的起始位置,则确定发生所述slam回环。15.根据权利要求14所述的装置,其特征在于,所述回环检测模块,还用于:将当前采集的第一帧图像与所述起始位置采集的第二帧图像进行对比;响应于所述第一帧图像与所述第二帧图像相似,则检测出回归到所述slam的起始位置。16.根据权利要求9或10或13所述的装置,其特征在于,还包括:关键帧确定模块,用于提取每帧所述图像的特征信息,从采集的所述图像中,识别所述特征信息满足设定条件的图像,确定为所述关键帧图像。17.一种电子设备,其特征在于,包括处理器和存储器;其中,所述处理器通过读取所述存储器中存储的可执行程序代码来运行与所述可执行程序代码对应的程序,以用于实现如权利要求1-8中任一所述的方法。18.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-8中任一所述的方法。19.一种计算机程序产品,其特征在于,当所述计算机程序产品中的指令处理器执行时实现如权利要求1-8中任一所述的方法。
技术总结
本公开关于一种地图更新方法及其装置,涉及导航定位领域。包括:通过对场景进行图像采集,并基于采集的图像进行同步定位与建图SLAM,以获取场景的第一导航地图;获取传感器数据,并对传感器数据和采集的图像中的关键帧图像进行关联操作;响应于发生SLAM回环,根据关键帧图像所关联的传感器数据,对第一导航地图进行姿态修正,生成第二导航地图。本申请通过与关键帧图像同步的传感器数据对第一导航地图进行姿态修正,能够减小SLAM累计误差导致的建图误差,使得最终生成的导航地图更加贴合实际场景,精度更高,从而使得机器人在地图中进行正确导航,当机器人行进过程中前方存在障碍影响前进时,有利于帮助机器人更精准、快速的进行避障工作。的进行避障工作。的进行避障工作。
技术研发人员:豆子飞
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:2021.07.30
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。