1.本发明属于作业机械领域,具体地,涉及一种室内作业机械。
背景技术:
2.在建筑行业中,常用到室内作业机械,例如拆除机械、吊运机械等,由于室内作业机械经常需要在门洞、走廊、电梯等较狭小的空间内转移,室内作业机械的整体体积受到较大的限制,现有的室内作业机械主要由履带式行走机构、设置在履带式行走机构上的机械臂以及设置在机械臂的末端的作业属具组成,通过履带式行走机构承载机械臂行走,由机械臂带动作业属具移动实现作业,在作业过程中,室内作业机械一般通过配重或者可折叠的支撑腿进行支撑以防止倾翻,但由于室内作业机械的体积受到较大的限制,所携带的配重或支撑腿的作用局限性较大,导致室内作业机械作业时能够承受的载荷极其有限,作业范围的局限性较大,且作业时存在较高的倾翻风险。
技术实现要素:
3.针对现有技术中的上述不足或缺陷,本发明提供一种室内作业机械,旨在解决的现有的室内作业机械作业范围的局限性较大且作业时存在较高的倾翻风险的技术问题。
4.为实现上述目的,本发明提供了一种室内作业机械,包括:
5.支撑组件,包括第一支架、第二支架以及水平扩展机构,所述第一支架和所述第二支架沿第一水平方向间隔设置,所述水平扩展机构连接于所述第一支架和所述第二支架之间,用于驱动所述第一支架和所述第二支架沿第一水平方向相向或相背移动,以调节所述第一支架和所述第二支架在所述第一水平方向上的间距;和
6.作业组件,包括机械臂和作业属具,所述机械臂设置于所述第一支架上,所述作业属具设置于所述机械臂的末端部。
7.可选地,所述水平扩展机构包括:
8.剪叉单元,连接于所述第一支架和所述第二支架之间;和
9.扩展驱动件,用于驱动所述剪叉单元沿所述第一水平方向伸缩,以带动所述第一支架和所述第二支架沿第一水平方向相向或相背移动。
10.可选地,所述第一支架沿竖直方向的顶端和底端分别设有第一顶端连接座和第一底端连接座,所述第二支架沿竖直方向的顶端和底端分别设有第二顶端连接座和第二底端连接座,且所述第二顶端连接座和所述第二底端连接座分别与所述第一顶端连接座和所述第一底端连接座相对设置,其中,所述第一顶端连接座和所述第二顶端连接座均能够沿竖直方向滑动;和/或,所述第一底端连接座和所述第二底端连接座均能够沿竖直方向滑动;
11.所述剪叉单元包括相互交叉铰接的第一剪叉杆和第二剪叉杆,所述第一剪叉杆的顶端和底端分别与所述第一顶端连接座和所述第二底端连接座铰接,所述第二剪叉杆的顶端和底端分别与所述第二顶端铰接座和所述第一底端铰接座铰接;
12.所述扩展驱动件为伸缩油缸,所述扩展驱动件的两端分别与所述第一顶端连接座
和所述第一底端连接座连接;或者,所述扩展驱动件的两端分别与所述第二顶端连接座和所述第二底端连接座连接。
13.可选地,所述第一支架和所述第二支架均包括沿第二水平方向间隔设置的两个支撑立柱和连接于两个所述支撑立柱之间的横梁,所述第二水平方向与所述第一水平方向垂直,所述支撑立柱包括:
14.立柱本体,沿竖直方向延伸;
15.顶端撑杆和第一撑杆驱动件,所述顶端撑杆从所述立柱本体的顶端端面伸出并在所述第一撑杆驱动件的驱动下能够沿竖直方向伸缩;
16.底端撑杆和第二撑杆驱动件,所述底端撑杆从所述立柱本体的底端端面伸出并在所述第二撑杆驱动件的驱动下能够沿竖直方向伸缩。
17.可选地,所述第一支架还包括机械臂支承板,所述机械臂支承板固定连接于所述第一支架的两个所述支撑立柱的所述底端撑杆的末端之间,所述机械臂设置于所述机械臂支承板上。
18.可选地,每个所述支撑立柱的底端均设置有移动轮,所述支撑立柱的所述底端撑杆向上回缩至极限位置时末端的高度高于所述移动轮。
19.可选地,所述室内作业机械还包括:
20.控制终端,用于发出折叠控制指令或展开控制指令;和
21.控制器,被配置为:
22.当接收到折叠控制指令时,控制所述第一撑杆驱动件和所述第二撑杆驱动件分别驱动对应的所述顶端撑杆和所述底端撑杆沿竖直方向回缩,待所述顶端撑杆和所述底端撑杆回缩至极限位置后,控制所述水平扩展机构驱动所述第一支架和所述第二支架沿第一水平方向相向移动;
23.当接收到展开控制指令时,控制所述水平扩展机构驱动所述第一支架和所述第二支架沿第一水平方向相背移动,待所述第一支架和所述第二支架相背移动至预设位置后,控制所述第一撑杆驱动件和所述第二撑杆驱动件分别驱动对应的所述顶端撑杆和所述底端撑杆沿竖直方向外伸。
24.可选地,所述控制终端为遥控器或者移动终端。
25.可选地,所述作业属具为第一滑轮,所述作业组件还包括吊升机构,所述吊升机构包括绞车、钢丝绳以及第二滑轮,所述第二滑轮和所述绞车呈上下布置地设置于所述第二支架上,所述钢丝绳的一端缠绕于所述绞车上,另一端依次绕过所述第二滑轮和所述第一滑轮后垂直向下延伸并设有用于吊装重物的吊钩。
26.可选地,所述机械臂包括:
27.基座,可转动地设置于所述第一支架上;
28.第一臂节和第二臂节,所述第一臂节的第一端与所述基座可转动地连接,所述第二臂节的第一端与所述第一臂节的第二端可转动地连接,所述作业属具设置于所述第二臂节的第二端;
29.第一转动驱动件,用于驱动所述基座相对所述第一支架绕竖直轴线转动;
30.第二转动驱动件,用于驱动所述第一臂节相对所述基座绕第一水平轴线转动;
31.第三转动驱动件,用于驱动所述第二臂节相对所述第一臂节绕第二水平轴线转
动,所述第二水平轴线与所述第一水平轴线平行
32.在本发明的室内作业机械中,支撑组件包括第一支架和第二支架,且第一支架和第二支架在水平扩展机构的驱动下能够沿第一水平方向相向或相背移动以调节相互之间的间距,如此设置,当室内作业机械需要转移时,通过水平扩展机构驱动第一支架和第二支架相向移动以缩小相互之间的间距,可极大地缩减室内作业机械的整体体积,提高了室内作业机械在狭小的空间内转移的便利性,当室内作业机械需要作业时,通过水平扩展机构驱动第一支架和第二支架相背移动以增大相互之间的间距,如此,可增大支撑组件整体的支撑面积和支撑跨度,极大地提高了支撑组件支撑机械臂的稳固性和强度,从而极大地提高了室内作业机械作业时能够承受的载荷,且通过水平扩展机构驱动第一支架和第二支架移动可调节室内作业机械作业时能够承受的载荷,通过这样,可扩大室内作业机械的作业范围,且有效降低作业时倾翻的风险。
33.本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
34.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
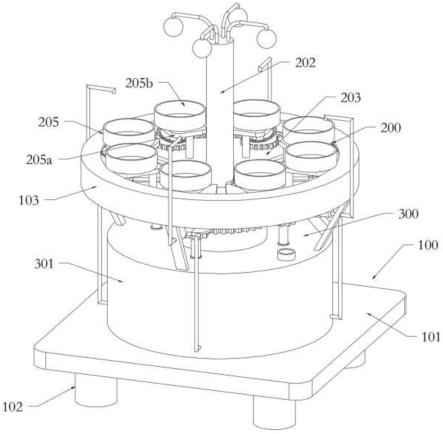
35.图1为本发明的一种实施方式中的室内作业机械的结构示意图;
36.图2为图1中的支撑组件的结构示意图;
37.图3为图1中的机械臂的结构示意图;
38.图4为图1中的室内作业机械的侧视图;
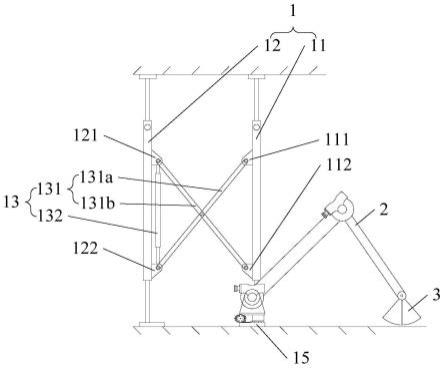
39.图5为另一种实施方式中的室内作业机械的结构示意图;
40.图6为图5中的室内作业机械在台阶面上作业的结构示意图;
41.图7为图5中的室内作业机械处于折叠状态的结构示意图;
42.图8为图5中的室内作业机械的侧视图。
43.附图标记说明:
[0044]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑组件
[0045]
11
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一支架
[0046]
111
ꢀꢀꢀꢀꢀꢀꢀ
第一顶端连接座
ꢀꢀꢀꢀꢀꢀ
112
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一底端连接座
[0047]
12
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二支架
[0048]
121
ꢀꢀꢀꢀꢀꢀꢀ
第二顶端连接座
ꢀꢀꢀꢀꢀꢀ
122
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二底端连接座
[0049]
13
ꢀꢀꢀꢀꢀꢀꢀꢀ
水平扩展机构
[0050]
131
ꢀꢀꢀꢀꢀꢀꢀ
剪叉单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131a
ꢀꢀꢀꢀꢀꢀꢀ
第一剪叉杆
[0051]
131b
ꢀꢀꢀꢀꢀꢀ
第二剪叉杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
ꢀꢀꢀꢀꢀꢀꢀꢀ
扩展驱动件
[0052]
14
ꢀꢀꢀꢀꢀꢀꢀꢀ
支撑立柱
[0053]
141
ꢀꢀꢀꢀꢀꢀꢀ
立柱本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
142
ꢀꢀꢀꢀꢀꢀꢀꢀ
顶端撑杆
[0054]
143
ꢀꢀꢀꢀꢀꢀꢀ
底端撑杆
[0055]
15
ꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂支承板
[0056]
16
ꢀꢀꢀꢀꢀꢀꢀꢀ
移动轮
[0057]
17
ꢀꢀꢀꢀꢀꢀꢀꢀ
绞车支承板
[0058]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂
[0059]
21
ꢀꢀꢀꢀꢀꢀꢀꢀ
基座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一臂节
[0060]
23
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二臂节
[0061]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
作业属具
[0062]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
吊升机构
[0063]
41
ꢀꢀꢀꢀꢀꢀꢀꢀ
绞车
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
钢丝绳
[0064]
43
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二滑轮
具体实施方式
[0065]
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0066]
需要说明的是,在不冲突的情况下,本发明中的实施方式及实施方式中的特征可以相互组合。
[0067]
在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的或者是针对竖直、垂直或重力方向上而言的各部件相互位置关系描述用词。
[0068]
下面将参考附图并结合实施方式来详细说明本发明。
[0069]
本发明首先提供了一种室内作业机械。
[0070]
在一种实施方式中,参照附图1至附图8所示,室内作业机械包括支撑组件1和作业组件,支撑组件1包括第一支架11、第二支架12以及水平扩展机构13,第一支架11和第二支架12沿第一水平方向间隔设置,水平扩展机构13连接于第一支架11和第二支架12之间,用于驱动第一支架11和第二支架12沿第一水平方向相向或相背移动,以调节第一支架11和第二支架12在第一水平方向上的间距,作业组件包括机械臂2和作业属具3,机械臂2设置于第一支架11上,作业属具3设置于机械臂2的末端部。
[0071]
可以理解地,在本实施方式中,支撑组件1包括第一支架11和第二支架12,且第一支架11和第二支架12在水平扩展机构13的驱动下能够沿第一水平方向相向或相背移动以调节相互之间的间距,如此设置,当室内作业机械需要转移时,通过水平扩展机构13驱动第一支架11和第二支架12相向移动以缩小相互之间的间距,可极大地缩减室内作业机械的整体体积,提高了室内作业机械在狭小的空间内转移的便利性,当室内作业机械需要作业时,通过水平扩展机构13驱动第一支架11和第二支架12相背移动以增大相互之间的间距,如此,可增大支撑组件1整体的支撑面积和支撑跨度,极大地提高了支撑组件1支撑机械臂2的稳固性和强度,从而极大地提高了室内作业机械作业时能够承受的载荷,且通过水平扩展机构驱动第一支架11和第二支架12移动可调节室内作业机械作业时能够承受的载荷,通过这样,可扩大室内作业机械的作业范围,且有效降低作业时倾翻的风险。
[0072]
具体地,作业属具3可以为抓斗,在机械臂2的带动下分别能够实现垃圾清理的作业,作业属具3还可以为冲击钻,在机械臂2的带动下分别能够实现拆墙作业,作业属具3还可以为载人平台,在机械臂2的带动下分别能够实现载人作业。
[0073]
在一种实施方式中,参照附图1和附图2所示,水平扩展机构13包括剪叉单元131和扩展驱动件132,剪叉单元131连接于第一支架11和第二支架12之间,扩展驱动件132用于驱
动剪叉单元131沿第一水平方向伸缩,以带动第一支架11和第二支架12沿第一水平方向相向或相背移动,也就是说,通过扩展驱动件132驱动剪叉单元131沿第一水平方向伸展,可带动第一支架11和第二支架12沿第一水平方向相背移动,通过扩展驱动件132驱动剪叉单元131沿第一水平方向收缩,可带动第一支架11和第二支架12沿第一水平方向相向移动。
[0074]
具体地,水平扩展机构13可包括多个剪叉单元131和多个扩展驱动件132,多个剪叉单元131并排连接于第一支架11和第二支架12之间,多个扩展驱动件132分别一一对应地驱动多个剪叉单元131沿第一水平方向伸缩,如此设置,可提高水平扩展机构13驱动第一支架11和第二支架12沿第一水平方向相向或相背移动的可靠性。
[0075]
在一种实施方式中,参照附图1和附图2所示,第一支架11沿竖直方向的顶端和底端分别设有第一顶端连接座111和第一底端连接座112,第二支架12沿竖直方向的顶端和底端分别设有第二顶端连接座121和第二底端连接座122,且第二顶端连接座121和第二底端连接座122分别与第一顶端连接座111和第一底端连接座112相对设置,其中,第一顶端连接座111和第二顶端连接座121均能够沿竖直方向滑动;和/或,第一底端连接座112和第二底端连接座122均能够沿竖直方向滑动;剪叉单元131包括相互交叉铰接的第一剪叉杆131a和第二剪叉杆131b,第一剪叉杆131a的顶端和底端分别与第一顶端连接座111和第二底端连接座122铰接,第二剪叉杆131b的顶端和底端分别与第二顶端铰接座和第一底端铰接座铰接;扩展驱动件132为伸缩油缸,扩展驱动件132的两端分别与第一顶端连接座111和第一底端连接座112连接;或者,扩展驱动件132的两端分别与第二顶端连接座121和第二底端连接座122连接。
[0076]
可以理解地,扩展驱动件132的伸缩动作,可带动第一顶端连接座111和第二顶端连接座121沿竖直方向滑动;和/或,扩展驱动件132的伸缩动作,可带动第一底端连接座112和第二底端连接座122沿竖直方向滑动,如此,通过扩展驱动件132的伸缩动作可实现剪叉单元131沿第一水平方向的伸缩。
[0077]
具体地,第一支架11的顶端和第二支架12的顶端均设置有沿竖直方向延伸的滑轨,第一顶端连接座111和第二顶端连接座121分别可滑动地连接于第一支架11的顶端的滑轨和第二支架12的顶端的滑轨上;和/或,第一支架11的底端和第二支架12的底端均设置有沿竖直方向延伸的滑轨,第一底端连接座112和第二底端连接座122分别可滑动地连接于第一支架11的底端的滑轨和第二支架12的底端的滑轨上。
[0078]
在一种实施方式中,参照附图4和附图8所示,第一支架11和第二支架12均包括沿第二水平方向间隔设置的两个支撑立柱14和连接于两个支撑立柱14之间的横梁,第二水平方向与第一水平方向垂直,支撑立柱14包括立柱本体141、顶端撑杆142、第一撑杆驱动件、底端撑杆143以及第二撑杆驱动件,立柱本体141沿竖直方向延伸,顶端撑杆142从立柱本体141的顶端端面伸出并在第一撑杆驱动件的驱动下能够沿竖直方向伸缩,底端撑杆143从立柱本体141的底端端面伸出并在第二撑杆驱动件的驱动下能够沿竖直方向伸缩,如此设置,当室内作业机械需要在室内作业时,可将顶端撑杆142和底端撑杆143伸出以分别抵顶于室内的天花板和地面,从而使得支撑组件1有效利用建筑的室内原有结构进行固定,进而稳固可靠地对机械臂2进行支撑。
[0079]
可以理解地,参照附图6所示,对于不同的支撑立柱14,顶端撑杆142和底端撑杆143的伸出长度可不一致,如此,可使得第一支架11和第二支架2能够适用于台阶面上的支
撑作业,实际应用时,位于台阶较高处的支撑立柱14的顶端撑杆142和底端撑杆143伸出长度较短,位于台阶较低处的支撑立柱14的顶端撑杆142和底端撑杆143伸出长度较长。
[0080]
具体地,在第一支架11或第二支架12中,两个支撑立柱14与横梁之间可以为一体成型结构或者通过焊接进行固定连接,且两个支撑立柱14之间可设置多条横梁以提高支架结构的稳固性和强度。
[0081]
具体地,顶端撑杆142和底端撑杆143的末端均可设置有垫板,以提高支撑强度。
[0082]
具体地,第一撑杆驱动件和第二撑杆驱动件均可采用伸缩油缸或者伸缩电动缸,可设置于支撑立柱14的立柱本体141内部,且活塞杆对应分别与顶端撑杆142和底端撑杆143传动连接。
[0083]
在一种实施方式中,参照附图4所示,第一支架11还包括机械臂支承板15,机械臂支承板15固定连接于第一支架11的两个支撑立柱14的底端撑杆143的末端之间,机械臂2设置于机械臂支承板15上,如此设置,当两个支撑立柱14的底端撑杆143的末端抵顶于室内的地面时,机械臂支承板15也能够抵靠于地面上,使得作业时地面对机械臂支承板15和机械臂支承板15上的机械臂2起到支撑作用,通过这样,可进一步提高机械臂2所能够承受的最大载荷,进一步提高室内作业机械的适用范围。
[0084]
具体地,机械臂支承板15可通过焊接或者可拆卸的连接方式与两个支撑立柱14的底端撑杆143的末端固定连接。
[0085]
在一种实施方式中,参照附图4所示,每个支撑立柱14的底端均设置有移动轮16,支撑立柱14的底端撑杆143向上回缩至极限位置时末端的高度高于移动轮16,如此设置,当室内作业机械需要转移时,可使支撑立柱14的底端撑杆143向上回缩至极限位置,此时,移动轮16抵触地面对第一支架11和第二支架12起到支撑作用,且由于移动轮16与地面之间为滚动摩擦,便于室内作业机械转移。
[0086]
具体地,移动轮16可采用万向轮或者滚轮。
[0087]
在一种实施方式中,室内作业机械还包括控制终端和控制器,控制终端用于发出折叠控制指令或展开控制指令,控制器被配置为:
[0088]
当接收到折叠控制指令时,控制第一撑杆驱动件和第二撑杆驱动件分别驱动对应的顶端撑杆142和底端撑杆143沿竖直方向回缩,待顶端撑杆142和底端撑杆143回缩至极限位置后,控制水平扩展机构13驱动第一支架11和第二支架12沿第一水平方向相向移动;
[0089]
当接收到展开控制指令时,控制水平扩展机构13驱动第一支架11和第二支架12沿第一水平方向相背移动,待第一支架11和第二支架12相背移动至预设位置后,控制第一撑杆驱动件和第二撑杆驱动件分别驱动对应的顶端撑杆142和底端撑杆143沿竖直方向外伸。
[0090]
通过这样,操作人员可通过控制终端向控制器发出折叠控制指令或展开控制指令,使室内作业机械自动切换至折叠状态以便于转移或者切换至展开状态以进行作业,自动化程度较高,极大地提高了操作的便利性。
[0091]
具体地,控制器可设置于第一支架11和/或第二支架12上以随室内作业机械同步转移。
[0092]
具体地,控制终端为遥控器或者移动终端,遥控器或者移动终端与控制器可采用无线通信的连接方式,以提高操控的便利性。
[0093]
在本实施方式中,控制器可以是中央处理器或者微处理器等具有控制功能的硬件
结构。至于控制器基于特定信号或指令,来控制执行机构(例如本实施方式中的水平扩展机构13、第一撑杆驱动件以及第二撑杆驱动件)的启闭或者动作时间等,均可以通过现有手段来实现,此处不做展开说明。
[0094]
在一种实施方式中,参照附图5至附图8所示,作业属具3为第一滑轮,作业组件还包括吊升机构4,吊升机构4包括绞车41、钢丝绳42以及第二滑轮43,第二滑轮43和绞车41呈上下布置地设置于第二支架12上,钢丝绳42的一端缠绕于绞车41上,另一端依次绕过第二滑轮43和第一滑轮后垂直向下延伸并设有用于吊装重物的吊钩,如此设置,通过吊升机构4和机械臂2的配合作业可实现重物吊升和移动作业,且由于第一支架11和第二支架12之间的间距可调,使得吊升机构4和机械臂2的配合作业能够吊升重量较大的重物,具有较大的作业范围。
[0095]
具体地,第二支架12的两个支撑立柱14的底端撑杆143的末端之间可固定连接有绞车支承板17,绞车41可设置于绞车支承板17上,第二滑轮43可设置于两个支撑立柱14之间的横梁上,如此设置,当第二支架12的两个支撑立柱14的底端撑杆143的末端抵顶于室内的地面时,绞车支承板17也能够抵靠于地面上,使得作业时地面对绞车支承板17和绞车支承板17上的绞车41起到支撑作用,通过这样,可进一步提高绞车41所能够承受的最大载荷,进一步提高室内作业机械吊升重物的适用范围。
[0096]
具体地,绞车支承板17可通过焊接或者可拆卸的连接方式与两个支撑立柱14的底端撑杆143的末端固定连接。
[0097]
在一种实施方式中,参照附图3所示,机械臂2包括基座21、第一臂节22、第二臂节23、第一转动驱动件、第二转动驱动件以及第三转动驱动件,基座21可转动地设置于第一支架11上,第一臂节22的第一端与基座21可转动地连接,第二臂节23的第一端与第一臂节22的第二端可转动地连接,作业属具3设置于第二臂节23的第二端,第一转动驱动件用于驱动基座21相对第一支架11绕竖直轴线转动,第二转动驱动件用于驱动第一臂节22相对基座21绕第一水平轴线转动,第三转动驱动件用于驱动第二臂节23相对第一臂节22绕第二水平轴线转动,第二水平轴线与第一水平轴线平行。
[0098]
具体地,基座21与第一支架11之间、第一臂节22的第一端与基座21之间以及第二臂节23的第一端与第一臂节22的第二端之间均可通过回转支承进行连接,以实现相对可转动,第一转动驱动件、第二转动驱动件以及第三转动驱动件可采用驱动电机。
[0099]
以上仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0100]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
[0101]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。